模糊图像迭代盲反卷积复原
2015-02-20刘小芳秦丽娟
刘小芳,秦丽娟,李 莹
(沈阳理工大学 信息科学与工程学院,辽宁 沈阳 110159)
模糊图像迭代盲反卷积复原
刘小芳,秦丽娟,李 莹
(沈阳理工大学 信息科学与工程学院,辽宁 沈阳 110159)
针对超速或换道车辆容易出现的图像模糊问题,提出了基于盲反卷积的去模糊方法。传统的去模糊方法是假定已知模糊参数,而实际的目标图像模糊参数是未知的。所以采用一种盲复原方法,首先估计出模糊点扩散函数PSF,然后进行模糊处理。根据实际采集的图像含有高斯噪声的特点,将常用零均值高斯白噪声作为其噪声模型,根据噪声均值与方差的最小二乘估计改进盲反卷积模型,得出新的恢复模型,进而恢复含噪声的模糊图像。结果表明,该算法较传统算法恢复效果得到明显改善。
模糊;盲反卷积;PSF;车辆
摄像头与运动物体间的相对运动会产生模糊[1]。图像复原的过程是对退化图像进行去模糊处理的过程。1967年Helstrom[2]将维纳滤波器用于图像复原,该算法大大简化了传统算法。1973年Hunt B.R.[3]提出了约束最小二乘算法,与维纳滤波算法一样也是频域反卷积算法,缺点是恢复图像的边缘和细节会出现振铃效应。1988年Lagendijk R.L.等[4]提出受限自适应复原算法,该算法能有效改善振铃效应。1972年Frieden B.R.[5]提出了最大熵算法,该算法同样能较好地处理噪声污染,但问题是计算量较大。以上算法都需要对模糊参数具有先验知识,而往往图像的模糊点扩散函数是未知的。所以需要采用盲复原的恢复方法。
1 算法描述
本文的研究对象是相对于摄像机沿任意方向进行匀速直线运动的车牌图像。模糊图像可以表示为模糊图像的点扩散函数与原图像卷积而成,如公式(1)所示。所以去模糊过程即解卷积过程。该算法结合动量矩和平均值算法估计出一个阈值,对图像进行二值化划分,得到有限支持域。利用已知的图像信息结合约束条件同时恢复原图像和图像的PSF。其中约束条件包括能量不变性和频域限制条件,恢复图像的清晰度由初始值和约束条件限制。恢复过程为在空间域和频域进行交替变换,并且在迭代过程中结合约束条件和有限支持域的限制。根据有限支持域上的观测图像f(x,y) 和点扩散h(x,y),求得到目标函数min dist(g,f*h)。传统盲反卷积算法不含噪声,而实际噪声不可能为零,因此会使复原解偏离真实解,所以需要结合噪声方差和噪声均值进行最小二乘估计,得到新的最小化函数[6]。通过在迭代过程中不断求解最小化函数,得到函数f(x,y)和h(x,y),从而得到恢复图像。
g(x,y)=f(x,y)*h(x,y)+n(x,y)
(1)
1.1 退化模型建立
实际图像并不是零噪声的,会有多种噪声:一方面是记录在感光片上的图像会受到感光颗粒噪声的影响;其次,图像从光学到电子形式的转换是一个统计过程(因为每个图像元素接收到的光子数目是有限的);最后是图像处理器件引入的热噪声[7]。上述噪声可以用零均值高斯白噪声作为模型。不含噪声车牌图像如图1所示。本文加入均值为0,方差为0.01的高斯噪声,如图2所示。

