基于SfM方法的高密度点云数据生成及精度分析
2015-02-18魏占玉ArrowsmithRamon何宏林高伟中国地震局地质研究所活动构造与火山重点实验室北京100029亚利桑那州立大学地球与空间探索学院美国菲尼克斯85287
魏占玉Arrowsmith Ramon何宏林高 伟中国地震局地质研究所,活动构造与火山重点实验室,北京 100029亚利桑那州立大学,地球与空间探索学院,美国,菲尼克斯85287
基于SfM方法的高密度点云数据生成及精度分析
魏占玉1)Arrowsmith Ramon2)何宏林1)高伟1)
1)中国地震局地质研究所,活动构造与火山重点实验室,北京100029
2)亚利桑那州立大学,地球与空间探索学院,美国,菲尼克斯85287
摘要地形数据的质量(精度和分辨率)影响着地球科学的研究水平。LiDAR测量是目前获取高分辨率地形数据的有效技术方法之一,但是其高昂的测量成本和相对复杂的后期数据处理限制了LiDAR技术的大众化应用。近年来,一种被称为SfM(Structure from Motion)的适合大众化使用的新的高精度3维地形数据获取技术开始引起人们的注意。这种新型数字摄影测量技术可以利用高效的图像特征匹配算法从多视角照片中提取重叠区域的3维地形数据。由于SfM技术仅需要目标物体的照片,而且对相机拍摄位置、图像尺度及拍摄焦距没有要求,因此利用简单测量平台采集地面照片就可以获取高质量的3维地形数据。与LiDAR技术相比,大大降低了获取高精度数据的成本,使得高精度3维地形数据的使用大众化。文中介绍了SfM技术的基本原理和流程,展示了SfM技术获取高精度3维地形数据的简单而有效的特性,特别适合于植被稀少的区域。文中利用近千米高空拍摄的、具有约70%重叠度的一套随LiDAR飞行采集的数字航空照片生成具有真彩色的高密度SfM点云数据,点密度高达25.5个/m2,可生成分辨率0.2m的DEM(数字高程模型)。对比相同区域的Li-DAR点云数据,统计分析表明58.3%的LiDAR数据与SfM数据的垂直偏差<0.1m,88.3%的LiDAR数据的垂直偏差<0.2m;而且发现不同地貌的SfM数据精度存在差异,平缓地形的SfM数据精度高于陡峭地形的SfM数据精度。文中还介绍了以氦气球作为拍摄平台的SfM测量系统,可以快捷地获取高精度的3D地形数据和正射影像,比目前常用的差分GPS测量具有更高的效率和数据精度。
关键词Structure from Motion(SfM) LiDAR DEM
〔基金项目〕中国地震重点监视防御区活动断层地震危险性评价项目(201308001)资助。
0 引言
地形数据的质量(精度和分辨率)影响着地球科学的研究水平(Meigs,2013)。在不同时期,一系列测量技术被应用到地貌地形测量中,如早期的全站仪、差分GPS以及激光测距仪等,特别是目前流行的LiDAR技术为地质、地貌学家提供了高分辨率的地形数据。这些高分辨率的数字地形不但为量化分析构造地貌演化过程(Frankel et al.,2007; Hilley et al.,2010),也为辨别历史地震地表破裂遗迹(Kondo et al.,2008; Lin et al.,2013)、提取地表同震位移(Crosby et al.,2007; Prentice et al.,2010; Zielke et al.,2010,2012; Oskin et al.,2012)以及活动构造地质填图等(Arrowsmith et al.,2009)提供了可靠的数据。尽管目前LiDAR测量技术(包括
