大型公务船加装深海探测设备的可行性分析
2015-02-21陈锐黄武刚
陈锐,黄武刚
中国舰船研究设计中心,湖北武汉430064
大型公务船加装深海探测设备的可行性分析
陈锐,黄武刚
中国舰船研究设计中心,湖北武汉430064
大型公务船如果具备一定的深海探测能力,可更好地执行任务。提出了通过加装深海探测设备使大型公务船获得深海探测能力的设计思想。分析总结深海探测任务的特点,明确了深海探测工作可划分为编制海图、测量海流、深海探测和可视确认4个流程,需要配备A型架、牵引绞车以及多种声学探测设备。并以某大型巡航救助船为例,结合船型特点和现有的布置条件,提出A型架和牵引绞车采用模块化安装方式,设置露天集中控制站,主要声学探测设备采用导流罩式的安装方式,超短基线采用自动收放系统,实现深海探测作业功能。最后分析了加装设备对重量重心、航速、稳性、浮态、人员居住、《船舶专用海水压载舱和散货船双舷侧处所保护涂层性能标准(PSPC)》顺应性和舷墙结构等总体性能的影响。研究表明:大型公务船加装深海探测设备合理可行,是快速获得深海探测能力的有效途径。
深海探测;科学考察;大型公务船;导流罩;多波束测深系统
0 引 言
为保护海洋环境、合理开发海洋资源、维护海洋权益,我国相关海洋行政主管部门均建立了公务船队[1]。近年来,随着国家海洋战略的不断加强,我国进入了一个快速建设公务船的时期。承担我国海洋行政执法任务的公务船必须增强全范围和常态化的执法维权能力,使用远航程、高海况条件的海事船、渔政船等远洋级公务船需求在不断加大[2]。
随着一些突发意外事件的发生,特别是马航MH370失联后的搜寻工作让我们意识到,搜救目标和手段不能仅瞄准海面,还应该扩展到海底深处。大型公务船如果具备一定的深海探测能力,就能更好地履行海上人命安全救生任务。
加装深海探测设备,是大型公务船快速获得深海探测能力的捷径。然而,在现有公务船上加装探测设备比之新设计专用的深海测量船难度更大。原因在于已建成的公务船在设计之初并未考虑到安装深海探测设备的需求,其船型的限制,可能不利于探测设备的安装,更有可能产生气泡从而影响到探测设备的工作。因此在加装方案的设计过程中必须紧密结合船舶的实际情况,考虑各方面的不利影响,综合权衡提出合理可行的设备配置以及安装形式,以使探测设备能够发挥较好的效能。
1 深海探测任务的需求分析
从上世纪60年代开始,发达国家率先向深海大洋进军,深海探测技术得以迅速发展[3]。目前,深海探测与地球深部探测、深空探测(简称“三深”探测),已成为未来地球科学领域人类科技的重要发展方向,并且很可能取得重大突破。
1.1 深海探测任务的流程
深海探测的内容和手段很多,就执行类似搜寻马航MH370的深海探测任务来说,一般要经历2个大的阶段。第1阶段是水上搜寻阶段,第2阶段是水下搜索阶段。水上搜寻的目的是明确或缩小水下搜索的范围,搜寻的目标是失事客机的漂浮碎片。从逻辑上来说,如果能快速找到确认的漂浮碎片,就有了残骸的重要线索,再辅助以天气条件、海流模拟技术等手段,可以反演推算出失事客机坠落的大致范围。
