多元代价函数的组网雷达控制模块设计
2015-02-22李鲜武
李 川,李鲜武
(中国电子科技集团公司第二十研究所,西安710068)
多元代价函数的组网雷达控制模块设计
李川,李鲜武
(中国电子科技集团公司第二十研究所,西安710068)
摘要:针对现代战场隐身飞机探测发现的需要,需要采取不同体制的雷达进行组网,而组网系统的核心在于实时控制网内各雷达。本文旨在设计一套包含传感器不同阶段的工作方式和控制模式,通过可控资源,实时再分配,使网内各雷达能提早发现隐身目标,并快速建航,使融合处理的精度最优,并由此提出组网雷达控制模块的处理方法和控制流程。通过仿真验证了多元代价函数的相关算法和处理流程的有效性,为后续科研提供可操作依据。
关键词:组网雷达;多元代价函数;协方差矩阵;检测概率;覆盖系数
0引言
随着数据处理技术和网络化技术的不断发展,利用组网雷达解决威胁目标检测不到、看不远、解析决策能力差就成了一个新的突破点。而如何将网内不同体制、不同频段、不同模式的多种雷达的资源协同管理、统一调配就成了其中最重要的关键技术。利用单个雷达对目标的战技指标可以推广出多雷达协同的相应指标,由此可以根据这些指标选出合理的代价模型进行最优配置求解。本文将着重介绍组网雷达内如何利用各传感器的属性和资源,对威胁目标尽行进行协同探测,达到最佳的搜索和跟踪效果,并给出一种基于多元代价函数的协同控制模块的设计和实现过程。
组网雷达是指通过将多部不同体制、不同频段、不同工作模式、不同极化方式的雷达或者无源侦查装备集合起来,在适当区域的位置进行布站,并借助无线通信手段链接成网,通过协同控制中心统一资源调配而形成的一个有机的整体。网内各雷达和无源侦查装备的目标探测信息,包括原始信号、点迹、航迹等,由协同控制中心完成收集,并利用综合的数据融合技术综合处理后形成雷达网覆盖范围内的情报信息,以及点航迹的观测与跟踪信息,并按照战争的战术态势变化,能自适应地调整网内各设备间的工作状态,发挥各个装备的优势,从而完成对整个覆盖范围内的探测、目标识别和跟踪等任务[1]。
多元代价函数的原始定义是指为实现某个目的或者一件事情的某个结果,对涉及该目的或者该事情的各个元素进行综合考虑,优化量值得到最优的结果。在组网雷达系统中,需要综合考虑网内雷达的搜索、跟踪等状态的形成过程,综合运用其中各个传感器的综合效能,达到最优搜索探测、最佳跟踪效能的目的[2]。
1实时控制模块优化模型
1.1 代价函数一般优化模型
如果存在有Ns个雷达组成的雷达组网系统S={1,2,…,Ns},定义对应着单个传感器的资源代价为R={r1,r2,…,rNs}。令集合D(tk)为传感器集合S的一个子集合,表示在tk时刻所有可能被分配观测任务的传感器集合。传感器对目标的搜索和跟踪阶段的期望值和考察值是不一样的,因此统一设定对目标观测的期望值为P0。那么在当前时刻的传感器分配结果为D(tk)所付出的代价可表示为[3]
(1)
式中,P(tk|D(tk))表示在tk时刻选取传感器集合D(tk)后得到的该目标在该状态的观测矩阵;函数ψ(A,B)表示两个矩阵A,B之间的差异度量值;φ(D)为D中所有传感器资源代价和;α,β分别为观测代价和资源损耗代价,有α+β=1。根据代价函数期望总代价最小的原则,得出传感器管理的优化模型为
(2)
上式中矩阵差异性度量函数ψ可以根据实际需要,比如组网雷达系统中的雷达目前所处的状态或者雷达参数可以有多种选择。