机载测量和陆基测量方式)是获取高分辨率地形数据的有效方法,高昂的测量成本和复杂的后期数据处理却限制了LiDAR技术的大众化应用。
近年来,被称为“Structure from Motion”(下文简称为SfM)的新型数字摄影测量技术成为一种低成本、高效率的获取3维地形数据的有效方法(Matthews,2008; Westoby et al.,2012; Fronstad et al.,2013)。该方法利用高效的特征匹配算法(feature matching algorithms)从多视角照片中提取重叠区域的3维地形数据。由于SfM方法仅需要目标物体的照片就可以快速获取高质量的3维地形数据,而对相机拍摄位置、图像尺度及拍摄焦距没有要求,所以该方法已经被应用到多个地学研究领域中,如冰川消融分析(Baltsavias et al.,2001)、河流地貌分析(Bird et al.,2010)以及微构造地貌解译(Johnson et al.,2014)。在植被稀少区域,SfM方法获取的3维地形数据质量可以与LiDAR数据媲美,甚至优于LiDAR数据(Harwin et al.,2012; James et al.,2012),而测量成本却远远低于LiDAR技术。
本文将首先简要介绍SfM测量原理,然后利用“机载激光雷达(LiDAR)独山子逆断裂背斜高精度地形数据采集”项目LiDAR测量过程中所拍摄的地形照片,实例介绍SfM方法获取高精度3维地形数据的流程,同时与LiDAR数据进行对比,评估SfM地形数据的质量。为了评估在不同地貌类型条件下SfM数据的精度,选取的区域包含了山地、冲沟、洪积扇和阶地地貌类型。最后,简单介绍了由氦气球、普通相机所组成的低成本SfM测量系统以及野外测量步骤和效果,并讨论了SfM测量相对于LiDAR测量的优缺点。
1 SfM技术方法
SfM方法利用“立体摄影测量(Stereoscopic photogrammetry)”的基本原理,从重叠图像中自动提取目标物体的数字3维模型,以及成像照相机的运动参数与场景的结构信息。为了确定空间对象的3维坐标,传统摄影测量方法要求相机的方位和一系列控制点的空间坐标是已知的,这需要在图像中通过人工方式确定控制点的位置,利用“后方交会”(如图1中的实直线)来确定相机位置。然而,SfM与传统摄影测量存在本质上的不同,不需要上述已知条件进行场景重构。SfM方法基于像对间的特征匹配数据,通过迭代光束平差过程(Iteratve Bundle Adjustment Procedure)自动求解相机方位和场景几何形态等信息(Snavely,2008)。这些特征从一幅图像跟踪到另一幅图像,初步估计相机位置和目标物的坐标,并采用后续的非线性最小二乘算法不断优化(Snavely,2008)。该方法的实现得益于高效的自动特征匹配算法的发展,非常适合于利用一组重叠高、视角多变的图像来重构数字3维景观(Lowe,2004)。