图1 模糊图像

图2 加入高斯噪声后图像
1.2 点扩散函数估计
本文采用模糊长度为7,模糊角度为20的点扩散函数产生模糊图像。首先对模糊图像进行预处理。然后创建原始PSF函数(模糊图像点扩散函数)即与原始图像同样大小的PSF掩膜。
通过对超速车辆的模糊图像点扩散函数进行统计,设定模糊图像PSF半径为15,即15×15大小的矩阵,矩阵像素值为全1。设目标图像大小为size_f。设定size_f大小的全0矩阵,其中坐标(0,0)至(15,15)的正方形区域内像素为全1,作为PSF掩膜h_z。
1.3 支持域
1.3.1 定义
支持域就是包括原始图像的非零像素值最小的矩形区域,在支持域内进行迭代恢复,能大大提高算法运行效率。位移模糊会影响迭代反卷积算法的收敛,因为解可能收敛到位移相叠加的图像上,或处于若干相叠加的图之间,使结果无法收敛[8]。所以必须限制解的支持域,将上文求解的支持域作为限制嵌入到迭代反卷积算法中,可以消除解不收敛问题。本文利用动量矩和平均值算法计算图像支持域。
1.3.2 图像动量矩
首先计算出图像大小及size_f值,分别统计图像最小的以及最大的像素值m1、m2,并且统计各像素值大小的像素点数。设S为像素点数矩阵(对应各像素的点数),M为像素矩阵与像素点数矩阵的点乘。一阶动量矩A大小为像素点数和即A=sum(S),二阶动量矩B大小为所有像素值与相应点数的乘积的B=sum(M)。
1.3.3 平均值算法

(2)

1.4 约束条件
1.4.1 能量约束
能量不变性条件主要是图像中的像素值不可以为负值以及点扩展函数具有恒定不变的能量。能量约束用于加快算法收敛。
非负的约束条件为
(3)
(4)
(5)
上式中的E为图像中所有像素点负值的和,恢复时将进行能量的重新组合,n是原始图像中像素点的总数。在迭代过程中只要仍然包含负值迭代就会不断地反复进行,直到迭代终止或者没有负值则迭代停止[10]。
1.4.2 频域限制
(6)
式中β为频域限制参数,算法的收敛速度受参数β影响。
(7)
(8)
1.4.3 最小二乘估计
由于图像含有噪声,所以需要对最小化函数结合噪声均值和方差进行最小二乘化估计。
原盲反卷积的最小化模型为
(9)
退化图像存在污染时:n(x,y)=g(x,y)-f(x,y)*h(x,y)
(10)
(11)
(12)
分别对噪声方差和噪声均值做最小二乘估计,可得如下表达式:

(13)