水上搜寻的技术手段比较丰富,可以利用船只、飞机、雷达和卫星等手段进行海、空、天立体化搜寻。一旦找到有价值的线索,将能极大降低第2阶段工作的难度。比如2009年6月1日,法航447航班毫无征兆地消失在大西洋,1周后在海面找到了失事客机的残骸碎片。通过尝试了不同的海流模拟方法,经过不懈的水下艰苦搜索过程后,终于在坠机事件发生3年后找到了飞机残骸和黑匣子,成功揭示了客机失事的原因。
如果通过第1阶段的水上搜寻工作能成功找到漂浮碎片,即可推断划定水下搜索范围,迅速转入第2阶段工作。然而第1阶段的工作并不一定总能得偿所愿,比如2014年3月8日,马航MH370航班失联以来,一直未能成功找到残骸的碎片。这种情况将给第2阶段的水下搜索工作带来巨大的挑战。在茫茫大海之下,海底地形和海流条件非常复杂,海面气候条件也是变幻莫测,在数千米的大海深处寻找残骸的难度可想而知。第2阶段的工作主要为以下几个流程。
1)编制海图。由于人类目前对于深海水域的认知程度普遍不高,因此深海探测工作的第一步即是获取目标海域的海底地形数据[4],编制详细的海图。需要用到的测量设备包括深水多波束和单波束设备等。这一过程的进度取决于第1阶段划定范围的大小,可能持续数月或更长的时间。
2)测量海流。深海处的水流情况复杂,可能将残骸物带离事发地点,也会给深海拖曳设备和遥控潜航器(ROV)等作业带来影响。因此在获取海底地形数据后,还需获取深海处的水流情况。需要用到的测量设备是多普勒声学流速剖面仪[5],可以结合编制海图的工作同步开展。
3)深海探测。以现有的技术水平,无法在海面直接探测到数千米海底的小目标。但可以利用多种深海探测设备深入海底附近(距离海底50~100 m)进行近距离的大范围探测。需要用到的测量设备包括深海拖曳平台和自主式无人潜航器(AUV)[6](可集成侧扫声呐[7]、浅地层剖面仪、多波束、磁力仪[8]等),还有对探测设备进行水下定位的基线系统[9]。为了完成这些深海探测设备的收放工作,还需配置必要的操控支撑系统,包括A型架、绞车和吊机等。
4)可视确认。声学探测设备为找到目标提供了有利线索,但毕竟不如光学设备直观。因此,在发现疑似水下目标后一般最终都采用光学可视设备予以确认。需要用到AUV或ROV搭载光学摄像系统抵近观测。
1.2 深海探测设备的配备
综上分析,为了完成深海探测任务,在船上需要固定搭载以下设备:
1)A型架;
2)牵引绞车;
3)深水多波束和单波束探测设备;
4)声学多普勒流速剖面仪(ADCP);
5)超短基线。
深海拖曳平台或AUV,ROV等,可根据任务需要临时搭载。
2 深海探测设备的适装性分析
以某大型巡航救助船为例,根据本船的实际情况,提出不同的加装深海探测设备型式并进行对比分析。
2.1 加装船艉A型架和牵引绞车
A型架和牵引绞车用来收放深海拖曳设备,一般布置在露天甲板尾部区域。大型巡航救助船主甲板尾部平坦,有开阔的作业甲板平台,可以布置A型架和牵引绞车(图1)。