下面着重讨论组网雷达系统对目标搜索、跟踪各个时段的效能最优因素。
1.2 协同搜索阶段的处理
在组网雷达系统的协同搜索阶段,一般对网内多雷达的空间覆盖能力、探测威力、抗干扰能力、信号覆盖能力、检测概率等以传感器自身性能为主的能力建立统一的评估模型,对系统探测性能进行统一规划。其中,最具有量化效能的是检测概率的估算和空间覆盖系数的计算。
(1) 协同检测概率
组网雷达系统协同搜索的特点是在信息共享的基础上,利用确定的信息融合规则,实现对目标的联合探测、跟踪[4]。然而,目前对多传感器的协同搜索研究主要侧重于实现目标的精准定位,而对目标的协同探测的研究往往是将各传感器对目标的发现概率进行简单的组合。常见的Pd计算模型为
假设n部雷达对同一目标的检测概率分别为Pd1,Pd2,…,Pdn,各雷达在其检测概率一定的值时才输出点迹。在此条件下,对各雷达输出点迹进行综合数据处理,则对该目标的协同等效检测概率为[5]
(3)
在搜索阶段,协同探测概率是表征了多传感器对于目标信噪比以及探测威力的一个度量值,也是组网雷达系统探测规划的首要考虑因素。当产生的点迹尚未建航时,可以通过实时计算每个传感器对于每个目标的探测概率来确定对于目标反射的信号幅度的强弱,从而通过实时调整保证对目标的探测概率以使传感器网内各雷达尽快产生航迹。
(2) 空间覆盖系数
空间覆盖系数是把组网雷达系统内各个传感器和目标的配对关系看作一个单一覆盖的问题,因此需要从任务所给定的协同探测区域进行一些分析[6]。
首先,从覆盖的连续性与严密性,引入用盲区系数表示覆盖的连续性,定义为
(4)
式中,∑ABL是组网雷达系统各雷达探测盲区的面积和,A0是要求的雷达网协同探测区域的总面积。
同样,可以利用覆盖系数Cov的概念表征覆盖严密性定义:
(5)
式中A1,A2,…,Ai是雷达组网系统内雷达各自在责任区内的覆盖面积,则空域平均覆盖系数定义为网内所有雷达在M个高度层上覆盖面积的平均值之和与雷达网责任区的总面积之比。
(6)
式中A1,A2,…,AM为雷达网内所有雷达在M个高度层上覆盖面积的平均值。
(3) 建立优化模型
在考虑协同探测概率(P协同)和空间覆盖能力(Cov)所建立多元代价函数的模型,其意义在于可以较为直观地反映组网雷达系统协同探测网络对目标的探测效能。
因此,从给定的协同探测区域的角度来说,一方面要获得最大的探测区域,另一方面又要关注重点探测区域Score,既要获得最大的平均覆盖系数Rguard,又要获得最大的重点区域覆盖系数Rcore。通常,要同时满足上述两个方面的要求,不一定能做得到。但是,能够选择一种最优的方案,使获得的最大探测区域S,最接近所要求的警戒空域Sguard。同时,使所获得的重点探测区域Score最符合实际情况下所需要的重点探测区域Cguard,使Rguard和Rcore趋向于最大。使用加权合成的方法,将多目标函数优化问题转化为单目标函数优化问题。建立协同探测区域的性能综合评估模型如下:
(7)
其中,w为选取的权系数,取值在0~1。将组网雷达系统探测视为二元检测。设组网雷达系统内有N个独立观察的传感器,每个传感器都做出一个局部判决ui(i=1,2,…,N),其中
(8)
令协同控制中心采取基于雷达资源代价最小化的决策规则:
(9)
其中,w为上文参数相关的权系数,cij表示当Hj成立时全局判决是Hi时的代价,η为进行综合判决的阈值。以上就是在组网雷达搜索阶段所建立的基于检测概率和覆盖能力的代价函数。
