搭载机电控制CVT的混合动力汽车驱动工况调速策略
2015-02-17胡经庆
叶 明,彭 江,任 洪,胡经庆,程 越
(a.汽车零部件先进制造技术教育部重点实验室;b.重庆理工大学 车辆工程学院,重庆 400054)
搭载机电控制CVT的混合动力汽车驱动工况调速策略
叶 明a,彭 江b,任 洪b,胡经庆b,程 越b
(a.汽车零部件先进制造技术教育部重点实验室;b.重庆理工大学 车辆工程学院,重庆 400054)
通过分析搭载机电控制CVT的插电式混合动力汽车的特点,确定单轴并联式传动方案。根据整车不同驱动工况下电池的荷电状态以及整车需求功率的要求,综合考虑系统效率,制定不同驱动工况下能量分配策略以及CVT速比策略,从而提出一种机电控制CVT混合动力汽车驱动工况调速策略。通过Matlab/Simulink和ADVISOR建立PHEV整车模型和调速策略,在NEDC工况下进行仿真。仿真结果表明:制定的调速策略使得驱动工况扭矩得到合理分配,进一步提高了电机和发动机的工作效率,最终使得整车在满足动力性的同时油耗得到明显的降低。
机电控制CVT;混合动力汽车;调速策略
插电式混合动力汽车(PHEV)融合了传统内燃机汽车和纯电动汽车的优点,既可降低燃油消耗、减少汽车尾气污染,又可以使用外接电网充电,实现更长的纯电动续航里程,是国际上新能源汽车研发的热点[1]。插电式混合动力汽车装备的变速器可以对动力源(发动机和电机)工作区域进行优化,充分发挥自身性能。无级自动变速器具有无级变速功能,可连续调整动力源工作区域,因此很多混合动力车型装备了无级自动变速器。传统的电液式无级自动变速器需要液压系统,动力由发动机提供,效率相对较低,制造成本相对较高。具有纯电动工况的混合动力车系统无法在纯电动工况下持续保证足够的油压。如果另外加装供油系统,不仅使得成本增加,还会造成控制上的不便,限制了传统电液式无级自动变速器在新能源电动汽车上的应用。机电控制无级自动速器(electric-mechanical CVT,EMCVT)采用碟簧压紧和电机调速,不需要液压系统,可很好地解决这一问题[2]。
本文对插电式混合动力汽车动力总成的结构特点和性能进行综合分析,提出新型并联式动力总成结构。插电式混合动力汽车开发的主要核心技术之一是要很好地分配传动系统的能量流,控制车辆的工作模式,从而达到更好的整车经济性[3]。为此,本文在搭载新型EMCVT的插电式混合动力汽车能量管理策略的基础上进行了整车驱动工况调速策略的研究。
1 混合动力汽车系统组成
1.1 机电控制CVT结构