与传统摄影测量方法不同,由于SfM解算出的相机位置缺乏尺度和方位信息,以至于生成的3D点云数据只具有图像空间坐标系,因此必须将其转变到现实世界的空间坐标系中。在大多数情况下,SfM图像坐标系转换为现实世界坐标系需要已知少量的地面控制点(Ground Control Point,GCP),使用3D相似性转化即可实现。首先,选取在SfM点云和野外场地都比较清晰的地物作为GCP点,并通过野外测量获取他们的空间坐标(如利用差分GPS)。然后,利用地面控制点建立图像空间坐标与现实世界空间坐标之间的空间变换矩阵,该矩阵实现SfM点云缩放、平移和旋转等空间变换。最终,可以获得符合现实世界的数字3维模型。
2 测量区域及数据
在天山北麓近EW向展布的独山子逆断裂-背斜带进行LiDAR测量的过程中,同时拍摄了
对应地面的彩色数字照片(图2左半部分所示)。LiDAR航测时间选在10月底入冬前的深秋季节,既有效地减少了植被对地表的遮挡也避免了降雪覆盖地表对航片质量和LiDAR测量的影响。LiDAR扫描带宽约3km,长约22km,同时拍摄的数字照片完全覆盖了LiDAR扫描带。
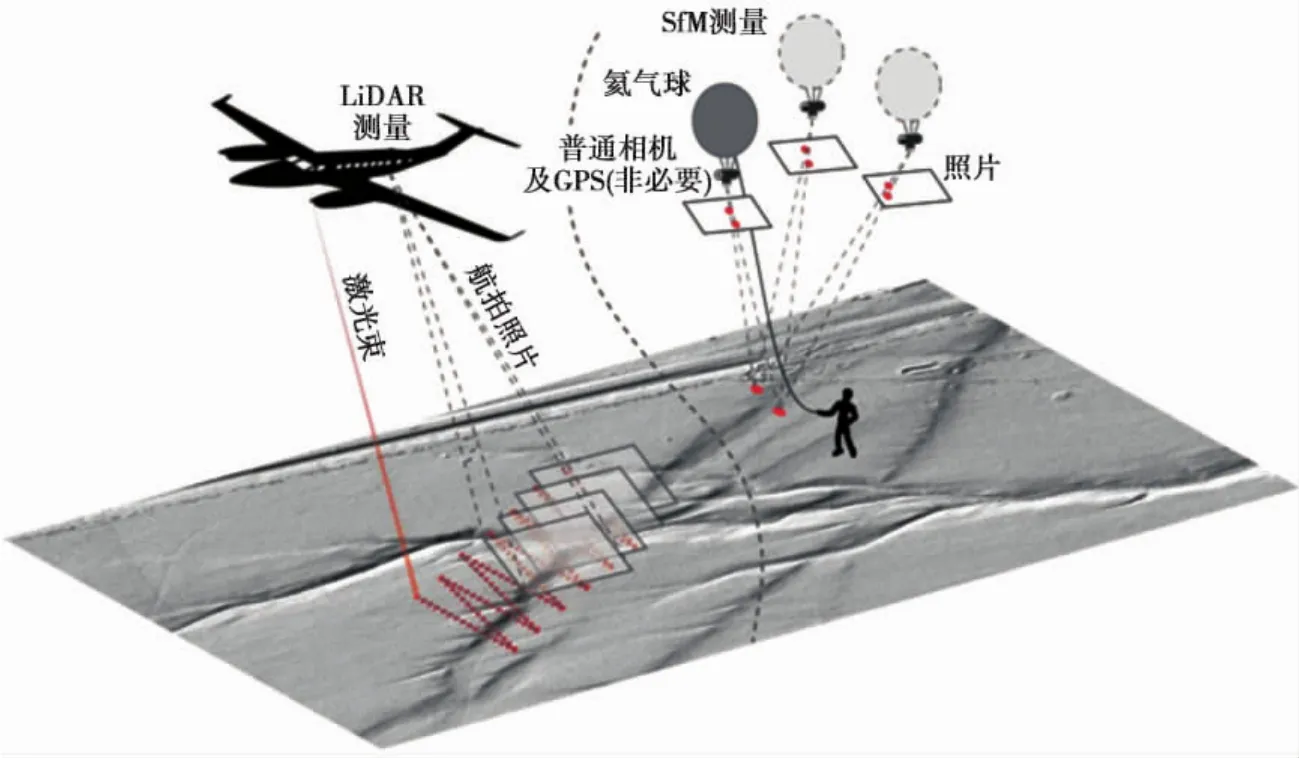
图2 机载LiDAR测量(左)与氦气球SfM测量(右)示意图Fig.2 Schematic illustration of airborne LiDAR(left) and aerial platform-based structure from motion(right).
沿断裂带展布方向进行8次飞行扫描,目标区内任何位置被扫描2~3次。扫描区原始Li-DAR点云密度为6.9个/m2,平均点间距为0.37m。利用测量精度可达mm级的高精度GPS接收机,我们在目标区内静态测量了12个地面控制点用以测试LiDAR数据精度。计算结果的统计分析显示,LiDAR数据的垂直相对误差分布服从正态分布,均值为0.12m,均方差为
0.078m。
彩色数字照片由51mm固定焦距(Focal Length)、3900万像素(39 megapixel resolution)、6.8μm像元高清晰相机拍摄,拍摄高度在920~960m,采用未压缩TIF(Tagged Image File)格式存储,相邻影像重叠度可达70%。未压缩TIF格式图像可以最大程度地保留图像特征信息,通常在利用SfM方法重构3维场景时,推荐使用TIF格式影像数据。
在LiDAR测区内选取边长约为1500m的区域作为试验区,利用航拍数字照片和SfM方法获取试验区3维地形数据。然后,将SfM方法获得的地形数据与LiDAR技术获得的地形数据进行比较,评估SfM方法的精度。为了查看SfM测量方法应用在不同地貌区域是否存在精度差别,选取的试验区包括4种地貌类型——地势起伏的山地、冲刷侵蚀严重的黄土地貌、地形平缓的山前冲洪积扇和河流阶地,并分别进行了SfM数据精度的评估。
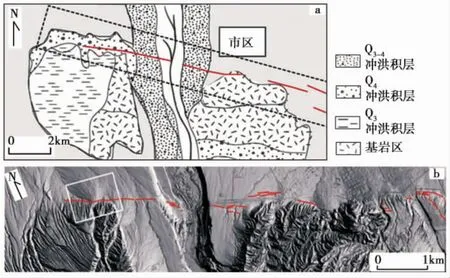
图3 独山子背斜-逆断裂地质简图(a)及LiDAR测量区(b)Fig.3 Geological sketch of Dushanzi anticline-reverse fault zone(a) and the LiDAR measurement area(b).
