一种有效消弱多路径误差的定位方法研究
2015-02-22任绍俊秦亮亮
任绍俊,秦亮亮
(中国人民解放军91550部队,辽宁 大连 116023)
一种有效消弱多路径误差的定位方法研究
任绍俊,秦亮亮
(中国人民解放军91550部队,辽宁 大连 116023)
摘要多路径误差是高精度短基线GPS测量的主要误差之一。传统的GPS测量方法无法满足舰载武器装备试验的测量要求。介绍多路径误差产生的机理和误差解析,提出一种借助全站仪激光测距并且合理布站GPS接收机的有效消弱GPS多路径误差的定位测量方法。建立了解决实际测量问题的数学模型,提出具体测量方案。该方法经实际试验验证准确有效,达到武器装备精度测量的要求。
关键词GPS;基线;多路径误差;全站仪
0引言
靶场武器装备试验中,高精度的测量工作是研究分析和鉴定武器装备性能的一项必不可少的重要环节。GPS测量因具全天候实时高精度导航定位和授时优点[1]被广泛应用,并担任着重要的角色。
试验中,需要对舰载某武器装备基准点的运动轨迹进行测量,尤其是在某一特定时刻,需要该基准点的准确位置。对于该基准点位置的现行测量方法是:在岸边的基站放置一台GPS接收机,在舰上武器装备附近放置单台GPS接收机,事后差分解算求解舰上GPS天线位置,再以GPS天线的位置做简单修正,来代替武器装备基准点位置。该装备周围高反射环境特别复杂导致多路径效应影响严重,甚至发生过信号失锁现象。用现行方法测得基准点位置的解算精度较低,必须采用新的测量方法以有效减弱多路径误差的影响,从而提高GPS数据的测量精度。
1多路径误差产生的机理及误差解析
GPS测量是通过GPS接收机接收GPS卫星传送的信息来确定该点的三维坐标,具有实时高精度定位的特点。实际GPS控制网的短基线测量工作中,观测值不可避免地存在误差。影响GPS点位测量成果可靠性精确性的原因,主要取决于4大因素[2]:接收机、处理软件、所测卫星的图形强度和观测环境。这些因素产生的误差,比如星历误差、卫星钟差、电离层和对流层误差以及GPS接收机产生的误差,可以通过差分的形式消弱或消除,而在平差过程中却不能很好地消去多路径误差。这样,GPS测量数据解算的误差将集中在多路径误差[3]上。可以说多路径误差是GPS高精度测量工作中的一个瓶颈,是GPS控制网短基线测量的主要误差源。
1.1 多路径误差产生机理
在GPS测量中,如果测站周围的反射物所反射的卫星信号(反射波)进入GPS接收机天线,这就将和直接来自卫星的信号(直接波)产生干涉,两种信号的叠加将引起天线相位中心位置的迁移,从而使观测值偏离真值产生所谓的“多路径误差”。这种由于多路径的信号传播所引起的干涉时延效应被称作多路径效应[4]。
多路径误差的模型随天线附近的地形、地物而异,很复杂。为了便于理解GPS相位测量中多路径误差的影响,下面采用简化模型,即只有地面反射的一般情况。如图1所示。
图1 简化的多路径效应
1.2 多路径误差解析
从GPS卫星发射出的载波波长为λ的GPS信号[5]到达GPS接收机的天线相位中心点A时,GPS接收机接收到的GPS卫星信号既有直接的入射信号,又有天线四周的物体反射的反射信号。两种信号所经过的路径长度是不同的,同直接的入射信号相比,反射信号的路程长了(D1+D2),称为程差。从图1中可看出:

(1)

(2)
式中,ε为卫星高度角;Η为天线至地面点的高度。
直接信号同反射信号之间的相位差θ为:
(3)
将式(1)、式(2)代入式(3)得:

(4)
直接信号的强度可表示为:
Sd=Adsinφ。
(5)
式中,Sd为直接信号强度;Ad为直接信号振幅;φ为相位角。
间接信号的振幅将减小α因子
Ar=αAd。
(6)
式中,Ar为反射信号的振幅;α为减弱因子(α<1)。
直接信号、反射信号和最后的混合信号三者之间的关系,可用向量图来表示,如图2所示。
图2 信号关系向量示意
图2中,Sr为反射信号;Sd为直接信号;Sm为混合信号;ψ为直接信号和混合信号相位差。因此,直接信号和反射信号之间的相位差可由下式得出。