EMCVT结构原理如图1所示。EMCVT的结构主要包括驱动机构、夹紧机构和金属带传动装置。动力传递方式和传统电液控制CVT相同,仍然采用金属带和带轮实现。但调速和夹紧则采用由电机与齿轮减速器及丝杆螺母机构组成的机械电子调速驱动机构实现。该机构推动主动带轮动盘做轴向移动,从而改变金属带的有效工作半径,实现速比的调节[4]。夹紧力则通过碟簧机构实现。该系统结构简单,制造水平的要求不高,可靠性好。插电式混合动力系统搭载EMCVT时,不需要单独构建液压系统来满足纯电动工况动力传递的需要,整个系统的结构和控制都得到简化。

1.调速电机;2.齿轮减速机构;3.丝杆螺母机构;4,7.碟簧;5.主动带轮动盘;6.从动带轮动盘
1.2 动力系统结构组成
本文所研究的PHEV搭载EMCVT后采用单轴并联式混合动力系统。这种动力系统是目前很有发展前景的一种混合动力结构,它省去了通过机械方式进行动力耦合的复杂装置,具有结构简单、改装方便等优点,其结构示意图如图2所示。发动机与ISG电机之间有一个自动离合器,ISG电机直接与EMCVT相连,再通过差速器将动力传递到车轮,发动机在启动时采用传统的启动电机,通过12 V车载电池供能。
2 主要部件数学模型的建立
2.1 发动机模型
在稳态输出条件下,转矩随节气门开度α和发动机转速ωe变化的数值模型如图3所示。由于发动机动态转矩的变化量与发动机的曲轴角加速度是呈线性的关系,因此可以得到发动机动态转矩特性与稳态转矩特性的关系[3]:
式中:Te为发动机稳态转矩;TD为发动机瞬态转矩;ωe为曲轴角速度;γ为转矩下降系数。

1.发动机;2.自动离合器;3.ISG电机;4.EMCVT;5.动力电池组;6 .12V电池;7.启动电机

图3 发动机数值模型
发动机高效区的高、低转矩值可以根据发动机的万有特性曲线来确定。图4为某汽油发动机最佳燃油经济性曲线图,采用等效率曲线表示,同一条曲线上的效率相同,最内层效率最高,越往外效率越低。效率曲线图的上边界线构成发动机最大转矩曲线。
2.2 ISG电机模型
本文所使用的电机为永磁同步电机。永磁同步电机具有能量密度高、转动惯量小、效率高的特点,并且具有很好的可控性。永磁同步电机还可作为发电机使用,简化了整车结构。根据实验数据,通过插值法能得到电机转速ωm与电机输出转矩Tm、电机效率ηm的关系。ISG电机数值模型如图5所示。
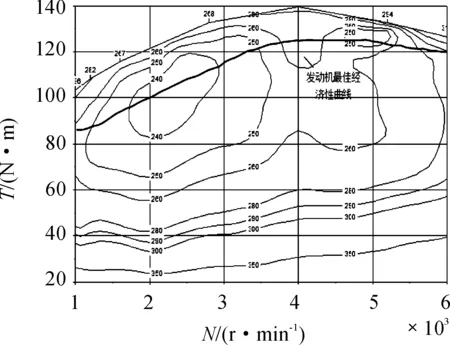
图4 发动机最佳经济性曲线

图5 ISG电机数值模型
电机的响应速度始终快于EMCVT的速比响应。当油门踏板开度瞬间变大,尤其是处于起步阶段的瞬态工况时,由于电机响应速度快,会迅速提升转矩至该转速下的最大值,然后CVT速比才会开始变化,这就克服了对瞬时转矩要求高的不足。电机最佳工作曲线如图6所示。

图6 电机最佳工作曲线