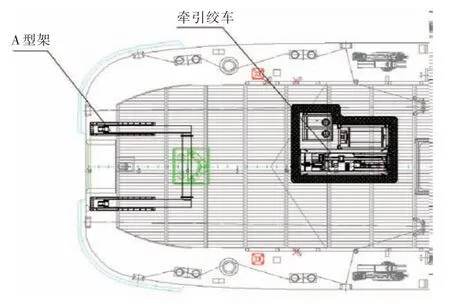
图1 A型架和牵引绞车布置图Fig.1 Arrangement of A-frame and traction winch
加装的难点在于此平台也是拖带作业平台,安装A型架和牵引绞车会影响拖带作业的功能。由此提出以下2种解决方案。
1)A型架固定,牵引绞车模块化。
若牵引绞车固定安装,将导致拖缆无法从拖缆机直接引至尾滚筒位置(图2),且牵引绞车占据了甲板面的作业位置,影响溢油回收和人命救助功能。因此牵引绞车应采取模块化安装方式。若尾部A型架固定安装,其优势是可以保证一次施工到位,确保尾部深海拖曳等设备的安全工作。但对拖带功能也有影响,需要对船舶功能进行重新定位,取消拖带能力。
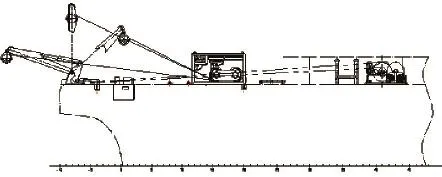
图2 A型架和牵引绞车对拖带功能的影响Fig.2 Effect of A-frame and traction winch on towing function
2)A型架和牵引绞车均模块化。
若想保留一定的拖带功能,尾部A型架和牵引绞车都必须采取模块式安装。为此,需要为A型架和牵引绞车设计便于临时安装的基座,设备与基座结构采用螺栓连接方式。
但A型架模块式安装少有先例,存在一定的技术风险,且在实际使用过程中并不方便,只能执行单一任务。因为一旦模块安装在船上,拖带功能还是无法实现。若要拆除模块必须回到码头进行施工,而无法在航行状态自行拆除。这种状态难以应对海上突发事件瞬息万变的情况。
结合本船的实际情况,船东希望尽可能保留本船的拖带功能。因此建议选择方案2,即A型架和牵引绞车均采用模块式安装,但在执行任务前应留有足够的模块安装时间,在安装时还需特别注意安全问题。
2.2 操控设备集中控制位置
为了便于尾部作业时对A型架、通用绞车等的集中控制和操作,建议设置1处集中控制站。对控制站的基本要求是,必须具备良好的观察视野,即尽可能看到作业甲板上的设备工作情况。集中控制位置可设置为控制室或露天控制站。
2.2.1 集中控制室
如果能设置独立的集中控制室是最有利于设备操作的。但因为本船是在现有船的基础上改装,不便增加新的房间,只能从现有的房间重新分配。从总布置来看,主甲板的房间基本都在A架和绞车前方,不具备良好的观察视线。直升机甲板的房间内更加无法看到作业区。只有起居甲板1尾部的塔台和航空储藏室具备良好视线的条件。但他们距离操作区较远,且塔台是直升机指挥的专用场所,不宜作为支撑设备控制室。航空储藏室内部甲板局部突起,影响设备布置和人员操作。
2.2.2 露天集中控制站
在合适的露天部位设置集中控制站也可以达到目的。比较理想的位置有2个:一是布置在直升机甲板尾部,可俯瞰整个作业区域。但直升机甲板作业时不允许甲板有突起物,这要求控制台也能够采用模块式安装或临时放倒;另一个较理想的位置是在主甲板尾部舷侧,也可看到整个作业区域(图3)。此处控制台建议采用模块式安装,甲板面仅留基座。
综上所述,推荐采用设置露天集中部位,布置在主甲板尾部舷侧的位置。