3 SfM技术流程
商业软件Photoscan实现了用SfM方法构建具有地理坐标的SfM 3维地形数据,Verhoeven (2011)详细介绍了相关技术流程和相关算法。Photoscan软件是一套基于静态图像构建高精度3D模型的专业软件。首先,PhotoScan使用高效的图像特征匹配及跟踪技术寻找和匹配不同图像间的公共点,然后,该软件利用这些公共点自动解算图像的空间位置,并根据立体摄影测量方法重构3D场景,被重构的区域至少在2个不同视角的图像中可见。Photoscan软件的最大优势是它集成了所有SfM数据处理流程,而其他方法需要结合多个独立的程序才能建立最终的SfM 3维地形数据,Westoby等(2012)和Fonstad等(2013)详细介绍了一些免费开源软件的SfM数据处理流程。
Photoscan软件利用数字照片集构建3维地形数据,包含4步:
(1)将照片导入Photoscan软件。在导入之前,检查照片质量,剔除图像模糊、严重变形、色彩异常的照片,以免影响SfM数据精度。通常,存储在照片文件内的EXIF(Exchangeable Image File)元数据,如焦距、ISO速度、光圈值和GPS坐标(如果相机具有GPS功能),也会导
入到Photoscan软件中,这些元数据可以加快数据处理速度和提高计算精度。
(2)照片之间进行特征匹配和跟踪,重构3维景观(图4a)。在该阶段,Photoscan软件可完成SfM的3维数据解算,计算结果为点云数据(图4b)。由于SfM点云是由数字彩色影像解算出来的,因此SfM点云可以被赋予影像的真彩色,而LiDAR点云是由传感器接受激光束反射波计算出来的,因此LiDAR点云不能表现真彩色的地表纹理特征(图4c)。

图4 Photoscan生成高密度点云的透视图(a) ; SfM点云数据,点云密度约为25个/m2,并用照片像素着色(b) ; LiDAR点云数据,点云密度约为6个/m2(c)Fig.4 Perspective view of the final photoscan high-density point cloud colored by photos (a) ; Local SfM point cloud inside the black polygon in a (b) ; airborne LiDAR point cloud in the same region as b (c).
(3)将野外测量的地面控制点(GCP)输入到Photoscan软件中,将3维数据从图像空间坐标系变换为现实世界空间坐标系。在选取GCP点时,通常布置在高对比度、可清楚确定中心位置的目标,这样可以提高图像坐标和空间坐标的匹配度和可靠性。该阶段,可以将3维数据导出为ASCII或LAS格式的点云数据,进而可以利用其他软件处理和分析。
(4)生成具有地理坐标系的DEM及正射影像数据。尽管Photoscan软件可以生成DEM,但是DEM数据不平滑。推荐做法是利用导出的点云数据,使用其他优化DEM生成的专业软件(如ArcGIS,Point2Grid)制作DEM数据。
4 SfM结果及分析
4.1 SfM点云
通过对数字照片的检查和筛选,共选取了52幅重叠覆盖整个试验区的航拍照片(图3b中的白色框)。图5a显示了每幅照片的位置(图中黑点表示图像中心在地面的投影位置)和覆盖范围,照片重叠密度图显示试验区(图5a中的黑框)从不同角度至少被拍摄6次。

图5 航拍照片重叠密度图(a)和SfM-DEM晕染图(b)Fig.5 Density map of photograph(a) ; SfM-DEM produced with the photoset collected by plane(b).