2.3 EMCVT数学模型
机电无级变速器速比一般定义为主动轮转速与被动轮转速的比值:
式中:np为主动锥盘组转速;ns为从动锥盘组转速;imin≤iCVT≤imax。
CVT速比的控制目标是在满足车辆驱动需求时实现混合动力系统效率最大。可基于各种工况模式下已知的最佳工作曲线,根据需求功率确定最佳工作点对应的混合动力系统的转速[6],由以下公式计算CVT速比:
式中:r为车轮滚动半径;i0是除了CVT以外的固定传动比;v为车速。
本文所研究EMCVT的速比范围为0.45~2.2,通过传动效率实验台得到的数据,在输入转矩20~100 N·m下,得到EMCVT各工作点的传动效率。根据实验数据,建立了EMCVT关于输入转矩和速比传动效率数值模型[7],如图7所示。根据20~100 N·m实验数据可以计算推断出EMCVT的平均传动效率为92%。

图7 EMCVT关于输入转矩和速比传动效率数值模型
2.4 电池模型
为了提高电池的充放电效率,延长电池寿命,需要合理设置电池荷电状态SOC的工作范围。电池SOC的上、下限值可以根据SOC与电池内阻的关系曲线来确定。由于电池的充放电效率与电池的内阻有关,故电池SOC的工作区间选为充放电内阻相对较低的区域,以减少电池的充放电损失,提高能量转换效率[5]。通过本研究的混合动力车所用磷酸铁锂电池充放电实验,得到电池SOC值与电池内阻的实验相应关系,如图8所示。根据所示的电池内阻曲线得到该组电池SOC值的上下限范围为0.45~0.85。

图8 磷酸铁锂电池充放电内阻曲线
3 整车调速策略设计
3.1 能量管理策略系统设计
混合动力汽车能量管理策略设计是整车控制的核心,它的目标是在满足整车动力性和其他性能的前提下,针对各总成部件特征和行驶路况,实现发动机和电机功率的合理分配,以此获得混合动力系统最佳的能量效率[6]。本文针对PHEV的特点,对基于规则的多层次逻辑门限值控制策略进行研究,从而使得搭载EMCVT的插电式混合动力汽车能量管理策略分配满足要求。
基于规则的稳态控制策略主要是依据工程经验,通过一组静态参数限定发动机的工作区域,根据预先设定的规则来选择混合动力系统的工作模式,并根据部件的稳态效率图来确定发动机和电动机之间的转矩分配,实现降低油耗和减少排放的目的。
PHEV整车驱动工况包括电池电量消耗模式(charge depleting,CD)和电池电量保持模式(charge sustaining,CS)。本文所研究的插电式混合动力汽车驱动工况可以分为 4个工作模式:① 电机驱动模式;② 发动机驱动模式;③ 发动机和电机混合驱动模式;④ 行车充电模式[10]。
3.1.1 电池电量消耗型控制策略
