改进的LMS算法在噪声对消中的应用
2015-02-22陈立伟谭志良崔立东
陈立伟,谭志良,崔立东
(军械工程学院,河北 石家庄 050003)
改进的LMS算法在噪声对消中的应用
陈立伟,谭志良,崔立东
(军械工程学院,河北 石家庄 050003)
摘要针对最小均方误差(Least Mean Squares,LMS)算法收敛速度和稳态失调之间的矛盾,在已有算法的基础上进行3个方面改进:利用误差信号自相关性对不相关噪声进行抑制、将步长设置为先固定后自适应,提高算法的收敛速度、减小稳态误差;调节步长因子中固定的参数,使其伴随步长变化进行调节,进一步减小稳态误差。将已有算法与改进算法同时用于Matlab仿真实验,仿真结果表明,新算法具有更快收敛速度、更小稳态误差和良好的消噪能力。
关键词LMS算法;稳态误差;自适应噪声对消;收敛速度
0引言
目前的滤波器有固定和自适应2种,由于信号和噪声的先验知识难以获得,自适应滤波器在噪声对消中便有了重要的研究价值。自适应滤波器的核心是自适应算法。最常用的滤波器是由Windrow提出的横向滤波器结构[1,2],算法采用LMS算法。LMS算法因其简单、易于实时实现等,被广泛应用于系统辨识、信号处理、噪声抵消等领域。目前对于LMS算法的研究主要集中在算法的收敛速度和稳态失调2个方面[3],但这2个指标相互矛盾,针对其中的矛盾很多学者对LMS算法提出了多种改进方案。文献[1-10]都是对步长迭代函数进行了改进[4-7],文献[4]提到了正弦函数变步长算法,文献[6]提到了改进的Sigmoid函数变步长LMS(SVSLMS)算法等,相对比传统的固定步长的LMS算法都有了很好的性能。
本文基于文献[4,6]中对LMS算法研究的基础之上,对2种变步长算法进行分析并提出新的步长函数。新步长函数采用分段函数,在开始阶段采用固定步长,利用较大的步长提高算法的收敛速度;在信号处于收敛稳定后,利用新加入的三角函数因子使滤波结果产生了更小的稳态误差。Matlab仿真结果表明,新算法的滤波效果有较大改善。
1算法原理
1.1 基本LMS算法
基本LMS算法的迭代公式为:
e(n)=d(n)-x(n)·w(n),
(1)
w(n+1)=w(n)+2·u·e(n)·x(n)。
(2)
式(1)中,e(n)、d(n)、x(n)和w(n)分别表示迭代次数为n时的误差信号、期望信号、输入信号和滤波器的权系数。式(2)中表示抽头权向量的更新公式。由步长调整的原则可知:在收敛的初始阶段采用较大步长得到快速的收敛,待到收敛阶段则采用较小的步长减小稳态误差。迭代后的收敛条件是0<μ<λmax。
LMS算法在自适应滤波原理应用过程中,因输入端引入的干扰噪声引起相应的失调噪声,而减小步长因子可以很好地抵制稳态失调量,这就以牺牲收敛速度为代价。因此在固定步长的情况下,既要求有快速的收敛速度,又要求有较小的失调量,二者之间互相矛盾。为了克服其中的矛盾,现有的算法在固定步长的基础上提出了变步长算法,其优点是在收敛的初始阶段对应步长较大,在误差变上的时候步长也较小,从而获得良好的性能。
1.2 改进的LMS算法[8-15]
文献[4]中引入了基于正弦函数的步长更新公式:
u(n)=a·(1-(sin (b·e2(n)/(b·e2(n))))。
(3)
文献[6]中引入了基于Sigmoid函数的步长更新公式:
u(n)=a·(1-exp(-b·e2(n)))。
(4)
可以看出2种步长函数都相对简单、易于实现,利用a参数控制步长的大小,利用b参数调整步长的变化率。这2种算法在收敛稳定后仍然有缓慢的变化,因此,对于噪声仍然比较敏感。
本文基于2种算法提出新的步长因子:
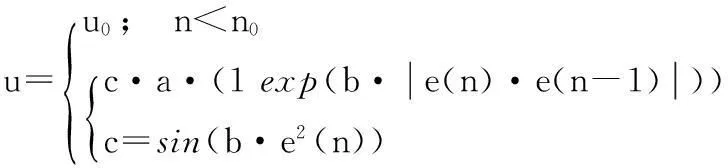
(5)

