天宝UX5无人机航测系统在公路勘察设计中的应用
2015-02-19魏方震,武少丰,吉世鹏等
天宝UX5无人机航测系统在公路勘察设计中的应用
魏方震,武少丰,吉世鹏,杜洪涛
(河南中原公路勘察设计有限公司,河南 濮阳 457000)
一、引言
目前,公路带状地形图的勘察测量主要采用全站仪、GPS RTK测量,以及传统的航空摄影测量法。全站仪测量及GPS RTK测量需要投入大量人力、物力,在地形复杂、破碎、建筑密集地区测量难度大且勘测周期长,进而导致工程效率低、成本高。传统航空测量虽然技术成熟、应用广泛,但对天气和机场条件的依赖性大、成本较高、摄影周期较长。无人机系统航测可以在最低云下飞行,而且不受机场条件的限制,可以有效弥补大飞机航测的不足。
天宝UX5无人机航测系统包含外业无人机和内业数据后处理软件。外业飞行主要由无人机系统、飞行控制系统、地面控制系统等组成,最高飞行高度为750 m,最低飞行高度为75 m;内业数据处理由TBC PM版数据处理软件系统完成。
二、项目应用分析
1. 测区概况
测区位于中纬度地带,常年受东南季风环流的控制和影响,气候温和,四季分明,年平均日照时数为2 454.5 h;测区内以平原为主,最高海拔58 m,最低海拔44 m,整个地势由西南向东北略有倾斜。测区内交通便利, 该公路申报等级为二级公路,设计速度80 km/h,路基宽度18 m,路线全长46.34 km,改线路11.7 km,利用老路加宽34.64 km,改线路占地374 667 m2,利用老路加宽占地762 000 m2,合计占地1 136 667 m2。
2. 无人机航空摄影
本测区选用天宝UX5无人机航测系统,系统根据测区精度要求自动规划飞行航线,自主飞行获得测区内1∶2000地形图。测量区域为沿路线中线两侧各1 km宽度,形成带状区域,整个航摄面积为95 km2,路线长度46.34 km,航高设定为300 m,地面分辨率达到9.6 cm,航向重叠度80%,旁向重叠度80%;共分5个飞行任务,24个架次,8417张航片。航线布设如图1所示。
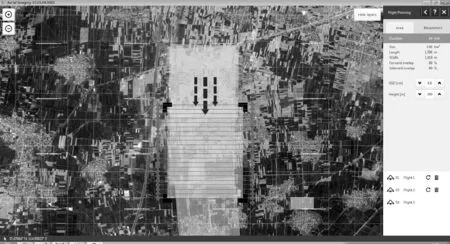
图1 无人机航线布设示意图
3. 像控点布设
外业像控是航测的基础,是内业成图的依据,为保证数据的准确性,在每个架次飞行前须布设像控点。根据UX5航测系统的特点及测区情况,在每个架次的两端各布设一对像控点,中间布设一个像控点。像控点布设如图2所示。

图2 像控点布设示意图
4. 内业数据处理
外业飞行完成后,将无人机采集到的航飞姿态数据及影像数据(照片)导入TBC PM(Trimble Business Center)软件系统进行处理。处理时可以根据计算机配置情况和工程紧迫性,采用单架次处理或多架次合并处理,由于本项目架次较多,故采用多架次合并处理。经测试最多可同时处理3600张航片。将每一个飞行架次的飞行姿态数据导入到TBC软件,可同时导入多个架次,然后合并架次后处理。先进行连接点平差,以修正摄像点相对方位;连接点平差成功后进行像控点刺点,执行控制点平差,确定物理要素的精确测量的坐标位置,用于修正地理参考图像;最后输出正射影像图、数字地形模型及点云数据。以前的TBC 3.1版本只能输出数字表面模型,而TBC 3.4版本可生成数字地形模型,有效剔除了大部分房屋、地表植被等附属物,更大地提高了高程数据适用性,为后期数据处理节省了很大工作量。如图3所示。