图3 集中控制部位布置图Fig.3 Arrangement of centralized control panel
2.3 加装多波束、单波束设备及ADCP
探测设备(如深水多波束、多频深水单波束和ADCP)的换能器可以集中布置,但声学探测设备易受到外界因素的影响,其中来自船体的干扰因素包括噪声和气泡。噪声源来自船上的机械(主机、辅机等)和螺旋桨,因此换能器必须尽量避开这些噪声源,布置在船舯前1/3处是合理的[10]。
气泡主要由海面运动产生的碎浪引起,存在于海水近表面处的气泡,在海况特别恶劣的情况下会扩散到海面以下5~10 m处。这些气泡分布广泛、数量众多,会吸收、反射甚至阻隔声波的传播,如果大量气泡流向换能器底部,将导致换能器无法正常工作。船舶在航行时船艏的气泡会随着边界层流向船艉,当船底两侧斜向抬升角较大(方形系数小,线型偏瘦)时,气泡可以顺利流向舷侧,不会影响到换能器的工作。但如果船底非常平缓(方形系数大,线型丰满)时,气泡可能沿船底向艉部流动,经过换能器底部时则会影响换能器的正常工作[11]。
综上分析,声学换能器布置在平流层区域较为理想。结合本船的实际情况,确定最佳布置如图4所示。
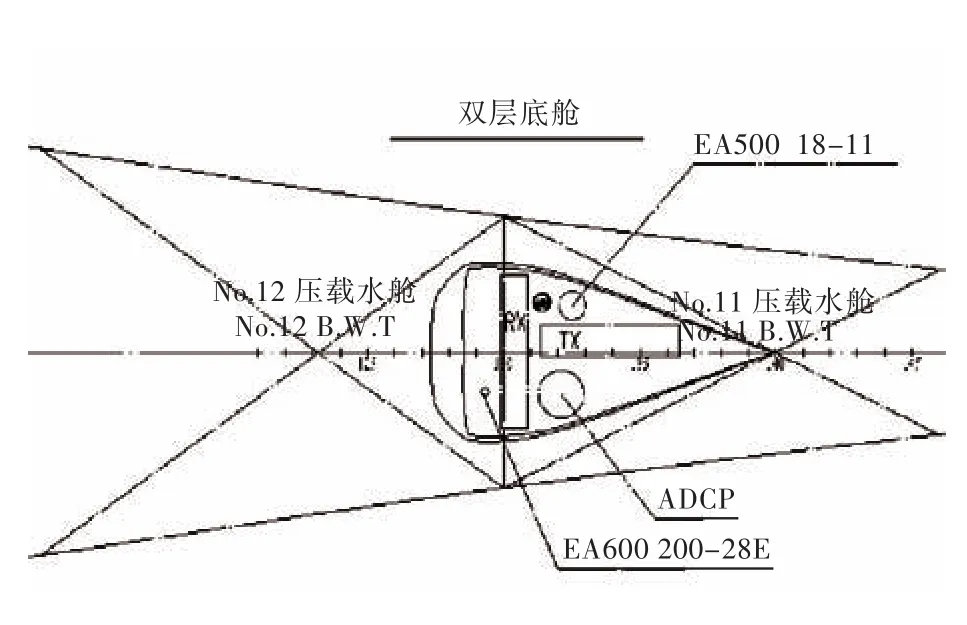
图4 声学换能器布置图Fig.4 Arrangement of acoustic transducers
声学换能器的安装方式有以下3种。
1)嵌入式。深水多波束、多频深水单波束探测设备和ADCP等换能器均采用嵌入式安装方式。此种安装方式的优点是附体阻力增加较少,对航速影响可忽略。缺点是船体表面的气泡容易随水流移动到换能器下方,从而影响多波束探测设备的成像质量。从船型特点来看,该船的艏部线型偏瘦,有利于气泡的扩散。但是偏瘦的线型难以实现嵌入式安装,另外此处布置有2个压载水舱,采用嵌入式必然对舱内的涂层伤害较大,因此嵌入式的安装方式不适合本船。
2)吊装式(GONDOLA)。吊装式安装方式需将换能器布置在船体下方约1 m处,隐藏在T字型或梯形导流罩内,导流罩通过流线型的支架支撑。这种安装方式的优点是换能器距离船体较远,可以避免船体表面的气泡随水流移动到换能器下方,使多波束探测设备获得更高的成像质量。缺点是附体阻力会大幅增加(可达裸船体阻力的20%以上),支架刚度不足时可能产生局部振动影响设备的正常工作。此外,突出的附体更容易导致搁浅触底、挂渔网电缆以及船舶进坞等困难。
3)导流罩式。其中换能器位置紧贴在船体下方,为其设计的导流罩突出船体约为600 mm。这种安装方式的优点是换能器距离船体有一定距离,船体表面产生的气泡不易随水流移动到换能器下方,多波束探测设备的成像质量也较高。缺点是会产生一定的附体阻力(可达裸船体阻力的10%~15%)。对船体艏部的流场进行CFD数值分析发现,球鼻艏和艏侧推部位产生的气泡,在换能器处的影响范围可控制在船底下方500 mm内,不会对探测设备的效能产生较大影响(图5)。