{[g(x,y)-f(x,y)*h(x,y)]-0}2
(14)
综上,新的盲反卷积复原最小化模型为

(15)
式中α为权重系数。
1.4.4 迭代恢复过程
(1) 求解图像支持域k,通过计算得
A=54984,B=4228887,A1=50507,B1=3588363,t=127,k为值小于t的所有像素。
(2) 创建与图像f大小相同的全1的矩阵H,其中size_f=(232,237)。利用H=C./F。式中C=fft2(f)(f是图像像素矩阵首先进行灰度化以及双精度化变换后的值),C的值为f的傅里叶变换值,F=C。
(3)H进行傅里叶反变换得到h_es,并且令h_es值等于其实部值。
(4)根据能量约束原理将h_es小于0的部分置为0。
(5) h_es与点扩散函数掩膜进行点乘,得到新的点扩散函数估计值h_es。
(6) 令h_es = h_es/sum(h_es(:)),并且进行傅里叶变换得到H=fft(he_s)。
在以上研究基础上,本文提出了一种基于二次速度估计的高分辨距离像补偿算法。首先,利用互相关FFT法对目标参数进行粗估计,并结合速度和距离的先验知识设置合理的搜索区间。然后基于最小波形熵准则,采用MDCFT进行精确估计,实现距离像的运动补偿。
(8) 图像频域值F进行傅里叶反变换f_es=ifft2(F),f_es结合均值为0,方差为0.01的高斯噪声进行最小二乘估计,得到新的f_es。
(9) 取f_es实部值,以及根据能量约束,将小于0部分赋值为0。
(10) 用支持域内的像素值代替原值,f_es(k)=f(k)。
(11) 根据式(3)、(4)、(5)求能量E,令f_es=f_es +E/n,其中n为迭代次数。
(12) 恢复值进行傅里叶变换F=fft2(f_es)。
2 实验结果及分析
经过上述迭代过程,得到图像矩阵恢复值f_es,以及点扩散函数恢复值h_es。不同迭代次数效果图(假设迭代次数为n):图1至图6分别为PSF傅里叶变换值H、进行条件约束后的图像、支持域内图像频域值、支持域内恢复图像、PSF估计值、PSF频谱。
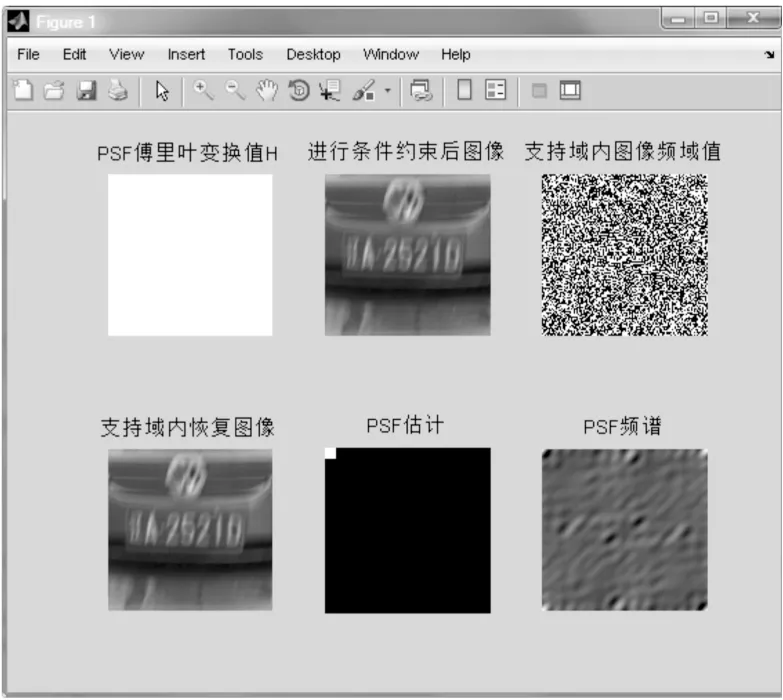
图3 迭代次数n=10时

图4 迭代次数n=20时

图5 迭代次数n=30时
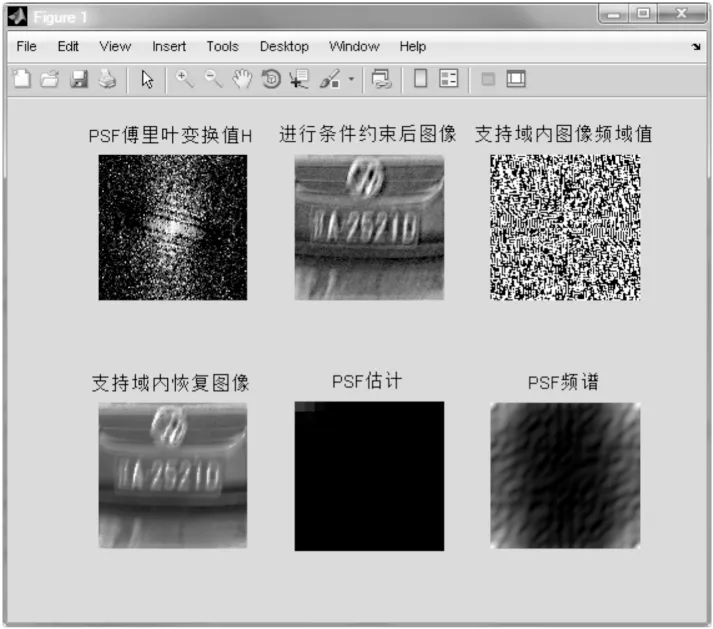
图6 迭代次数n=40时
峰值信噪比公式如下所示。
(16)
最小均方误差公式如下所示。
(17)


