3-PSR空间并联机构设计及运动分析
2015-02-15山西中北大学机械与动力工程学院李晓润李瑞琴李大海郝亮亮王明亚随磊
山西中北大学机械与动力工程学院 李晓润 李瑞琴 李大海 郝亮亮 王明亚 随磊
引言
并联机构较串联机构具有其无法替代的优势,对于现代工业的发展具有十分重要的意义。近几十年来,少自由度(2~5自由度)并联机构得到了广大学者的研究,并已发展成其研究领域的主要热点之一。Hunt首先提出了一种3自由度3-RPS并联机构,随后许多新的并联机构相继被研究。但有关3-PSR并联机构的研究相对甚少,本文提出了一种新型3自由度3-PSR并联机构,该机构有3条均匀分布的支链,结构对称,刚度大,可用于研究并联机床微动平台自由曲面零件的加工。
13 -PSR并联机构构型设计及坐标系建立
图1(a)为3-PSR并联机构简图。该机构由上平台B1B2B3(动平台),下平台B1B2B3(静平台)以及3个支链AiSiBi组成。上下平台为两个外接圆半径,分别为r和R的正三角形,3条运动支链均包含一个移动副(P)、球副(S)和、转动副(R)。分别在动、静平台型心点O2和O1建立坐标系O2-xyz(动系)和O1-XYZ(静系),其中z轴和Z轴分别垂直于动平台和静平台,x轴和X轴分别指向点B1和A1,y轴和Y轴按右手定则确定,建立坐标系如图1所示。
23 -PSR并联机构自由度分析
分析该机构,共有构件数n=8;运动副数目g=9,其中移动副、球副、转动副各3个;所有运动副自由度总和。根据机构自由度的Kutzbach-Grübler公式:。这里,F为机构自由度,n为所有构件数目,g为所有运动副数目,fi为第i个运动副自由度数。代入数值可得3-PSR并联机构的自由度F=3。
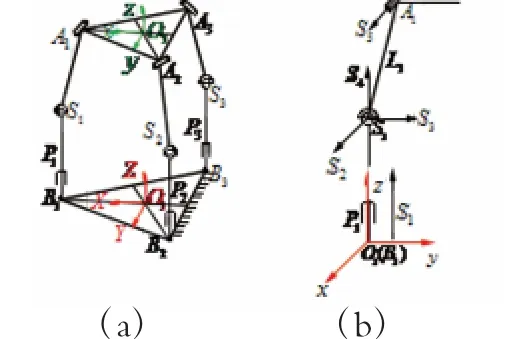
图1 3-PSR 并联机构结构简图及支部螺旋系
3 基于螺旋理论的机构运动分析
利用螺旋理论来分析并联机构的运动是非常简单有效的,因为它可以将运动副用运动螺旋表示,那么一个机构就构成了螺旋系。本文研究的是对称型并联机构,研究三条支链中的其中任意一条,便可推导其他两条支链的运动情况,从而得到整个机构的运动情况。取其中一条支链并建立局部坐标系如图1(b)所示。
该机构的球副S可以用三个汇交不共面的单自由度转动副R来表示,从而得到一条支链上由5个运动副组成,其中一个移动副P、4个转动副R。设B1S1=q1,S1A1=L1,则各运动副轴线的螺旋可表示为:移动副P:1=(000;00q1)
球副S(S=RRR):3=(010;-q100)

其中θ 为A1S1与静平台的夹角,且随着机构运动过程变化而发生数值变化。
由螺旋理论知识可知,螺旋与反螺旋呈互易关系,设该支链的一个反螺旋为:

由互易积定理可知:i,r=0其中i=1,2,…5。代入数值得:r=(100;0q10)。
计算结果表明,这是一个线矢力,方向沿着x轴,不过局部坐标中心点,作用于末端转动副中心。由于机构结构的完全对称性,同理另两条支链同样会各产生一个不过各自局部坐标系中点且垂直于对应yz平面中的某条直线的约束线矢力。这样末端动平台共承受了3个约束线矢力,且方向均垂直于z轴,近一步得知该三个约束线矢力分布于不同平行平面上,限制了动平台沿x、y方向的移动和z向转动,因此可判断动平台只能做二维转动(x、y方向转动)和一维移动(z方向移动)。
4 ADAMS软件下机构运动学仿真
用PROE建立好机构三维虚拟样机后导入ADAMS中,并添加对应的约束和驱动。设置该机构的3个移动副为驱动副,由上述分析可知动平台能实现两个方向的转动和一个方向的平动。
4.1 动平台转动仿真
在ADAMS软件中,设置三个驱动副的运动函数如下:
Motion_1=STEP (time,0,0,2,-30)+STEP (time,3,0,6,30)+ STEP (time,8,0,13,-60)+ STEP(time,14,0,18,45)+STEP(time,21,0,24,-110);
Motion_2=STEP (time,0,0,2,-40)+STEP (time,3,0,6,18)+ STEP (time,8,0,13,-80)+ STEP(time,14,0,18,60)+STEP(time,20,0,23,-105);
Motion_3=STEP (time,0,0,2,-50)+STEP (time,3,0,7,40)+ STEP (time,8,0,13,-5)+STEP(time,17,0,20,80)。
设置运动仿真time=10s, 仿真steps=600,从中可观察到:当三个移动杆不同步运动时,动平台可实现x、y方向转动。
4.2 动平台平动仿真
设置三个驱动副的运动函数相同,均为:Motion_1=Motion_2=Motion_3=-30*sin(time), 同 样 仿 真 time=10s, 仿 真steps=600,观察发现当移动杆同步向上移动时,动平台沿着z轴升高,同步向下移动时,动平台沿着z轴向下降。动平台可实现z向移动。通过仿真证实了3-PSR空间并联机构具有绕x、y轴转动和沿z向移动的3个自由度,仿真姿态图如图2所示。

图2 3-PSR 并联机构动平台运动仿真
对应的动平台质心的位移、速度、加速度曲线如图3所示。
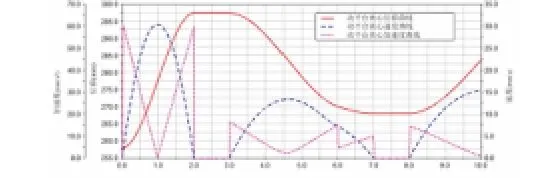
图3 动平台质心位移、速度、加速度曲线
5 结论
本文介绍了一种新型3-PSR并联机构,计算了其自由度,借助螺旋理论分析了该机构能实现的运动形式,即动平台能沿着x、y轴转动和z向移动。建立了该机构的三维虚拟样机并将其导入ADAMS软件进行仿真运动形式验证,结果表明该机构能实现空间2R1T运动,具有3个自由度,并给出了机构在特定运动时的动平台质心位移、速度、加速度曲线能够直观地清楚该机构的输出运动形式。这些工作为今后继续研究该机构的其他方面性能提供了参考依据。
[1]李瑞琴,郭为忠.现代机构学理论与应用研究进展[M]. 北京: 高等教育出版社, 2014, 10.
[2]黄真,赵永生,赵铁石.高等空间机构学[M].北京: 高等教育出版社, 2006, 5.
[3] 刘延斌, 底复龑. 一种新型3-RRRU 并联机构及其运动学分析[J].中国机械工程, 2013,24(4): 476-481.
[4]潘春望,李彬,崔洋等.一种三自由度并联机构的运动学分析[J].天津理工大学学报, 2012, 28(1): 14-17.
[5]黄真,刘婧芳,曾达幸.基于约束螺旋理论的机构自由度分析的普遍方法[J].中国科学E 辑: 技术科学,2009, 39(1):84-93.