图5 艏部流场CFD数值分析Fig.5 CFD numerical analysis of fore flow field
由于本船不适合采用嵌入式的安装方式,吊装式和导流罩式可作为备选方案。吊装式工程代价较大,且对航速影响更大,从经济性考虑不如导流罩式。综合利弊推荐导流罩安装方式是经济可行的。
2.4 加装超短基线系统
超短基线系统采用换能器自动收放装置进行收放。为了安装这一收放系统,需要在合适位置设置1个声呐井。收放系统的高度约6 m,因此,声呐井需要上下贯穿船底板、内底和平台甲板。
超短基线井布置在146~148号肋位右舷。安装井需要占据应急消防泵舱和电气备件库部分空间。超短基线井的布置图如图6所示。
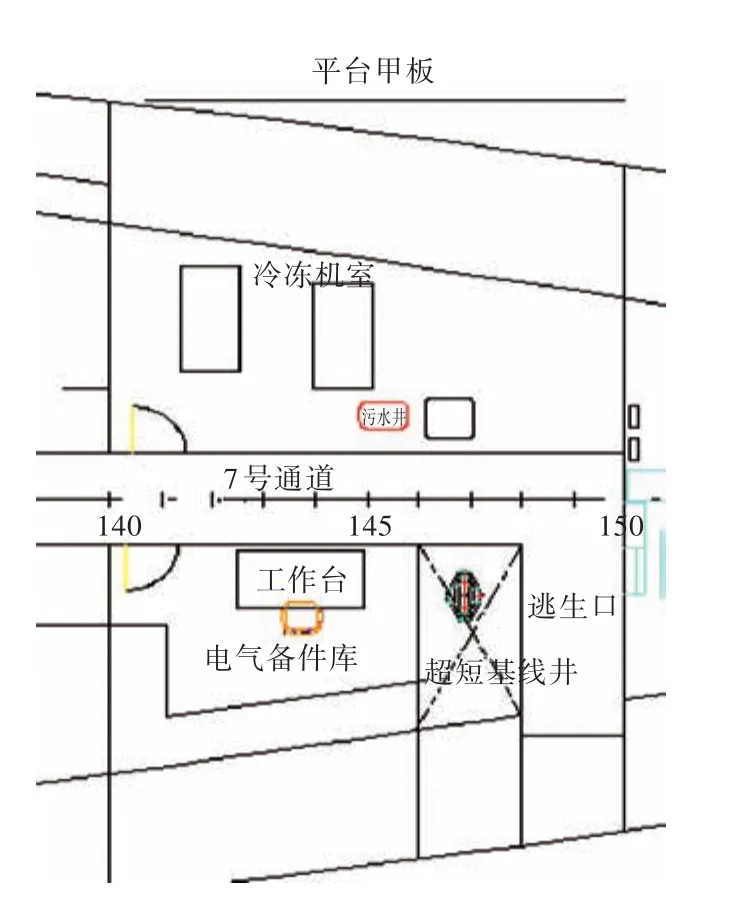
图6 超短基线井布置图Fig.6 Arrangement of Ultra Short Baseline(USBL)
3 对总体性能的影响
3.1 对重量重心的影响
增加重量包括20 t的A型架、15 t牵引绞车、多波束设备、超短基线设备、ADCP设备、深水单波束设备、导流罩结构、设备加强结构等。共计增加重量约80 t,同时重心高度将会略有增加。
3.2 对航速的影响
增加导流罩的突出船体将增加较大阻力,超短基线的船体开口和排水量也会增加阻力。通过CFD数值分析表明,将导致所需有效马力增加约15%,设计航速因此降低约1 kn(图7)。

图7 加装设备对有效马力的影响Fig.7 Effect of added equipment onEHP
3.3 对稳性的影响
大型巡航救助船采用概率破舱计算破损稳性,完工状态时计算值已接近规范允许的临界值(规范要求分舱指数0.541 15,计算值0.543 05)。在重量和重心高度增加的情况下,稳性计算很可能难以满足规范的要求。由此,可能需要采取增加压载以降低重心高度,或增加水密门等措施满足破损稳性的要求。如果使用固定压载,需要50 t。
3.4 对浮态的影响
新增的探测设备增加后,主要安装在船的中、后部,各装载状态艉倾角度增加。改善措施是在满足破舱稳性的前提下,使用固定压载改善艉倾。设备增加、固定压载增加,本船需要重新堪划载重线。
3.5 对人员居住的影响
为了布置多波束机柜等设备,将主甲板右舷131~137号肋位水手室改为声学设备舱(图8)。

图8 主甲板增加声学设备舱Fig.8 Added acoustic equipment room on main deck
3.6 对满足PSPC的影响
导流罩需要在船底施焊安装,但此处底部布置有压载水舱。施焊后将破坏压载水舱内的部分涂装,无法满足IMO关于《船舶专用海水压载舱和散货船双舷侧处所保护涂层性能标准(PSPC)》的要求。
3.7 对舷墙的影响
船艉布置A型架的高度约8 m,为保证起降安全,建议A型架向后最大翻转角设计为75°,在直升机起降时将A型架向后翻转至最大角度。这需要将船艉舷墙进行适应性改造。
4 结 语