图3
5. DOM、DSM、DTM数据后期转换
由于TBC PM软件处理出来的DOM、DEM不是按标准分幅输出的,因此需要对生成的DOM和DEM进行分幅和裁切。数据的后期转换可以采用Global Mapper等软件进行分幅处理,即首先在南方CASS中做好标准分幅图框,然后在Global Mapper中同时打开DOM数据和图框数据,选择图框,输出裁切到选择区域的图元,如图4所示。
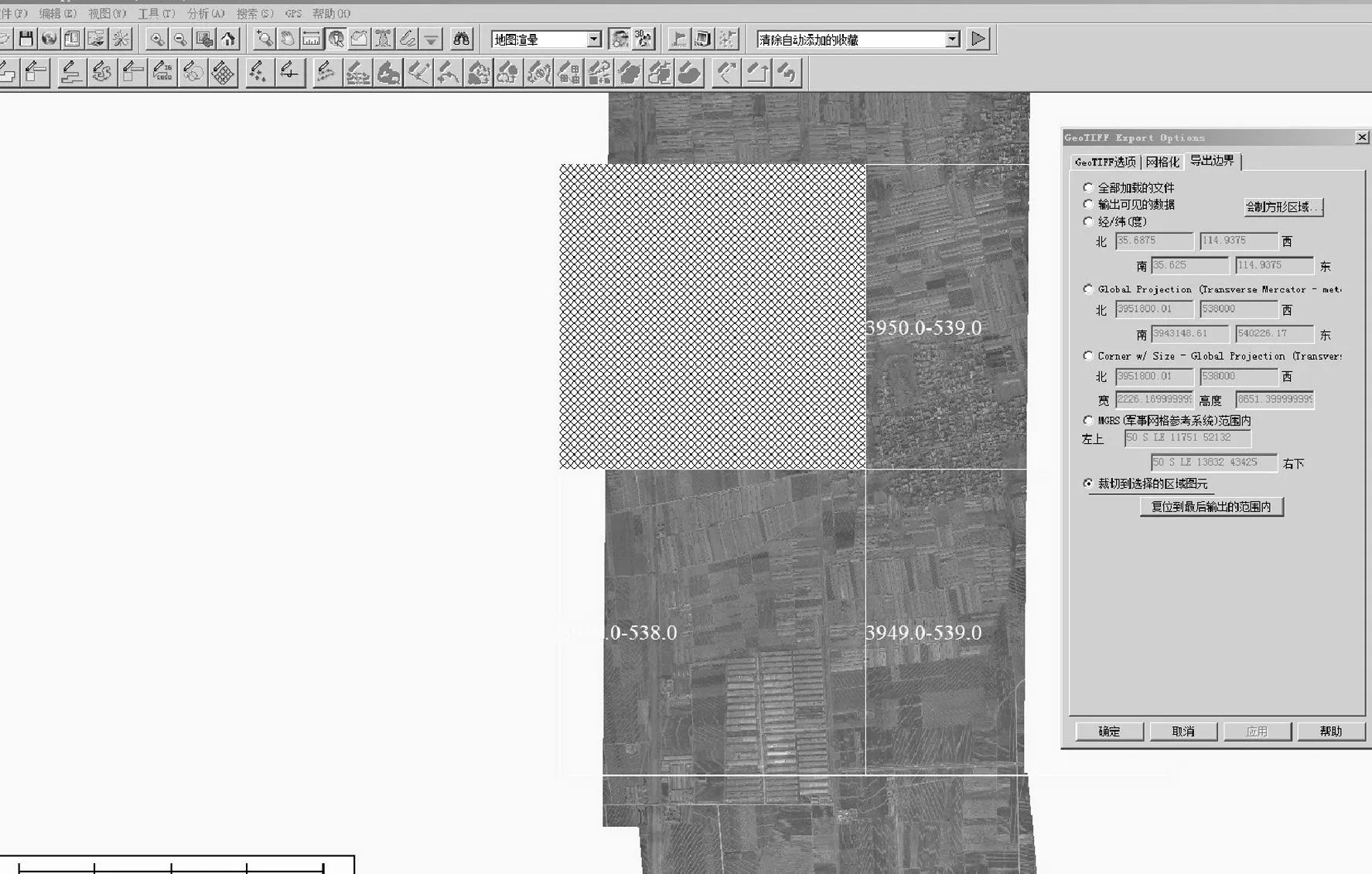
图4
6. 地形图、线画图制作
将分幅好的正射影像图利用小插件ABC_Auto-CAD插入到南方CASS进行扫描矢量化,制作DLG线画图,并利用DEM制作等高线,如图5所示。

图5
三、结束语
天宝UX5无人机航测系统可在最低75 m的高度飞行,地面分辨率最高2.4 cm,处理后生成的正射影像图分辨率达到3 cm,数据精度较高,完全可以满足公路工程选线、初步设计、工程预可行性研究的用途需求,相对于全外业测图和传统航测,大大提高了工作效率,并能获取丰富的图形图像资料。UX5无人机采用的电动方式有效续航时间为50 min,航拍效率有了进一步提高。另外UX5无人机机身采用EPP特殊聚合物材料及碳纤维骨架,具有良好的防冲击性,对于采用俯冲降落腹部着地作业方式的无人机而言,放宽了降落场地的要求。
(本专栏由天宝测量部和本刊编辑部共同主办)
中海达·开启智时代