SfM结果为点云数据,该点云数据除了具有空间属性(x/y/z坐标)外,还具有与照片像素对应的颜色属性(红/绿/蓝,RGB值),这一点明显优于LiDAR点云数据。LiDAR点云只具有强度属性信息,不能表现真彩色点云。SfM点云的真彩色属性使得点云数据更具有立体感和真实感(如图4a所示),而且颜色属性便于区分不同地物的点云。如图4b为SfM点云数据,目视解译根据点云颜色可以区分地表(浅色点云)和植被(深色点云),这在去除非地面点方面具有潜在的应用价值;而图4c展示的是与图4b相同位置的LiDAR点云数据,由于LiDAR点云不具有颜色属性,尽管利用强度属性可以渲染点云纹理特征,也很难从视觉上清晰地区分不同地物的点云。点云的密度和数据精度是地貌量化分析更关心的问题。下面通过与LiDAR数据的对比,分析SfM点云的数据质量。
4.2 SfM-DEM分辨率
通过统计点云数量和覆盖面积,SfM点云平均密度为25.5个/m2,远高于LiDAR点云平均密度6.9个/m2。图4b和c展现了相同地面范围上SfM点云与LiDAR点云点数量的对比,SfM点云具有更高的分辨率和更多细节的表现。为了便于表现地形和量化分析地貌特征,将不规则离散的点云插值成网格化数据模型——DEM,点云密度约束着DEM的网格尺寸(Langridge,2013)。根据点云密度与DEM最佳网格尺寸的经验关系(Hu,2003) S = 1/槡? d (S为DEM网格大小,单位: m; d为点云密度,单位:个/m),SfM点云生成DEM的最佳网格尺寸为0.2m。我们采用反距离权重局部面元方法生成SfM-DEM(图5b),该DEM模型可以清晰地表
现洪积扇上的小尺度冲沟(图5)。Arrowsmith等(2009)详细介绍了反距离权重局部面元原理和使用,并讨论了搜索半径对DEM分辨率的影响。
为了展示SfM数据与LiDAR数据在分辨率上的差别,将图4b,c中的SfM和LiDAR点云分别生成网格尺寸为0.2m和0.5m的DEM。通过对比,无论是0.2m还是0.5m的SfM-DEM都可以清楚地表示地表冲沟,而且岸边的灌木形态也很清晰。但是对于LiDAR-DEM,当网格尺寸为0.2m时,DEM已经不能清楚地表示地貌形态;当网格为0.5m时,地面上的主要冲沟可以表现出来,但是更小的冲沟已变得模糊。这也说明,SfM点云可以生成0.2m分辨率的DEM,而LiDAR-DEM只能生成0.5m分辨率的DEM。
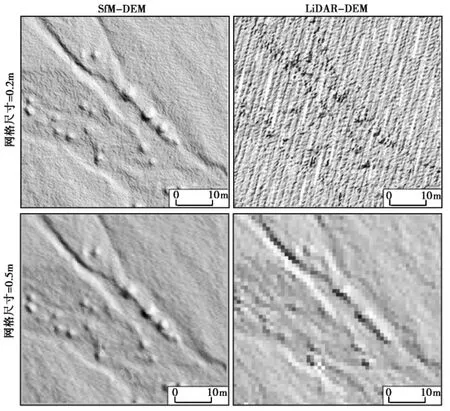
图6 SfM与LiDAR数据生成的网格大小分别为0.2m和0.5m的DEM对比Fig.6 Comparison of DEM with grid size of 0.2m and 0.5m derived from SfM and LiDAR.
4.3 SfM数据精度
数据精度是评价数据质量好坏的标准之一,SfM数据精度决定着SfM 3维数据是否可以用于地貌定量化分析。本文将SfM点云与LiDAR点云进行对比,利用2类点云之间的垂直偏差评估SfM 3维数据的精度。SfM数据与LiDAR数据都是离散的点,很难找到具有相同平面坐标的点计算垂直偏差。我们使用开源软件CloudCompare完成SfM与LiDAR之间的比较。该软件首先将一类点云设定为参考点云(Reference Data),另一类点云做为比较点云(Compared Data),然后以比较点云中的每个点为圆心,不断扩大搜索半径,直到在参考点云中寻找到距离最近的参考点,以最近点对之间的垂直距离作为2类数据的垂直偏差。由于SfM点云密度比LiDAR点云密度高,为了保证偏差最小化,将SfM点云设定为参考点云,而LiDAR点云设定为比较点云,为LiDAR数据中的每一个点寻找一个最近的SfM点(图7箭头所示),然后计算
点对之间的垂直分量(图7中的v1,v2,…),该垂直分量代表了SfM数据相对于LiDAR数据的垂直偏差。

图7 计算SfM与LiDAR数据垂直偏差方法的示意图Fig.7 Schematic diagram of calculating vertical deviation between SfM and LiDAR.