u(n) =a·( 1-exp(-b·e2(n)))。
在此基础上,引入参数a的函数,其在误差变化的同时也会相应的变化,在开始的时候较大,随着误差和步长的减小而减小。
2自适应噪声消除原理
基本的对消器原理如图1所示,信号s沿信道传到接收该信号的传感器,除收到信号外,传感器还收到一个不相关的n0,组合信号s+n0组成对消器的“原始输入”。第2个传感器用来接收与信号不相关的、但以某种未知的方式与噪声n0相关的噪声n1,这个传感器给对消器提供“参考输入”。将噪声n1加以过滤,使其产生近似为n0的复制品输出y。将该输出从原始输入s+n0中减去,就产生系统的输出s+n0-y。

图1 自适应对消原理
假定s与n0和n1均不相关,但n0与n1相关。输出为:
e=s+n0-y,
(6)
e2=s2+(n0-y)2+2s(n0-y)。
(7)
将上式两边取期望,并考虑到s与n0及y不相关,得到
E[e2]=E[s2]+E[(n0-y)2]+2E[s·(n0-y)],
(8)
E[e2]= E[s2]+E[(n0-y)2]。
(9)
当调节滤波器使E[e2]最小时,则E[(n0-y)2]也达到最小。相应的最小输出为:
E[e2]min=E[s2]+E[(n0-y)2]min。
(10)
所以,滤波器之输出y即为原始噪声n0的最佳均方估计。进而,当E[(n0-y)2]最小时,从式e=s+n0-y中可以看出E[(e-s)2]也达到最小。理想情况下y(n)=N(n),e(n)=s(n)。
3自适应噪声消除的仿真
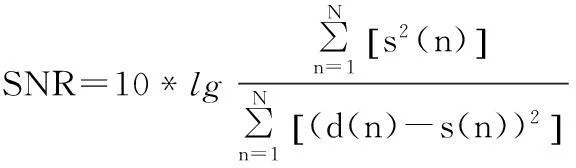
通过Matlab环境进行自适应噪声抵消仿真实验,自适应FIR滤波器的阶数为2,输入信号s(n)=sin(2·π·n),噪声信号为标准的高斯白噪声。分别利用如下4种步长因子对噪声进行消除,通过结果比较不同步长因子的性能。利用信噪比公式分别对4种算法处理后的信号进行信噪比计算,比较结果。
信噪比公式:
算法1:固定的步长迭代方程
算法2:步长迭代方程
u(n)=a·(1-(sin (b·e2(n))/(b·e2(n))))。
算法3:步长迭代方程
u(n)=a·(1-exp(-b·e2(n)))。
算法4:步长迭代方程