1.3 协同跟踪阶段的处理
在组网雷达系统的跟踪阶段,度量的标准就是目标航迹产生的精度问题。通常用目标跟踪误差的协方差表征来估计航迹产生的精度。在跟踪系统中,预先设定一个期望的协方差,表示期望的跟踪精度。这个期望的协方差与主要威胁目标的优先级因素等有关。当目标跟踪状态的真实协方差与期望的协方差满足一定关系时,认为跟踪目标精度达到要求。为此需要一个表征期望协方差阵与真实协方差阵关系的度量方法。
基于协方差控制的一般过程可以由图1表征[7]。
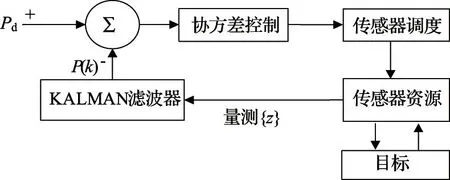
图1 传感器跟踪阶段的协方差控制原理
为解决以上问题,首先需要一个数学模型来描述传感器与目标的配对关系。这里定义目标-传感器选择矩阵Xt,矩阵Xrt的列表示目标,传感器的行表示传感器。如果目标Ti落入传感器Rj的威力范围内,则可以目标Ti与传感器Rj就构成一种可能的配对选择。这样在目标-传感器Rj选择矩阵Xt中将相应行和列的值设为1;如果目标Ti没有落在传感器Rj的威力范围内,则矩阵Xt中将相应行和列的值设为0。
(10)
其中
(11)

采用卡尔曼滤波进行协方差矩阵的运算,则跟踪阶段的效能Ef可以按照如下顺序得出:假设目标i对传感器j的量测误差协方差矩阵为Sij。如果用传感器i去跟踪目标j,则可以用量测误差协方差矩阵为Sij去近似地预测传感器i对目标j的跟踪精度。量测误差协方差矩阵为Sij的迹越小,对应的跟踪误差就越小,反映的跟踪精度就越高。为了获得效能最大值,取
(12)
则效能函数Ef函数如下:
(13)
通过传感器网络化管理与控制处理,求出使效能函数Ef为最小的目标-传感器分配矩阵Xrt。因此,只需采用优化算法,即可求出最优解。
2实时控制模块的设计
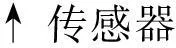
传感器实时控制模块需要将传感器资源全部掌握(感知到),进行统一调配。在组网系统中,实时控制模块作为组网系统雷达中枢对各个雷达进行直接控制[8]。例如,在下面一个仿真系统设计中,组网雷达系统实时控制模块与其余模块的关系,如图2所示。
图2 仿真系统设计中的控制模块
图2中,任务和想定模块向传感器实时控制模块提供相应的任务参数、已知的各个雷达参数及关于目标的粗略参数。有n个雷达节点实时输出各自对目标探测的回波信号信息、点迹信息及其航迹信息等数据,并接收来自实时控制模块的控制信息。评估模块将输出组网雷达系统融合所需要的真值和阀值数据,包括仿真系统的目标点航迹的评估值,对传感器实时控制模块的决策信息产生相应作用。数据处理模块输出多传感器的最终点航迹融合信息和信号融合信息,结果再传输给实时控制模块。
这个仿真系统设计的基本思想是在目标尚未出现时,根据任务要求和簇内的雷达节点分布,以全区域无缝覆盖和重点区域覆盖的原则,依次对簇内雷达进行区域、时域、频域规划部署,保证区域覆盖的严密度[9]。这期间,除了对防区的位置布站要求外,主要部署的代价函数则由以上建立模型中的平均区域覆盖系数和重点区域覆盖系数给出。接下来的主要工作则是需要根据实时作战的要求,能灵活地调配出最优权系数,保证对战区的有力覆盖。而在隐身目标被协同探测到并从信号融合至点迹融合的全序情况下,根据任务和簇内雷达的分布情况(已知),以及各个雷达对隐身目标的标称检测概率和实测检测概率,建立一个基于传感器-目标的矩阵,利用多元代价函数模型的最优化分析方法,得出基于整个目标集合的最优效能的分配矩阵。