利用上述方法计算实验区以及试验区内不同地貌范围的SfM数据与LiDAR数据之间的垂直偏差,试验区范围如图2和图5所示。图8a展示了试验区内垂直偏差的分布,从图8可以看到2条明显的NW向线状特征,这是由于不同测线的LiDAR数据之间存在误差造成的,而不是SfM数据存在内部误差。图8b为试验区内垂直偏差的分布,表明58.3%的LiDAR数据与SfM数据的垂直偏差<0.1m,88.3%的LiDAR数据的垂直偏差<0.2m。对于不同地貌类型,垂直偏差存在差异。阶地面和冲积扇具有相近的偏差分布(图8c,d),约65%的垂直偏差<0.1m,约95%的垂直偏差<0.2m;山区具有最大的偏差分布(图8e),40.0%的垂直偏差<0.1m,76.3%的垂直偏差<0.2m;黄土侵蚀地貌具有中等的偏差,47.8%的垂直偏差<0.1m,86.3%的垂直偏差<0.2m。从垂直偏差分布可以看出,SfM方法获得3维地形数据的精度对于不同地貌存在差异。在相对平坦的地形,SfM方法可以获得准确的3维地形数据,随着地势起伏或地表大型冲沟的增加,SfM数据精度降低。这可能由于陡峭的地形形成阴影造成航拍照片不清晰而引起的误差。
SfM数据的精度与地形照片拍摄的高度和照片密度相关,降低拍摄高度和增加照片密度可以提高SfM点云密度和数据精度(Westoby et al.,2012)。James等(2012)比较了从约数十米高处拍摄海岸地形照片获取的SfM数据与dGPS观测点之间的垂直和水平误差不超过10cm。Arko等(2013)利用SfM方法持续观测滑坡体运动,通过对比不同时期的SfM数据可以获得cm级的滑坡体运动数据,该研究表明SfM的数据精度与陆基LiDAR测量数据相当。
5 简易气球SfM测量系统
上文介绍了SfM测量原理和流程,利用独山子褶皱-断裂带的航拍地形照片生成SfM数据并测试了其分辨率和精度。SfM数据具有非常高的分辨率和精度,完全可以与LiDAR数据相媲美,而且SfM方法仅需要地面照片,对相机拍摄方位、图像尺度及拍摄焦距没有要求。因此,如果利用一种更加简单的测量平台采集地面照片,就可以获取高质量的3维地形数据,与LiDAR数据成本相比较,可以大大降低获取高精度数据的成本。目前已有学者尝试利用小型滑翔机(Harwin et al.,2012; Niethammer et al.,2012)、固定翼飞行器(Doleire et al.,2012)和氦气球(Fonstad et al.,2013)承载相机在高度几百米~几十米高空进行地面拍摄(图9),然后利用SfM方法获取高精度3维地形数据。
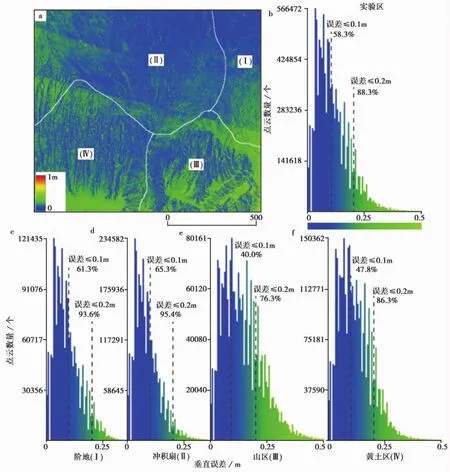
图8 SfM与LiDAR数据间的垂直偏差统计图Fig.8 Statistic chart of vertical deviation between SfM and LiDAR.
美国亚利桑那州立大学(ASU)的Arrowsmith J R教授组装了一套简单的SfM测量系统。该SfM测量系统以氦气球作为拍摄平台,氦气球体积约4m3,底部可以悬挂相机固定装置,使得相机镜头垂直于地面(图9) ;相机为普通数码相机,1千万像素,4mm焦距;相机被设置为固定时间间隔拍摄模式,通常时间间隔为5~10s。作者利用该氦气球SfM测量系统对一地表破裂带进行野外实地测量(35.65°N,111.61°W,1700m)。在照片采集过程中,牵引氦气球沿破裂带迹线往返移动(图2右半部分所示)。拍摄照片高度影响SfM数据点云密度,拍摄高度越低,SfM点云密度和DEM分辨率将会越高,但是单幅照片覆盖范围及照片之间的重叠度变小,
相同范围地形需拍摄更多照片。图9显示一个基于简易气球平台的SfM测量实例,设定拍摄高度为150~200m,在野外现场选取28张照片(图9b)提取点密度高达45个/m2的SfM点云数据,制作的分辨率为0.2m的SfM-DEM和正射影像(图c,d)清晰地显示出约200m长的地表破裂带和其他相关地貌。这套基于氦气球的简易SfM测量系统操作简便,从仪器组装到完成DEM制作仅花费3h,相比目前常用的差分GPS测量具有更高的效率和数据精度,而且还可以同时获得高分辨率的正射影像。

图9 氦气球SfM测量系统及其测量数据Fig.9 Photographs showing the helium balloon SfM measuring instrument and its measurement data.