本文以某大型巡航救助船为例,在对深海探测任务需求分析的基础上,提出了探测设备配备方案。并结合船型特点,对不同加装方案的适装性进行了对比分析,给出了推荐的安装方式。
研究表明,为了尽快获得深海探测能力,在已有的大型公务船加装深海探测设备是合理可行的,本文的探索为加快建设我国深海探测能力提供了新的设计思路。
[1] 李朗,王立松,张志平,等.试论建设我国统一的海上专属经济区执法船队[J].海洋开发与管理,2013,30(8):28-32. LI Lang,WANG Lisong,ZHANG Zhiping,et al.Con⁃struction of uniform exclusive economic zone enforce⁃ment ship[J].Ocean Development and Management,2013,30(8):28-32.
[2] 吴刚,刘巍,曲宁宁.远洋级公务船与调查船的抗风力研究[J].船舶工程,2013,35(1):19-21,25. WU Gang,LIU Wei,QU Ningning.Anti-wind study on ocean public vessel and research vessel[J].Ship Engineering,2013,35(1):19-21,25.
[3] 李颖虹,任小波.深海的呼唤——深海技术发展现状及对策思考[J].中国科学院院刊,2011,26(5):561-569. LI Yinghong,REN Xiaobo.Call from deep sea-reflec⁃tion on development status and countermeasures of deep sea technology[J].Bulletin of the Chinese Acade⁃my of Sciences,2011,26(5):561-569.
[4] 董庆亮,欧阳永忠,陈岳英,等.侧扫声纳和多波束测深系统组合探测海底目标[J].海洋测绘,2009,29(5):51-53. DONG Qingliang, OUYANG Yongzhong, CHEN Yueying,et al.Measuring bottom of sea target with side scan sonar and multibeam sounding system[J]. Hydrographic Surveying and Charting,2009,29(5):51-53.
[5] 蓝标,曲娟.声学多普勒流速剖面仪ADCP及其在水文测流中的应用[J].气象水文海洋仪器,2011,28(4):65-68,73. LAN Biao,QU Juan.Application of acoustic Doppler current profiler ADCP in hydrologic survey[J].Meteo⁃rological, Hydrological and Marine Instruments,2011,28(4):65-68,73.