3实时控制模块的仿真结果
3.1 仿真基本参数和设定
仿真系统设计将设有4个站点,布站坐标分别是雷达1(0,21.65)、雷达2(12.5,0)、雷达3(0,-21.65)和雷达4(0,-12.5)。初始雷达1的坐标对应经纬度和高度是(118°,38°,10m)。在所要求的探测区域内,假设有2个目标的初始坐标为:目标1(经度118.0006°,纬度37.9986°,高度6000m),目标2(经度117.7543°,纬度37.8897°,高度6000m)。目标运动状态是匀加速直线运动、匀加/减速和圆周运动等,目标运行时间总长设为1000s。
在组网雷达系统中,这个实时控制模块主要完成协同搜索、跟踪等目标时段下,分别采用多元代价函数模型,对所有资源进行合理分配。根据模型分析,仿真系统分别验证以下3种结果。
采用matlab仿真软件,主要考虑在4个雷达布阵情况下对两个目标的探测,并在其搜索、跟踪条件下分别采用前文所述的多元代价函数对其资源进行合理分配,进行模块设计的功能的实现。根据上文分析的雷达在各种情况所出现的性能代价函数,分别验证协同搜索代价函数和协同跟踪代价函数的仿真情况:
3.2 协同搜索的代价函数反馈
在协同搜索状态下,组网雷达系统代价函数反馈是基于检测概率和目标覆盖系数。根据上述对传感器空间覆盖系数的模型计算,结合雷达参数的确定对该区域内的平均覆盖系数和重点覆盖系数作出统计,见表1。
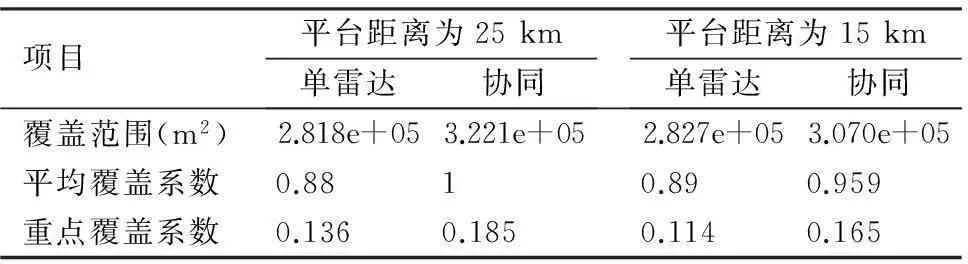
表1 组网雷达协同搜索代价函数相关指标比较
从表1可以看出,在协同条件下相邻两雷达布站间距越远,其覆盖能力越强。在协同搜索状态下,对目标探测任务主要是以快速发现为主。主要考虑各个传感器的检测概率和覆盖系数,组成了多元代价函数所计算出的协同检测概率与虚警率和信噪比的得益。这些参数之间的固有关系,例如:当其中一部雷达能持续观测同一目标时,其虚警率将会在一定时间内是固定的。根据这一关系就可以仿真出雷达探测距离(信噪比、虚警率)和雷达检测概率之间的对应关系,见表2(其中横标为信噪比)。
组网雷达系统综合判决的阈值(检测门限):协同检测概率达到50%即认为发现目标,检测概率达到80%即认为稳定跟踪目标。根据实测信噪比和空域覆盖系数的计算,所建立的多元代价模型可以感知网内各节点雷达的工作状态,并实施自适应控制——基于协同检测概率的传感器分段控制情况,见表3。

表2 组网雷达探测信噪比、虚情率与检测概率之间的关系

表3 基于协同检测概率的传感器分段协同控制情况
从表3可以看出,在仿真场景运行的0~300 s阶段,部署两部雷达对两个目标进行探测。两部雷达对目标的检测概率都不足以稳定跟踪目标。因此,在300~600 s区间内4部雷达检测概率均不能达到50%的发现目标情况下,控制模块将自适应调用并增加了雷达3去观测两个目标,使得系统协同检测概率提高,达到了可快速形成目标航迹的结果。该结果说明:协同控制中心采取基于检测概率和覆盖系数的代价函数和综合判决的阈值,并按以上模型式(9)中所建立的资源代价最小化的决策规则,在组网雷达协同搜索阶段,调配出了最优权系数。
3.3 协同跟踪的代价函数反馈