(7)
结合式(5)、式(6)可得出下列几何关系式:
a=αAdsinφ·cos(π-θ)=-αAdsinφ·cosθ,
(8)

(9)
将式(8)、式(9)代入式(7)可得:

(10)
用式(4)求出的θ值代入式(10)最后得:
(11)
由式(11)可见,多路径信号的影响是下列因子的函数[6]:卫星高度角ε、减弱因子α、载波频率的波长λ和天线高出地面点的高度H。
天线附近的粗糙度较小的平面、斜面和垂直面,都会使GPS信号发生镜反射,发生多路径效应,产生多路径误差。
2舰载多站GPS定位法
由于这种实际测量问题的存在,摆在现实中的难题就是找到一种测量方法,这种方法既能避开高反射环境,又能实时高精度测量出基准点的点位数据。经过深入的分析研究,建立了一个准确可行的数学模型,通过合理布阵GPS接收机,避开了武器装备基准点的GPS直接测量,从而消弱了基准点GPS测量产生多路径误差带来的影响[7],解决了武器装备基准点位置精度测量的难题。这样,该武器装备基准点测量的工程问题就转化为一个三维空间的几何求解问题。
2.1 GPS布站的测量模型
假设舰船上某武器装备基准点的空间坐标假设为p(x,y,z),在船上适当位置架设3台GPS接收机(目的是避开高反射环境下的基准点GPS直接测量),其天线中心位置分别为p1、p2、p3,且其空间坐标p1(a1,b1,c1)、p2(a2,b2,c2)、p3(a3,b3,c3)均可由GPS接收机测得;p1、p2、p3到基准点p的基线长可由全站仪激光测距精确测得,分别是pp1=r1、pp2=r2、pp3=r3。如图3所示。
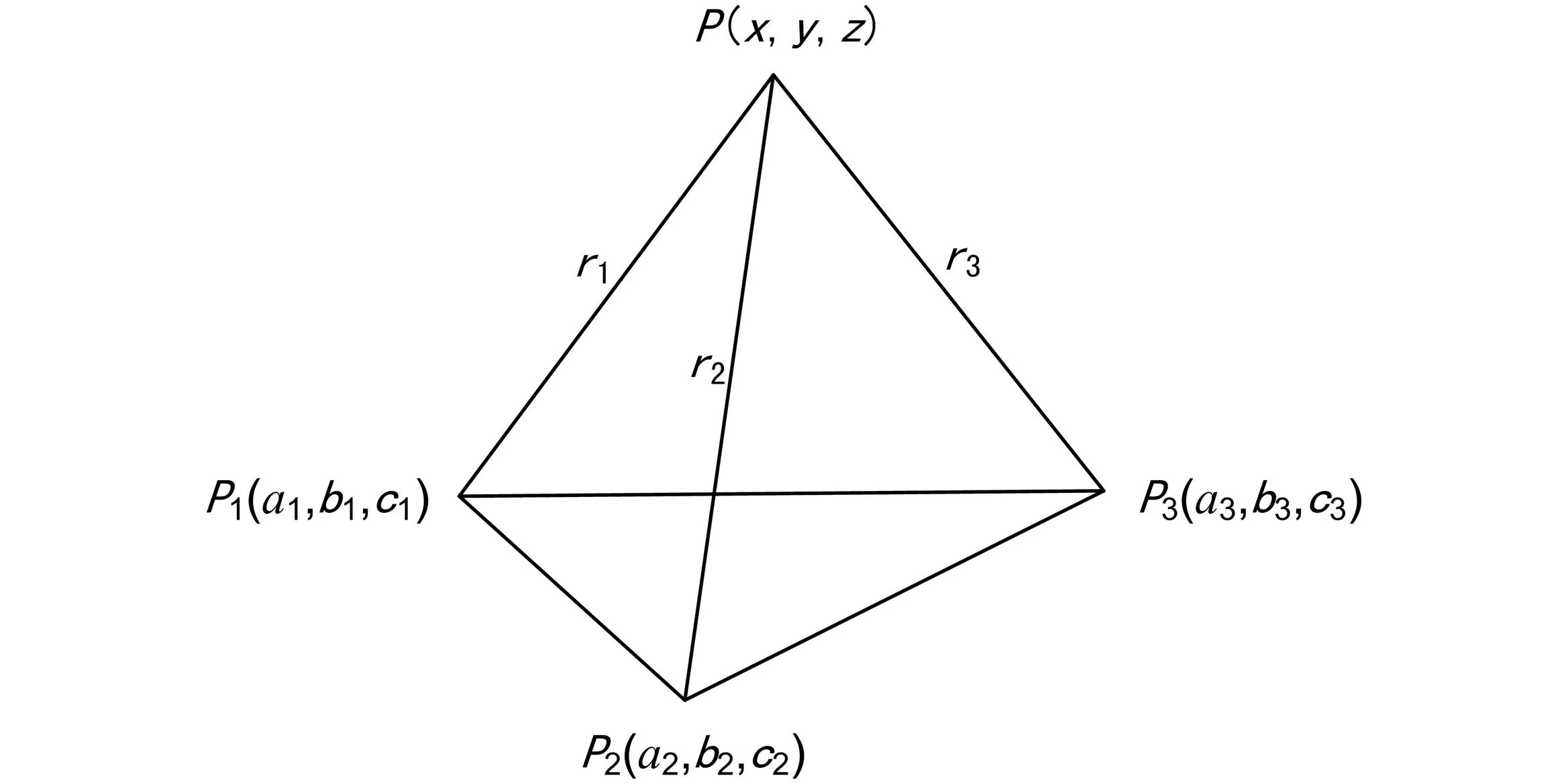
图3 GPS接收机布站示意
则根据空间中任意两点间的直线距离公式,可建立解算武器装备基准点p的空间坐标的数学模型如下:
(x-a1)2+(y-b1)2+(z-c1)2=r12,
(x-a2)2+(y-b2)2+(z-c2)2=r22,
(12)
(x-a3)2+(y-b3)2+(z-c3)2=r32。
方程组式(12)可进行迭代求解,可写为:


(13)

这里:
F1(x,y,z)=D1(x,y,z)/D,
F2(x,y,z)=D2(x,y,z)/D,
F3(x,y,z)=D3(x,y,z)/D。
而:
D=a1b2c3+a3b1c2+a2b3c1-a3b2c1-a1b3c2-a2b1c3,
D1(x,y,z)=f1b2c3+f3b1c2+f2b3c1-f3b2c1-f1b3c2-f2b1c3,
D2(x,y,z)=a1f2c3+a3f1c2+a2f3c1-a3f2c1-a1f3c2-a2f1c3,
D3(x,y,z)=a1b2f3+a3b1f2+a2b3f1-a3b2f1-a1b3f2-a2b1f3。
式中,
f1(x,y,z)=(x2+y2+z2+a12+b12+c12-r12)/2,
f2(x,y,z)=(x2+y2+z2+a22+b22+c22-r22)/2,
f3(x,y,z)=(x2+y2+z2+a32+b32+c32-r32)/2。
对方程组式(13),可给定一个点位初值(x[0],y[0],z[0])T,以及具有一定精度的ε,使

成立时迭代结束。
2.2 测量实施方案
测量实施方案采用4台GPS接收机进行舰载武器装备基准点测量工作。其中3台GPS接收机分别放置在舰船上合适位置,记录其GPS接收机天线位置的实时测量定位数据,用以参与数学模型中武器装备基准点的解算。一台GPS接收机放置岸边GPS基准站点上,记录基准站点位的GPS实时测量定位数据,用以参与3台GPS接收机数据的差分解算[8]。
实际测量过程中,要求4台GPS接收机型号和数据采样频率相同并且同时进行测量工作,这样保证舰载GPS接收机的数据差分解算工作和基准点点位的空间几何数学模型求解工作。
要求全部GPS接收机设置最低卫星高度角的参数为15°。大量实际试验表明最低卫星高度角的参数为15°时可提供最佳测量结果,增大卫星高度角可提高相位观测值的精度,但与此同时,所测卫星图形强度也将变弱,从而导致坐标精度降低。降低卫星高度角,可能得出更小的RMS值,但此时对流层误差的影响会特别严重,将得不偿失。
2.2.1GPS接收机点位的选取
岸上GPS基准站点位的选取工作,要根据舰船的航路来确定。其目的是使舰船的整个航路始终处于保证该基准站GPS接收机与舰载GPS接收机的差分处理精度的范围内。
舰载GPS接收机天线中心的选取工作,要根据数学模型,合理布局GPS接收机天线位置,避开高反射环境。天线最好选择放置船艏、船艉或上方及侧面无遮挡物的空旷处的合理的位置,其目的是使三台舰载GPS接收机天线中心位置与武器装备基准点形成一个良好的空间几何图形。这样,既便于减少迭代次数,提高解算精度,又能方便全站仪激光测距顺利准确工作。
选择具有零相位且多路径误差影响较小的MarAnt微带天线,有条件的情况下,还可以在天线下设置抑径板或抑径圈。这样,增强了接收机天线抗衡反射波的能力,尽可能避开高反射环境,防止卫星信号的反射信号进入GPS接收机天线产生多路径误差[9]。
2.2.2GPS接收机基址标定
利用高精度的全站仪激光测距,进行舰载GPS接收机天线中心基址的标定,分别精确测得GPS接收机天线中心至该武器装备基准点的距离。
2.2.3基准点轨迹测量的实施
测量时,4台GPS接收机同时工作分别记录相应GPS天线中心点位的定位数据。利用基准站已知点位成果数据、4台GPS接收机实测定位数据和GPS数据处理软件对舰载GPS接收机数据进行差分数据处理,分别求得舰载GPS接收机天线位置的每一个采样时刻t实时定位数据。然后,再对每一时刻t的数据进行迭代,便可得到武器装备基准点p点关于时间t的点位坐标序列{p(x(t),y(t),z(t))},即为武器装备基准点的运动轨迹。
3结束语
在舰载武器装备试验过程中,现行的GPS测量手段不能很好地解决装备基准点处多路径误差带来的影响。提出了一种利用全站仪激光测距并合理布站GPS接收机,从而有效地消弱舰载武器装备基准点多路径误差的定位测量方法。该定位方法有效解决实际测量中由武器装备基准点周围多反射体高反射复杂环境导致的测量精度降低甚至GPS接收机信号失锁的问题,提高了舰载武器装备试验的测量精度,满足武器装备精度测量的要求。该方法经实际试验验证,精确、有效。