通过大量的实验找出每种算法最优参数如表1所示。

表1 4种变步长LMS算法参数
首先在输入信号为已知矩阵的情况下对上面的4种步长函数进行对比研究,展现LMS算法平均权向量的收敛性,结果如图2所示。

图2 不同算法自适应处理器性能表面等高线与权值轨迹
由图2中性能表面中等高线的均方误差从外到内分别为37、23.8、13.6、6.3、2、0.48和0.18,4种不同的步长迭代方程的权值都收敛于最佳权值,而第4种算法的步长函数在开始阶段有较大的步长,所以可以用较少的迭代次数达到相同的均方差值,即有较快的收敛速度,而且相比其他3种函数更好的收敛于最佳权值。
4种步长迭代方程算示的学习曲线分析如图3所示。这4种算法在迭代次数分别为150次、100次、60次和40次左右达到收敛,从稳态失调性并不明显的情况下收敛速度快于其他3种算法。
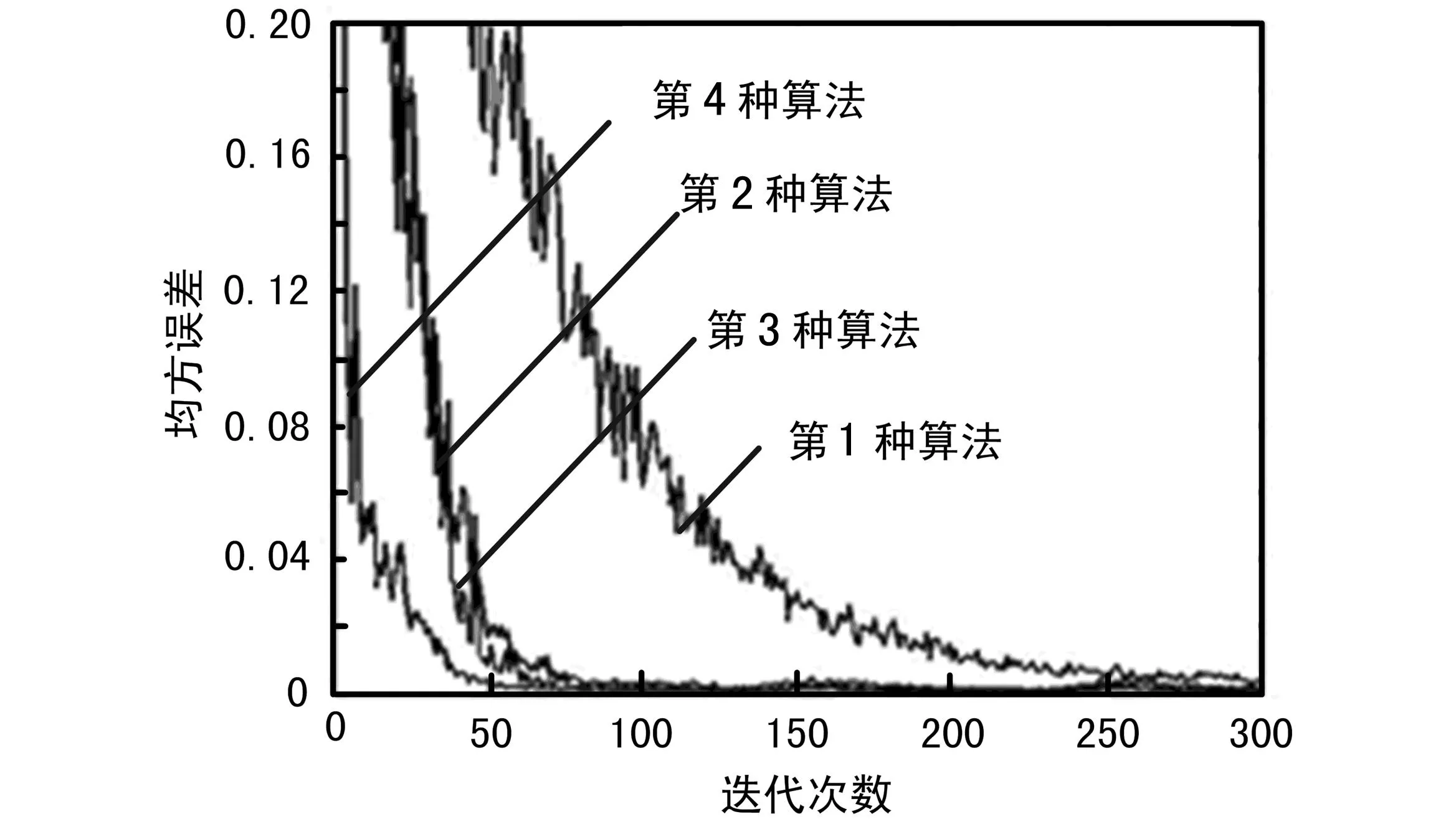
图3 4种不同算法的收敛曲线分析(输入信号(SNR=1)
4种算法自适应噪声对消处理结果如图4所示,第4种算法在收敛之后的稳太失调性相比其他3种算法有一定的减小。