6 SfM技术方法的优势和不足
SfM技术方法可以获得类似于LiDAR的3维地形数据,应用在LiDAR数据上的地形地貌分析方法都可以应用在SfM数据上,因此,SfM方法在微构造地貌分析、地表破裂带调查和活动断裂填图方面具有广泛的应用前景。由于SfM方法简单易用,可以快速获得3维地形数据和正射影像,所以可以应用在震后地表破裂带调查和同震测量上。如果在震前和震后分别采集活动断层的地形照片,通过对比震前和震后的SfM数据可以获得详细的地表变形特征,就像Oskin等(2012)利用震前和震后LiDAR数据分析地表破裂带变形特征一样,但是数据成本和效率比LiDAR方法优越得多。
相对于LiDAR技术,SfM方法具有许多优势,如低成本,操作简单,可以获得高密度的真彩色渲染点云数据。然而在实际应用中,SfM方法还是受到许多条件的限制: 1)在植被发育好的区域,由于光线不能穿透植被,SfM测量方法受到限制,而LiDAR技术具有激光束可以通过植被缝隙到达地表的优势; 2) SfM测量易受天气条件影响,如果采用氦气球或小型滑翔机采集数字照片,较大风速不利于控制测量平台,可能导致拍摄的照片偏离目标区。另外,多云的天气常常会导致地面亮度发生变化,导致相同区域的色彩在不同照片上发生变化; 3)由人工采集数据,SfM测量范围受到测量人员体能、相机电池等因素限制,通常在几百米的范围内。对于长达数十km或数百km的地形测量,LiDAR技术更能凸显其优势,毕竟每十几个测量点的点云数据可以满足绝大多数的地貌分析和应用。
7 结论
文章简要介绍了SfM(Structure from Motion)方法的基本原理和流程,通过新疆独山子的实例展示了SfM技术是获取高精度3维地形数据的简单而有效的方法,特别适合于植被稀少的区域。利用“机载激光雷达(LiDAR)独山子逆断裂背斜高精度地形数据采集”项目获得的具有约70%重叠度的一套数字地形照片生成具有真彩色的高密度SfM点云数据,点密度高达25.5 个/m2,可生成0.2m分辨率的DEM。对比相同实验区域的LiDAR点云数据,统计分析表明58.3%的LiDAR数据与SfM数据的垂直偏差<0.1m,88.3%的LiDAR数据的垂直偏差<0.2m,而且发现不同地貌类型的SfM数据精度存在差异,平缓地形的SfM数据精度高于陡峭地形的SfM数据精度。考虑到LiDAR数据本身存在0.12m的垂直相对误差,SfM数据具有与LiDAR数据相同的精度。
SfM方法对相机拍摄位置、图像尺度及拍摄焦距没有要求,因此利用简单测量平台采集地面照片就可以获取高质量的3维地形数据。与LiDAR数据成本相比较,大大降低了获取高精度数据的成本,使得高精度3维地形数据的使用大众化,但是SfM方法受植被发育程度、天气状况和飞行平台续航能力的限制。
参考文献
Arrowsmith J R,Zielke O.2009.Tectonic geomorphology of the San Andreas Fault zone,from high resolution topography: An example from the Cholame segment[J].Geomorphology,113: 70—81.
Arko L,Steven M,Darren T.2013.Mapping landslide displacements using Structure from Motion(SfM) and image correlation of multi-temporal UAV photography[J].Progress in Physical Geography,38(1) : 97—116.
Baltsavias E P,Favey E,Bauder A,et al.2001.Digital surface modeling by airborne laser scanning and digital photogrammetry for glacier monitoring[J].The Photogrammetric Record,17: 243—273.
Bird S,Hogan D,Schwab J.2010.Photogrammetric monitoring of small streams under a riparian forest canopy[J].Earth Surface Processes and Landforms,35: 952—970.
Crosby C J,Arrowsmith J R.2007.Application of LiDAR data to constraining a late Pleistocene slip rate and vertical deformation of the Northern San Andreas Fault[D].Fort Ross to Mendocino,California.
Doleire-Oltmanns S,Marzol I,Peter K,et al.2012.Unmanned Aerial Vehicle(UAV) for monitoring soil erosion in Morocco[J].Remote Sensing,4: 3390—3416.
Fonstad M A,Dietrich J T,Courville B C,et al.2013.Topographic structure from motion: A new development in photogrammetric measurement[J].Earth Surface Processes and Landforms,38: 421—430.
Frankel K L,Dolan J F.2007.Characterizing arid region alluvial fan surface roughness with airborne laser swath mapping digital topographic data[J].Journal of Geophysical Research,112(F2) : 20—25.
Harwin S,Lucieer A.2012.Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle imagery[J].Remote Sensing,4: 1573—1599.
Hilley G E,DeLong S,Prentice C,et al.2010.Morphologic dating of fault scarps using airborne laser swath mapping (ALSM) data[J].Geophysical Research Letters,37(4) : 367—370.
Hu Y.2003.Automated extraction of digital terrain models,roads and buildings using airborne LiDAR data[D].Department of Geomatics Engineering,the University of Calgary,Calgary,Alberta,Canada.
James M R,Robson S.2012.Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application[J].Journal of Geophysical Research,117.doi: 10.1029/2011JF002289.
Johnson K,Nissen E,Saripalli S,et al.2014.Rapid mapping of ultrafine fault zone topography with structure from motion[J].Geosphere,10(5) : 969—986.
Kondo H,Toda S,Okamura K,et al.2008.A fault scarp in an urban area identified by LiDAR survey: A case study on the Itoigawa-Shizuoka Tectonic Line,central Japan[J].Geomorphology,11: 731—739.
