Linux平台下的无线视频寻迹小车
2015-02-15汪正进武风波李国民张文海
汪正进,武风波,李国民,张文海
(西安科技大学 通信与信息工程学院,陕西 西安 710054)
Linux平台下的无线视频寻迹小车
汪正进,武风波,李国民,张文海
(西安科技大学 通信与信息工程学院,陕西 西安 710054)
为研究如何缩小自动寻迹小车的在指定路线上的偏差率问题,采用基于Linux平台下的嵌入式操作系统和无线视频处理相结合的方法。主控单元用2块飞凌公司的32位ARM11系列的S3C6410处理器分别作为服务器和小车的客户端;路径识别单元采用CMOS数字摄像头OV9650进行摄像,通过图像处理单元提取路径信息;驱动控制单元采用SGS公司的L298N芯片。结果表明,通过模糊PID控制算法对舵机转向和速度进行控制,能较好实现小车按预定路线平滑寻迹。为避免Wi-Fi传输信号不好或者说数据量过大,出现严重丢包现象,Wi-Fi传输协议上选择基于数据流式传输数据的TCP协议。经过反复测试,系统路径识别性能良好,运行比较稳定。
Linux;模糊PID控制算法;无线视频;路径识别
0 引 言
随着计算机处理速度和网速的快速提升,再加上各种视频处理技术的优化发展,远程网络视频监控系统开始向智能化、平台化方向发展。目前图像压缩技术的发展也很迅速,推动了视频压缩格式的多样化,如H.264,AVS编码格式等[1]。视频监控在录像存储、图像传输等方面受到视频压缩技术的发展而得到稳步提高。例如利用无线视频技术对供暖设备进行监视和控制,对无人职守区域进行火灾检测和报警以及在煤矿井下利用GIS系统并借助Wi-Fi对人员进行定位等[2-4]。目前在操作系统方面,由于Linux内核的可移植性和开源性,在系统开发上具有较好的实时性和稳定性,便于实际操作[5-7]。再加上嵌入式系统的快速发展,它的软硬件是可裁剪的,它的功能强、可靠性高、体积小、功耗低等优点。它的应用在人们的日常生活中随处可见,例如MP3、智能电器、车载GIS等。目前在煤矿井下,利用嵌入式系统搭建平台对煤矿入井人员进行实时跟踪监测和定位以及对矿井有限空间Wi-Fi信号质量进行检测和评估等[8-10]。
无线视频寻迹小车概念也是伴随着无线视频监控和嵌入式系统的发展提出来的。目前各种寻迹小车在指定路线上运行存在一定的偏差问题。本系统通过飞凌公司的32位ARM11作为核心处理器,采用目前比较流行的视频编解码标准H.264进行编码,再经过Wi-Fi的TCP通信,将视频采集到的实时数据指令等传递给小车服务器进行显示,便于控制和降低无线视频寻迹小车在指定路线上运行的偏差率问题。若今后将无线视频寻迹小车应用于煤矿事故等危险现场的探察工作,能及时准确掌握井下人员的分布和现场情况,提高抢险救灾的效率。
1 系统总体方案的设计
系统采用2个ARM1176JZ内核型号的S3C6410作处理器。分别作为服务器和小车客户端,它们之间通过Wi-Fi的TCP通信协议进行数据指令等的传输,系统整体流程如图1所示。
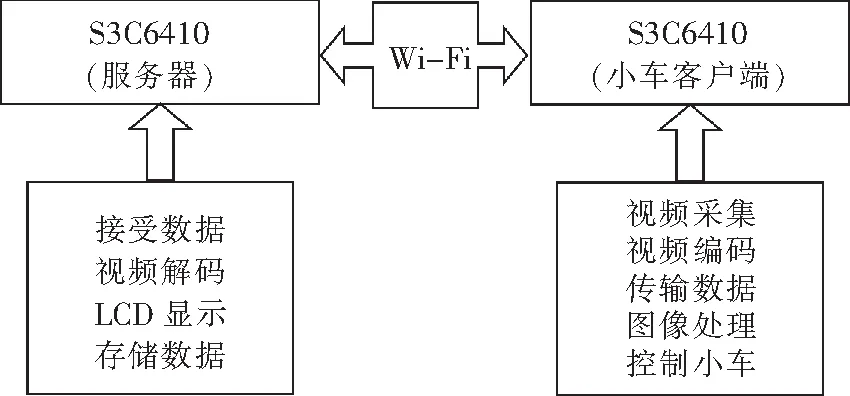
图1 系统流程图
整个系统由直流电机驱动控制、路径识别、无线传输、速度检测和报警装置组成。首先利用装载在小车上的CMOS摄像头OV9650(130W像素)对路面信息进行摄像[11]。CMOS摄像头所采集的视频信号在图像处理过程中必须先滤除附加的控制信号,然后通过AD转换进行采样,变成数据信号之后进行传输。但摄像头采集图像的数据容量比较大,若直接采用无线传输,传输速率需要达到20 Mbps左右,要想满足实时性要就,需要提供的带宽达到几百兆,但有了视频压缩技术之后,在传输之前利用视频压缩编码来处理所采样的视频信号,这样传输速率可以降到1~10 Mbps之间,再通过无线传输实时地发送到小车服务器终端,它将接收到的视频压缩信号进行解码并通过液晶显示器实时播放。其次根据CMOS摄像头对路面摄像信息,经图像处理后对小车前方路径提取信息进行识别,通过模糊自适应PID控制算法对舵机转向和速度进行控制,其中舵机开环控制由PWM信号输入,让小车按预定的轨迹平滑运动,若小车寻迹错误会自动发出报警提示[12-15]。
2 用户界面及软硬件设计
2.1 用户界面
用户界面分为小车服务器用户界面和小车客户端用户界面,如图2,图3所示。它是用功能强大的Linux Qt Creator 4.7.1进行编写。界面按钮均为虚拟按钮,可通过小车控制面板上的触摸屏的点击动作完成操作。CMOS摄像头所采集到的视频图像也是在该界面上进行显示。在优先级上,视频图像显示的优先等级要高于按钮界面显示等级。整体效果上视频打开之前能显示虚拟按钮,打开之后覆盖按钮界面显示,可通过侧面返回键返回按钮界面。