在协同跟踪状态下,组网雷达系统代价函数反馈是基于目标精度的协方差矩阵的控制反馈。采用直观的精度比较方法,比较UKF滤波方法后,传感器对于目标量测的精度也就是协方差矩阵的控制反馈。
图3的仿真结果是4部雷达对目标1在x-y-z坐标系中量测与真值间的误差。
目标1在230 s时段时,融合航迹的误差开始变大,这时控制模块能实时对网内传感器进行再分配,就出现了如图4所示的基准传感器变更跟踪情形的控制。这是依照所采取雷达-目标配对模型处理,完成对传感器-目标的实时再分配情况。
图4中,通过实时再分配,已形成了新的跟踪方案。仿真结果是目标1在整个时段的航迹质量统计结果——即传感器融合精度转换到经度、纬度、高度上的值,如图5所示。由于实时再分配,通过验证多传感器融合系统的航迹质量,以验证是否满足跟踪精度的要求。融合航迹时间误差统计精度列入表4。
在这个阶段,传感器融合的精度转换到经度、纬度、高度情形如图5所示。由于实时进行了传感器管理控制,传感器对目标的感知程度均满足要求。
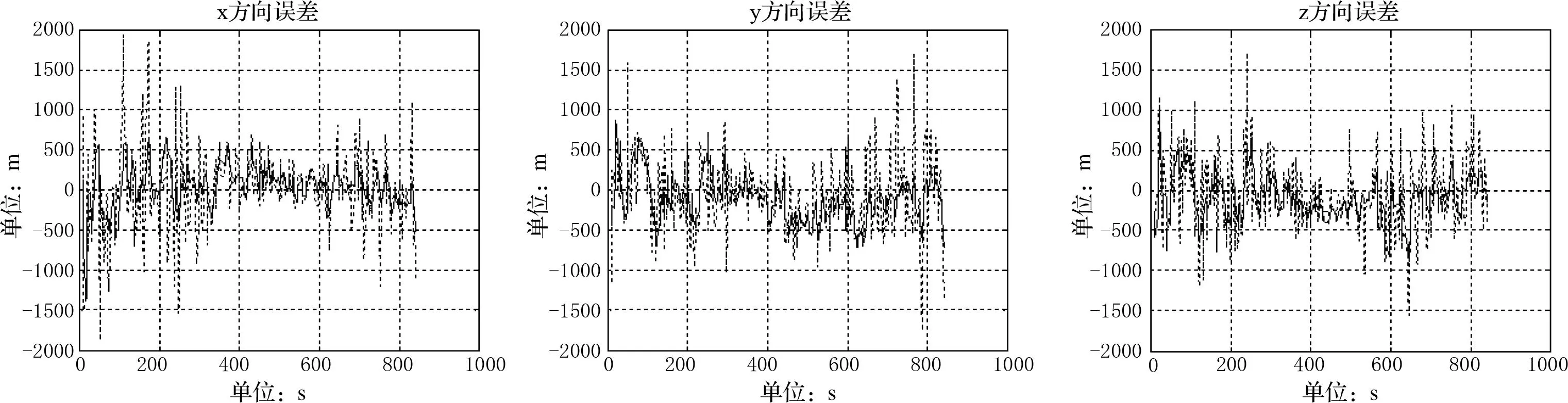
图3 在跟踪状态实时控制下融合航迹与真值在地心直角坐标下的比较
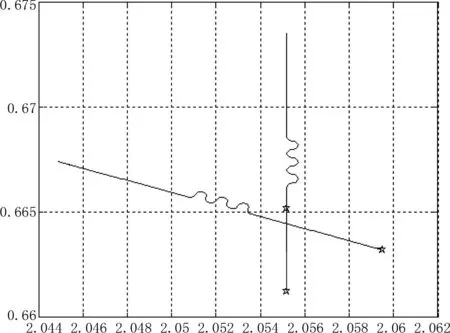
图4 在跟踪状态实时控制下目标分配情况
图6 整个阶段航迹质量的统计

时间段经度(m)纬度(m)0~250s2.996.054.8310.144.9612.078.2620.66250~500s2.753.983.915.823.976.646.5610.98500~750s2.492.804.014.153.665.576.078.86750~1000s2.332.703.984.423.665.205.348.70
4结束语
本文针对采取不同体制的雷达组网设计一套包含多传感器在不同阶段的工作方式和控制模式的实时控制模块。在组网雷达协同搜索阶段,建立了基于检测概率和覆盖系数及综合判决阈值等,获得多元代价函数的最优权系,使网内各雷达能提早发现隐身目标。在协同跟踪阶段,通过可控传感器资源,实时再分配,快速建立目标航迹,使融合处理的精度最优。通过仿真验证了相关算法和处理流程的有效性,能为后续科研提供方法依据。
参考文献:
[1]卢雪林,程望东.靶场脉冲测量雷达组网技术[J].现代雷达,2015(3):5-8.
[2]周文辉,胡卫东,余安喜,等.基于协方差控制的集中式传感器分配算法研究[J].电子学报,2003,31(12A):2158-2162.
[3]卢建斌,肖慧,胡卫东,郁文贤.基于代价函数的传感器管理算法研究[J].航天电子对抗,2007,23(3):61-64.
[4]贺志强,赵锋,赵帮绪,刘忠.王雪松.噪声干扰下雷达目标检测概率计算模型研究[J].现代防御技术,2012(1):119-123.
[5]EFishler,AHaimovich,R Blum,LCimini,DChizhik,RValenzuela.Spatial diversity in radars-models and detection performance[J].IEEE Transactions on Signal Processing,2006,54( 3):823-838.
[6]何友,修建娟,张晶炜,关欣,等.雷达数据处理及应用[M].北京:电子工业出版社,2008.3.