[6] 牟健,姜峰,赖新云.深海多波束系统、深拖系统及合成孔径声呐系统的技术性能对比[J].武汉理工大学学报(交通科学与工程版),2012,36(1):82-86. MU Jian,JIANG Feng,LAI Xinyun.Technical com⁃parison between multi-beam sounding system,deep-tow system and synthetic aperture sonar system[J].JournalofWuhan UniversityofTechnology(Transportation Science and Engineering),2012,36(1):82-86.
[7] 张济博,潘国富,丁维凤,等.相干声纳及其与传统侧扫声纳的比较[J].海洋技术,2013,32(2):86-89,93. ZHANG Jibo,PAN Guofu,DING Weifeng,et al. Comparison between interferometric sonar and tradi⁃tional side scan sonar[J].Ocean Technology,2013,32(2):86-89,93.
[8] 于振涛,吕俊伟,张本涛.基于海底磁力仪阵列的磁性目标定位方法[J].武汉理工大学学报,2012,34(6):131-135. YU Zhentao,LV Junwei,ZHANG Bentao.A method to localize magnetic target based on a seabed array of magnetometers[J].Journal of Wuhan University of Technology,2012,34(6):131-135.
[9] 勇俊,李昭,郑翠娥,等.超短基线纯方位定位的目标搜索航迹规划[J].哈尔滨工程大学学报,2012,33(4):438-444. YONG Jun,LI Zhao,ZHENG Cuie,et al.The target searching track design of USBL bearing-only position⁃ing[J].Journal of Harbin Engineering University,2012,33(4):438-444.
[10] 孟繁涛,唐丰.多波束测深系统在科考船上的布置研究[J].船舶与海洋工程,2013(1):24-28. MENG Fantao,TANG Feng.Arrangement of multi⁃beam sounding system on research ship[J].Naval Ar⁃chitecture and Ocean Engineering,2013(1):24-28.
[11] SIMRAD K.EM302 installation manual[M].Nor⁃way:Norway Kongsberg Simrad,2009.
[责任编辑:胡文莉]
Analysis of the feasibility of installing deep-sea detectors in large public vessels
CHEN Rui,HUANG Wugang
China Ship Development and Design Center,Wuhan 430064,China
To incorporate the deep-sea detecting capability into large public vessels,this paper presents a notion to install deep-sea detectors in large public vessels.Four processes are introduced by analyzing the trait of deep sea exploring assignment,which are chart compilation,current survey,deep sea exploration, and video affirmance,respectively,and it is suggested that the A-frame,towing winch,and multiform acoustic detectors should be equipped.An example of a big cruising and salvaging ship is next given,and by combining the characteristic and arrangement of the ship,the paper puts forward an approach to install the modular A-frame and towing winch,the outdoor centralized console,and the main acoustic detectors in a blister but Ultra Short Baseline(USBL).Finally,the corresponding effects on the center of gravity,speed, stability,accommodation,Performance Standard for Protective Coatings(PSPC)and bulwark are analyzed. It is concluded that installing deep-sea detectors in large public vessels is reasonable and feasible,which offers a logic notion to obtain deep-sea detecting capability efficiently.
deep-seadetect;scientificresearch;largepublicvessels;fairing;multibeam soundingsystem
U662.3
A
10.3969/j.issn.1673-3185.2015.06.004
http://www.cnki.net/kcms/detail/42.1755.TJ.20151110.1025.008.html期刊网址:www.ship-research.com
陈锐,黄武刚.大型公务船加装深海探测设备的可行性分析[J].中国舰船研究,2015,10(6):21-26. CHEN Rui,HUANG Wugang.Analysis of the feasibility of installing deep-sea detectors in large public vessels[J]. Chinese Journal of Ship Research,2015,10(6):21-26.
2015-03-03 < class="emphasis_bold"> 网络出版时间:
时间:2015-11-10 10:25
陈锐(通信作者),男,1979年生,硕士,工程师。研究方向:船舶总体研究与设计。E-mail:happyrichard@163.com黄武刚,男,1985年生,硕士,工程师。研究方向:船舶总体研究与设计