Langridge R M.2013.Developing sub 5-m LiDAR DEMs for forested sections of the Alpine and Hope faults,South Island,New Zealand: Implications for structural interpretations[J].Journal of Structural Geology,64: 53—66.Lin Z,Kaneda H,Mukoyama S,et al.2013.Detection of subtle tectonic geomorphic features in densely forested mountains by very high-resolution airborne LiDAR survey[J].Geomorphology,182: 104—115.
Lowe D.2004.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer,60: 91—110.
Matthews N A.2008.Aerial and close-range photogrammetric technology: Providing resource documentation,interpretation,and preservation[D].Technical Note,Bureau of Land Management,Denver,Colorado.
Meigs A.2013.Active tectonics and the LiDAR revolution[J].Lithosphere,5: 226—229.
Niethammer U,James M R,Rothmund S,et al.2012.UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results[J].Engineering Geology,128: 2—11.
Oskin M E,Arrowsmith J R,Corona A H,et al.2012.Near-field deformation from the El Mayor-Cucapah earthquake revealed by differential LiDAR[J].Science,335: 702—705.doi: 10.1126/science.1213778.
Prentice C S,Mann P,Crone A J,et al.2010.Seismic hazard of the Enriquillo-Plantain Garden Fault in Haiti inferred from palaeoseismology[J].Nature Geoscience,3(11) : 789—793.
Snavely N.2008.Scene reconstruction and visualization from Internet photo collections[D].University of Washington,USA.
Verhoeven G.2011.Taking computer vision aloft: Archaeological three-dimensional reconstructions from aerial photographs with PhotoScan[J].Archaeological Prospection,18: 67—73.
Westoby M J,Brasington J,Glasser N F,et al.2012.“Structure-from-Motion”photogrammetry: A low-cost,effective tool for geoscience applications[J].Geomorphology,179: 300—314.
Zielke O,Arrowsmith J R,Grant-Ludwig L B,et al.2012.High resolution topography-derived offset along the 1857 Fort Tejon earthquake rupture trace,San Andreas Fault[J].Bulletin of the Seismological Society of America,102(3) : 1135—1154.
Zielke O,Arrowsmith J R,Ludwig L G,et al.2010.Slip in the 1857 and earlier large 747 earthquakes along the Carrizo Plain,San Andreas Fault[J].Science,327: 1119—1122.
ACCURACY ANALYSIS OF TERRAIN POINT CLOUD ACQUIRED BY“STRUCTURE FROM MOTION”USING AERIAL PHOTOS
WEI Zhan-yu1)Arrowsmith Ramon2)HE Hong-lin1)GAO Wei1)
1) Key Laboratory of Active Tectonics and Volcano,Institute of Geology,China Earthquake Administration,Beijing 100029,China
2) School of Earth and Space Exploration,Arizona State University,Tempe,AZ 85287,USA
Abstract
The need to acquire high-quality digital topographic data is evident throughout geoscience research.The use of these data elevates the research level of geosciences.Airborne and terrestrial light detection and ranging(LiDAR) are currently the most prevalent techniques for generating such data,but the high costs and complex post processing of these laser-based techniques restrict their availability.In the past few years,a new stereoscopic photogrammetry mapping method called Structure from Motion(SfM) has been applied in geoscience,in which the 3D digital topography is reconstructed using feature matching algorithms from overlapping photographs of multiple viewpoints.SfM only needs a series of overlapping images with no special requirements about the camera positions,orientations and lens parameters,making it possible to use images collected from an affordable SfM platform to rapidly generate high-quality 3D digital topography.This paper summarizes the basic principles and the SfM workflow,and shows that SfM is a low-cost,effective tool for geoscience applications compared to LiDAR.We use a series of digital aerial photos with~70% overlap collected at one-thousand-meter height to produce a textured(color) SfM point cloud with point density of 25.5/m2.Such a high density point cloud allows us to generate a DEM with grid size of 0.2m.Compared with LiDAR point cloud,statistical analysis shows that 58.3% of LiDAR points deviate vertically from the closed SfM point by<0.1m and 88.3% by<0.2m.There is different SfM accuracy in different landforms.The SfM accuracy is higher in low dips and subdued landforms than in steep landforms.In consideration of relative vertical error of 0.12m in LiDAR data,SfM has a higher measuring accuracy compared with LiDAR.
Key words Structure from Motion(SfM),LiDAR,DEM
作者简介〔〕魏占玉,男,1981年生,2010年于中国地震局地质研究所获构造地质学博士学位,研究方向为活动构造与构造地貌,电话: 010-62009031,E-mail: weizhanyu@gmail.com。
doi:10.3969/j.issn.0253-4967.2015.02.024
收稿日期〔〕2014-04-10收稿,2014-05-13改回。
中图分类号:P208
文献标识码:A
文章编号:0253-4967(2015) 02-0636-13