图4 4种算法自适应噪声对消处理结果
4种算法对信号处理后的信噪比分别为46.2、52.4、48.8和60.9。4种算法噪声对消结果如表2所示。

表2 4种算法噪声对消结果
综合仿真结果表明,新算法相比之下有更好的噪声抵消效果。
4结束语
为了提高LMS算法的性能,基于前人研究的基础上,利用较大的固定步长来缩短算法的收敛时间;通过加入新的三角函数因子使算法在收敛产生更小的失调量。Matlab仿真分别从3个方面对算法进行了验证。实验得出结果证明,新算法收敛速度比旧算法快了15次迭代过程,具有较小的稳态失调噪声,同时信噪比提高12 dB,更好地对噪声进行了抵消。
参考文献
[1]卢炳乾,冯存前,龙戈农.一种基于正弦函数的归一化变步长LMS算法[J].无线电工程,2014,44(3):21-23.
[2]陈宝文,韩军,张航.基于RLS算法的记忆多项式预失真技术分析[J].无线电通信技术,2011,37(6):43-46.
[3]陈亮,张超,张晓锋.LMS自适应算法的FPGA设计与实现[J].微计算机信息,2012,28(7):14-15.
[4]朱柏辉,黄业开,王静,等.LMS自适应噪声抵消算法的DSP脉搏血氧监测研究[J].中国医学物理学杂志,2013,30(2):4 041-4 046.
[5]田文科,王剑,山秀明.PCMA自适应自干扰对消算法与仿真[J].电迅技术,2011,51(9):78-82.
[6]杨宇,施未来.变步长LMS自适应滤波算法研究[J].江苏教育学院学报,2011,27(1):9-10.
[7]马二涛,李建海,刘保华,等.改进变步长LMS算法在系统辨识中的应用及性能分析[J].现代电子技术,2010(6):145-148.
[8]龙戈农,童宁宁,李洪兵,等.改进的LMS算法 及其在雷达干扰对消系统中的应用 [J].空军工 程大学学报,2010,11(5):31-33.
[9]李梅,李文杰,姚善化.改进的变步长LMS自适应滤波算法及仿真[J].电测与仪表,2010,47(554):15-17.
[10]贺洪江,王春霞.一种新的LMS自适应滤波算法分析仿真研究[J].传感器与微系统,2012,31(3):15-17.
[11]梁青,段小帅,陈绍青,等.基于滤波x-LMS算法的磁悬浮隔振器控制研究[J].振动与冲击,2010,29(7):201-203.
[12]陈昊,王永,李嘉全,等.基于饱和约束LMS算法的磁悬浮隔振器控制研究[J].振动与冲击,2012,31(13):125-128.
[13]李竹,杨培林,行小帅,等.一种改进变步长LMS算法及其在系统辨识中的应用[J].仪器仪表学报,2007,28(7):1 340-1 344.
[14]高辉,徐龙祥.基于LMS算法的磁悬浮轴承系统振动补偿[J].振动工程学报,2009,22(6):583-588.
[15]朱亮,韩方景,张尔扬,等.基于FPGA的定点LMS算法的实现[J].国防科技大学学报,2005,27(4):62-65.
陈立伟男,(1990—),硕士研究生。主要研究方向:电磁兼容与防护研究。
谭志良男,(1964—),博士,教授。主要研究方向:电磁兼容与防护研究。
An Improved LMS Adaptive Filtering Algorithm for
Adaptive Noise Cancellation
CHEN Li-wei,TAN Zhi-liang,CUI Li-dong
(OrdnanceEngineeringCollege,ShijiazhuangHebei050003,China)
AbstractTo address the issue of contradiction between convergence rate and steady-state error of the LMS algorithm,an improved LMS algorithm is proposed.The new algorithm makes three improvements based on the existing algorithms:using the autocorrelation of error signals to suppress uncorrelated noise;setting the first step adaptive after a fixed one to improve the convergence rate and reduce the steady-state error;regulating the fixed parameters in the step factor and making them be adjusted as the step changes to further reduce the steady-state error.Both the existing algorithm and the improved algorithm are applied in the simulation experiment of adaptive noise,and the results show that the new algorithm has advantages of faster convergence and less steady-state error,as well as good noise cancellation capability.
Key wordsLMS adaptive filtering algorithm;steady-state error;adaptive noise cancellation;convergence rate
作者简介
收稿日期:2015-03-17
中图分类号TN924.6
文献标识码A
文章编号1003-3106(2015)06-0070-04
doi:10.3969/j.issn.1003-3106.2015.06.19
引用格式:陈立伟,谭志良,崔立东.改进的LMS算法在噪声对消中的应用[J].无线电工程,2015,45(6):70-73.