[7]宁忠磊,王宏琦,张正.一种基于协方差矩阵的自动目标检测方法[J].中国科学院研究生学报,2010(3):370-375.
[8]王鼎,等,一种均匀线阵幅相误差校正算法[J].雷达科学与技术,2009(4):289-295.
[9]莫海生,等,基于NLS的MIMO雷达方向图综合[J].雷达科学与技术,2008 (6):476-480.
Design of a control module based on multiple cost function
for netted radars
LI Chuan, LI Xian-wu
(No.20 Research Institute of CETC, Xi′an 710068)
Abstract:In order to detect the stealth aircraft on modern battlefields, various radars with different systems are required to be adopted and acted as a netted system whose core is to control each radar in real-time. A real-time control module is designed with the operating and control modes in different phases for multiple sensors. The controllable resources are redistributed in real-time to make multiple radars have the ability to detect the stealth targets early and initiate the tracks rapidly, and optimize the accuracy of the fusion processing. The processing method and control flow of the control module are proposed for the netted radar. The simulation results indicate that the relevant algorithm and processing flow based on the multiple cost function are verified to be effective, providing an operational basis for the subsequent scientific research.
Keywords:netted radar; multiple cost function; covariance matrix; detection probability; coverage coefficient
中图分类号:TN954.2
文献标志码:A
文章编号:1009-0401(2015)04-0001-06
作者简介:李川(1983-),男,工程师,工程硕士,研究方向:雷达中心机控制、雷达协同控制、协同作战等相关技术;李鲜武(1960-),男,研究员,研究方向:火控雷达。
收稿日期:2015-09-08