在电池电量消耗阶段,当车辆需求功率(Pr)较低时由电机单独驱动。当车辆需求功率达到发动机开关门限值(Ps)时,发动机启动,电机辅助发动机一起工作。在发动机工作的过程中,电机维持恒定机械输出功率,直到SOC值下降到目标值(SOCobj)附近。这一阶段,发动机的开关门限值和电机提供的功率决定了发动机和电机的工作状态。发动机开关条件由车辆需求功率、电池SOC值、电池SOC上下限值、发动机开关门限值共同决定。
在电量消耗模式下,为了最大程度利用电池能量,设有发动机单独驱动和发动机主动充电模式。混合驱动时SOC大于SOCmin,车辆需求功率大于电机最大功率Pemax,此时根据电机能够提供的功率Pc和发动机的最佳经济性曲线确定发动机的工作点,从而得到发动机提供的功率Pe。电量消耗运行状态以及切换条件见表1[1-2]。

表1 电量消耗运行状态以及切换条件
3.1.2 电池电量保持型控制策略
在电量保持阶段采用发动机优化曲线控制策略。从静态条件下的发动机万有特性出发,找出发动机比油耗低的曲线,并跟踪由驱动条件决定的发动机优化曲线,避免发动机工作在效率低的区域,从而实现整车控制。在控制过程中还要通过发动机主动充电和电机辅助工作使电池状态限制在目标SOC值附近。这个时候要限制电机功率输出,在车辆低速匀速行驶过程中,在发动机驱动整车的同时给电池充电,使电池SOC维持在一定的数值范围内,SOC波动范围在5%左右。此时电池SOC处于25%,可以满足车辆混合驱动模式下的功率需求。电量保持运行状态以及切换条件如表2所示。
表2中:SOCmin,SOCmax,SOCobj分别为电池荷电状态最小值和最大值目标值;Tr,Te,Tm分别为车辆需求转矩、发动机转矩、电机转矩;Tmmin,Tmmax分别为电机扭矩最小值和最大值;Temin,Temax,Teopt分别为发动机扭矩最小值、最大值和最佳转矩。
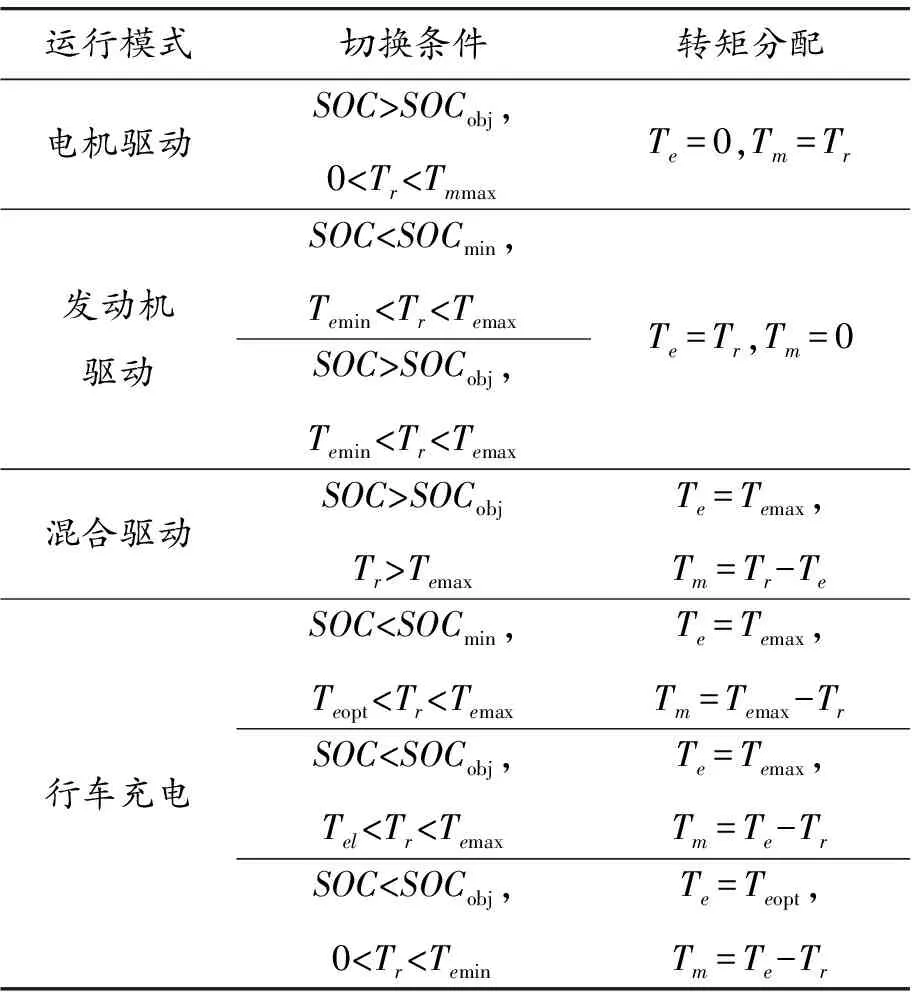
表2 电量保持运行状态以及切换条件
3.2 各个驱动工况调速策略制定
速比控制的原则就是在油门踏板开度以及车速变化的时候,根据VCU采集的油门踏板开度以及车速信息,实时准确地计算出目标速比,通过速比的快速改变使驱动部件(发动机、电机)的实际转速在尽可能短的时间内达到目标转速。EMCVT目标速比、EMCVT输入轴转速以及汽车车速三者之间的关系为[7]
式中:r为车轮半径;nmb为CVT输入轴转速;i为EMCVT目标速比;i0为主减速比;v为汽车车速。