图7 峰值信噪比及均方误差曲线图
由迭代效果图以及误差曲线图可知,迭代次数为30次时图像的恢复效果最好。所以选取n=30。
由结果所示,相较于传统盲反卷积算法加入噪声估计后的图像具有较好的恢复效果。可见,盲反卷积算法对于那些先验知识无法获取的模糊图像仍可取得良好的效果。迭代操作反应了盲反卷积算法的精度,随着循环迭代次数增加的,精度也不断提高,但超过最佳恢复效果时,图像会出现失真情况。所以,选择最佳迭代次数时的恢复图像作为最终图像。
3 结束语
提出了一种利用改进的盲反卷积算法求解支持域的图像盲恢复方法,针对实际图像含有高斯噪声的问题,结合噪声均值与方差的最小二乘估计创建恢复模型。该算法根据动量矩原理和平均值算法获得图像的有限支持域。并且结合初始条件和能量不变性及频域约束条件进行限制。将图像看做二维矩阵,将构建的基于有限支持域的约束函数嵌入到传统盲反卷积算法算法中进行迭代求解,结果表明比未加入噪声估计的算法图像恢复效果更好。
[1]郭永彩,丁小平,高潮.基于差分自相关的运动模糊图像尺度参数识别[J].光电工程,2011,38(6):134-140.
[2]Helstrom C W.Detection theory and quantum mechanics[J].Information and control,1967,10(1):254-291.
[3]Hunt B R.The application of constrained least estimation to image restoration by digital computer[J].IEEE transactions on computers,1973,C-22(9):805-812.
[4]Lagendijk R L,Biemond J,Boekee D E.Regularized iterative image restoration with ringing reduction[J].IEEE Transaction on acoust.speech signal processing,1988,(36):1874-1888.
[5]Frieden B R.Restoring with maximum likely good and maximum entroy[J].OptSoc.Am,1972,(62):511-518.
[6]邹文洁.一种新的基于倒谱法和Richardson-Lucy算法的运动图像盲复原方法[J].南华大学学报(自然科学版),2010,24(2):61-67.
[7]郭红伟.基于频谱边缘检测的运动模糊方向精确估计[J].计算机应用,2012,32(3):770-772.
[8]Yan L X,Fang H Z,Zhong S.Blind image deconvolution with spatially adaptive total variation regularization[J].OPtics letters,2012,37(14):2778-2780.
[9]李艳琴,张立毅,孙云山,等.一种改进的图像迭代盲反卷积算法[J].计算机工程,2012,38(8):300-302.
[10]Babacan S D,Molina R,Do M N,et al.Bayesian blind deconvolution with general sparse image priors[C].European conference on computer vision,Florence,Italy,EC-CV,2012:341-355.
[11]黄建明,沈忙作.基于噪声特性的大气湍流退化图像多帧盲反卷积复原[J].光学学报,2009,24(3):50-52.
[12]Li Minjun,Yang Bo,Hu Jing.Stellar refraction the NAVSTAR improve triangle identification capture[J].Aerospace Control,2012,30(1):33-39.
(责任编辑:马金发)
Blurred Image Restored by Iterative Blind Deconvolution
LIU Xiaofang,QIN Lijuan,LI Ying
(Shenyang Ligong University,Shenyang 110159,China)
To deal with the problems caused by the speeding or changing track of the vehicle image fuzzy,a fuzzy method based on blind deconvolution is proposed.Traditional fuzzy method is assumed to known fuzzy parameters,and actual target image fuzzy parameter is unknown.So a method of blind restoration is adopted firstly to estimate the point spread function (PSF) fuzzy PSF,then it is blurred.Simulation results show that recovery effect of the algorithm is superior to traditional methods in comparison with different methods by experiment.Also,according to the characteristics of actual collection of image with gaussian noise,the common zero mean gaussian white noise is thought as a noise model;according to the noise mean and variance of the least squares estimate improved blind deconvolution model,which concluds that new recovery model is developed and restores the blurred image containing noise well.
: fuzzy;blind deconvolution;PSF;vehicle;
2014-06-26
国家自然科学基金资助项目(61203163);国家重点实验室基金资助项目(2013-006);辽宁社科规划基金项目(L13BJY023)
刘小芳(1988—),女,硕士研究生;通讯作者:秦丽娟(1978—),女,副教授,博士,研究方向:图像识别与机器视觉.
1003-1251(2015)05-0028-05
TP391
A