参考文献
[1]李天文.GPS原理及应用[M].北京:科学出版社, 2003.
[2]张志,袁建平.GPS多路径效应对空间飞行器的影响及补偿[J].西北工业大学学报,1996,14(2):285-289.
[3]刘大杰,施一民.全球定位系统(GPS)的原理与数据处理[M].上海:同济大学出版社,1997.
[4]张守信.GPS卫星测量定位理论与应用[M].长沙:国防科技大学出版社,1996.
[6]王广运.差分GPS定位技术与应用[M].北京:电子工业出版社,1996.
[7]杨革文.探测跟踪系统低空多路径模型的研究[J].上海航天,2004,21(4):48-53.
[8]刘基余.李征航.全球定位系统原理及其应用[M].北京:测绘出版社,1995.
[9]徐绍铨.GPS测量原理及应用[M].武汉:武汉测绘科技大学出版社,1998.
任绍俊男,(1976—),工程师。主要研究方向:无线电测量。
秦亮亮男,(1980—),助理工程师。主要研究方向:无线电测量。
Research on an Effective Positioning Method of
Eliminating Multi-path Error
REN Shao-jun,QIN Liang-liang
(Unit91550,PLA,DalianLiaoning116023,China)
AbstractThe multi-path error is one of main errors in the high-precision and short-baseline GPS measurement.The classical GPS measuring method can’t meet the requirement in the ship weaponry test.The influence of multi-path error on the observation results of GPS measurement is discussed.In this paper,an effective positioning method is proposed to eliminate the multi-path error.It is combined by the GPS technology and the total station instrument technology together to make use of their advantages and obtain high-precision measuring result.The precise positioning mathematical model and detailed measurement scheme are presented.The experiment results show that this method can satisfy the requirement of precision measrement in the ship weaponry test .
Key wordsGPS;baseline;multi-path error;total station instrument
作者简介
收稿日期:2015-03-10
中图分类号P228.4
文献标识码A
文章编号1003-3106(2015)06-0081-04
doi:10.3969/j.issn.1003-3106.2015.06.22
引用格式:任绍俊,秦亮亮.一种有效消弱多路径误差的定位方法研究[J].无线电工程,2015,45(6):81-84.