在此控制策略中,将油门踏板开度定义为驱动部件总的目标输出功率,得到EMCVT动力性与经济性折中的速比控制策略如下:假设驾驶员控制油门踏板,保持车辆前进;在油门踏板开度稳定后,即可以确定当前车辆驱动部件目标输出功率P;而后根据系统效率最佳控制策略,找到动力系统的最佳工作点(n,T),再结合当前车速,就可以计算出无级变速器的目标速比i,使系统效率最高。根据上述分析,无级变速器的目标速比根据下式确定[8]:
其中:nm为EMCVT输入轴转速;nout为EMCVT输出轴转速;imax,imin分别是EMCVT速比的上限和下限。
在Matlab/Simulink/Stateflow仿真环境下,针对动力系统不同的工作模式确定工作模式转换条件及功率分配能量管理策略,由以上能量管理策略确定不同工作模式中动力系统主要部件的最佳工作曲线,合理控制发动机和电机之间的转矩分配。通过两者的转矩分配计算出EMCVT的相应速比,最终确定整车调速策略。以电机单独驱动工况为例得到的调速策略,如图9(a)所示,为电量消耗型混合驱动调速策略。电量保持型下电机驱动、发动机驱动、混合驱动、行车充电的调速策略最终整合成如图9(b)所示的驱动工况调速策略。

图9 PHEV的整车调速策略
3.3 仿真并分析
通过Matlab/Simulink/Stateflow建立PHEV整车调速策略,将制定的调速策略导入到ADVISOR中进行联合仿真,分析建立的逻辑门限值能量管理控制策略以及整车调速策略的合理性。
本文在ADVISOR仿真平台下通过修改PHEV系统主要部件的参数,构建并联式混合动力汽车仿真模型,主要部件的仿真参数如表3所示,并结合NEDC工况进行仿真[12]。
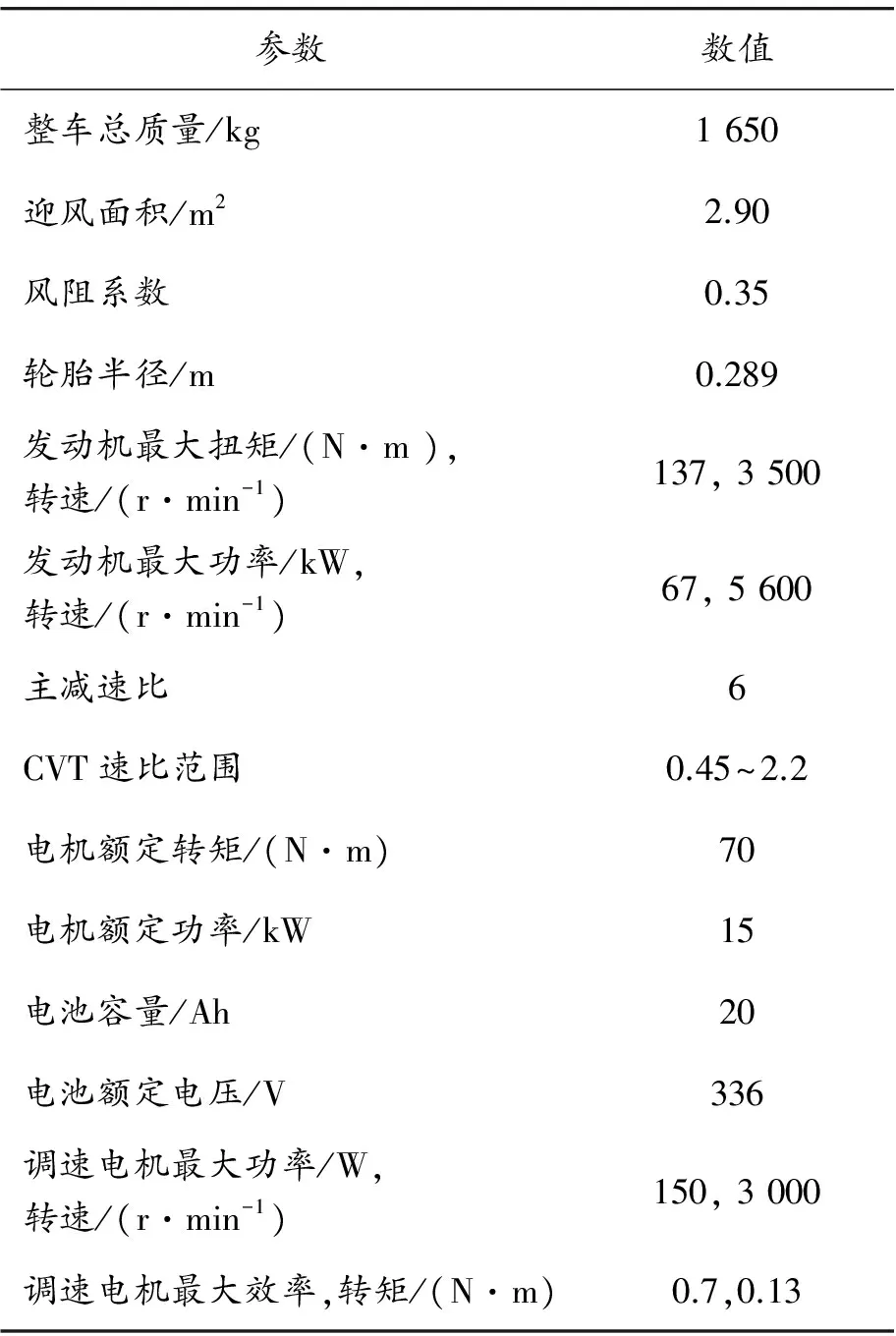
表3 PHEV系统主要部件参数
仿真结果如图10所示。电机和发动机的功率得到分配,电池SOC在电量保持阶段工作在目标值附近区域,燃油经济性得到较大改善。该结果表明这种基于多层次的逻辑门限PHEV能量管理策略以及整车调速策略能够在各个驱动工况下满足车辆动力性能要求,并在此前提下提高了电机和发动机的工作效率,有效降低了混合动力汽车的燃油消耗,并能很好地控制电池组SOC的变化。

图10 仿真环境下各部件的工作曲线
4 结束语
本文在一种多阶段多目标的整车能量管理策略基础上实现了对发动机和ISG电机扭矩的合理分配,提出了既适合EMCVT特殊需要又满足整车控制需求的各个驱动工况调速策略。
采用Matlab/Simulink/Stateflow和ADVISOR在NEDC循环工况下进行联合仿真。仿真结果表明:该型混合动力汽车等效油耗为6.8 L/(100 km),比原传统汽油车节约油耗26%,节油率明显提高。
[1] 叶明,程越,丁锐.搭载机电式CVT 的纯电动系统动力性调速策略[J].机械传动,2012,36(6):29-33.
[2] 叶明,程越.电驱动无级自动变速传动动态控制研究[J].机械传动,2011,35(2):9-12.
[3] 叶明.基于机械自动变速的轻度混合动力传动系统综合控制研究[D].重庆:重庆大学,2006.
[4] 秦大同,刘东阳,杜波,等.重度混合动力汽车驱动模式切换动力源转矩协调控制[J].公路交通科技,2012,29(7):151-157.
[5] 叶明,程越.电驱动无级自动变速传动动态控制研究[J].机械传动,2011,35(2):9-12.
[6] 程乃士.汽车金属带式无级变速器:CVT原理和设计[M].北京:机械工业出版社,2008.
[7] 杨新桦,蒋强,程越,等.电机控制的金属带式无级变速器速比变化特性的仿真研究[J].汽车工程,2012,34(4):320-322.
[8] 杨新桦.金属带式无级变速器控制系统和控策略研究[D].武汉:华中科技大学,2010:15-17.
[9] 骆顺志,程越,李鑫.机械电子控制金属带式变速器速比控制及仿真[J].重庆理工大学学报:自然科学版,2011,25(8):14-20.
[10]叶明,舒红,陈然.插电式混合动力客车工作模式切换控制研究[J].中国公路学报,2012(1):141-145,158.
[11]严运兵,颜伏伍,杜常清.并联混合动力电动汽车动态协调控制策略及仿真研究[J].中国机械工程,2010,21(2):126-131.
[12]曾小华,王庆年,李骏,等.基于ADVISOR2002混合动力汽车控制策略模块开发[J].汽车工程,2004,26(4):394-396,416.
(责任编辑 刘 舸)
Driving Shifting Strategy of Hybrid Electric Vehicle Equipped with Electric-Mechanical CVT
YE Minga, PENG Jiangb, RENG Hongb, HU Jing-qingb, CHEN Yueb
(a.Key Laboratory of Advanced Manufacturing Technology for Automobile Parts,Ministry of Education; b.College of Vehicle Engineering,Chongqing University of Technology, Chongqing 400054, China)
Analyzing the characteristics of hybrid electric vehicle equipped with electric-mechanical CVT(EMCVT), the single-axial parallel transmission scheme was confirmed. According to the requirements of battery state of charge(SOC) and vehicle needed-power running in different driving cycles, comprehensively considering system efficiency, energy distribution strategy and CVT ratio shifting strategy can be achieved, and then vehicle ratio shifting strategy of hybrid electric vehicle equipped with EMCVT was carried out. The whole vehicle model and shifting strategy were built up in Matlab/Simulink and CRUISE platform and simulating in NEDC driving cycles. The results show that this shifting strategy improves motor and engine efficiency, and in this strategy, torque has been well distributed, which makes the vehicle have good power performance and obviously lower fuel consumption.
electric-mechanical CVT; hybrid electric vehicle; shifting strategy
2015-06-20 基金项目:国家自然科学基金资助项目(51275549);重庆市科技攻关计划项目(cstc2012gg-yyjsb6002)
叶明(1976—),男,博士,副教授,主要从事车辆动力传动系统及其控制研究。
叶明,彭江,任洪,等.搭载机电控制CVT的混合动力汽车驱动工况调速策略[J].重庆理工大学学报:自然科学版,2015(9):13-19.
format:YE Ming, PENG Jiang, RENG Hong, et al.Driving Shifting Strategy of Hybrid Electric Vehicle Equipped with Electric-Mechanical CVT[J].Journal of Chongqing University of Technology:Natural Science,2015(9):13-19.
10.3969/j.issn.1674-8425(z).2015.09.003
U469
A
1674-8425(2015)09-0013-07