图2 小车服务器用户界面

图3 小车客户端用户界面
2.2 硬件设计
处理器采用的是ARM1176JZ内核型号的S3C6410,它内置有全性能的cache和MMU接口以及高速AMBA总线接口。AMBA片上总线是一个开放标准,已成为IP库开发和SoC构建的事实标准。它在视频图像处理方面相比较于其它处理器更加优越和快捷。
驱动控制采用SGS公司的L298N电机驱动芯片它具有过电压和过电流保护,抗干扰能力强。它可单独控制电机,当输入信号端IN1接高电平输入端IN2接低电平,电机正转。如果信号端IN1接低电平,IN2接高电平,电机反转。同时还可调电机的转速,实现PWM脉宽平滑调速。因此,它相对于其它电机驱动芯片而言对系统的稳定性有很大的提高。
电源模块。此系统的设计需要3种电压,分别是1.8 V,3.3 V和5 V.其中5 V电压利用美国国家半导体公司生产的3 A电流输出降压开关型集成高效稳压电路LM2576和开关稳压电源将220 V直接转换,再利用低压差电压调节器LM1117可以得到2个固定的3.3 V和1.8 V电压输出。它们为处理器及其外围扩展器件供电,其中S3C2410内核使用的1.8 V电压[16]。
2.3 软件设计
系统采用Linux 2.6.36v2嵌入式内核,软件应用程序开发环境在Qt Creator 4.7.1上进行。根文件系统采用yaffs/yaffs2,它是专门针对Nand Flash开发的可读可写文件系统。软件设计如图4,图5所示。

图4 服务器程序流程图

图5 小车客户端程序流程图
在无线传输过程中,Wi-Fi传输协议上选择基于连接的TCP协议。也就是说,在正式采集和接收数据前,必须和对方建立一种可靠的连接。一个TCP通信协议连接必须要经过三次“握手”才能建立起来,它的过程相当复杂,但TCP通信协议适合传输大量数据。
在路径识别模块中,舵机转向控制采用模糊自适应PID控制算法来进行优化。模糊自适应PID控制系统由一个模糊控制环节和一个PID控制器组成。PID控制器表达式为

(1)
式中 f(k)为PID控制器输出的控制量;e(k)为角度偏差信号;Km为比例 ;Kn为积分系数,它的作用使系统的稳态误差得到消除;Ks为微分系数,它的作用是使系统的动态特性得到改善。
采集数据经过图像处理后,赛道的路径基本信息就会展现出来。但要判断当前赛道是直道还是弯道。需要先确定2个点,即寻迹的有效起点和有效终点[14-15]。有效起点即图像数据最近位置的第一个有效行,黑线的中心位置,把它定义为A(X0,Y0)点;有效终点即图像数据最远位置的第一个有效行,黑线的中心位置,把它定义为B(X1,Y1)点。根据2点确定一条直线,就能确定斜率。将它设置为偏离图像中心位置的角度偏差信号。将偏差信号分为2路,一路送入PID控制器,另一路和它的变化率一起送入模糊控制环节,根据公式(1)得到参数校正值ΔKm,ΔKn,ΔKs,自动校正初始的PID参数Km,Kn,Ks,然后用校正后的参数输入PID控制器得到控制量,作为速度调节环节给定值。这样就可以降低舵机转向滞后的机率而控制舵机转向的角度。再利用舵机开环控制(给定的PWM信号值与舵机的输出转角成线性关系),很好地实现舵机的转向。这样可以保证小车在直道进入弯道之前提前转弯,实现小车按预定路线平滑寻迹。
3 测试结果及误差分析
根据反复测验,小车在直道上行驶速度不低于0.5m/s;小车在弯道转弯时,与指定路线上的偏差不超过50mm.小车在指定路线上运行状况测试表,见表1.

表1 小车在指定路线上运行状况测试表Tab.1 Car running test on the specified route
小车在弯道转弯时与指定路线上运行所造成的误差是在视频图像分析处理时通过图像亮度采用两点预定路线提取黑白线信息,从而导致路线容易跑出摄像头摄像范围,再加上视频在传输过程的延时导致小车寻迹效果更差。为了降低小车寻迹偏差,结合图像亮度提取黑白线算法时对光线要求高,在小车前端安装了一个前方照明灯,这样会消除对光强度不均匀对小车在寻迹线路上所造成的影响。其次利用图像特征处理提取技术,提出采用三点预定路线来优化图像处理算法,结合模糊自适应PID控制算法可计算出预定路线实际寻迹轨迹,摆脱了传统的光电二极管寻迹或者红外线寻迹的缺陷。这样它的道路参数多、检测范围宽、前瞻距离远的优点,使得寻迹小车的速度更加快捷和准确。
4 结 论
本系统在彩色视频图像当中提取黑白线算法优化时,需要考虑视频传输延迟的影响。为提高硬件寄存器工作效率,采用减少不必要的内核进程的运行和对驱动进行优化。经过反复测试,本系统在白底黑线的跑道上铺设一定宽度任意弧度的黑线,小车能快速地沿此黑色引导线实现自主寻迹,在弯道转弯时偏差较小,具有稳态误差小和控制响应时间短的特点,有较高的应用价值。
References
[1]端木春江.视频处理与编码中的运动估计技术[M].南京:南京大学出版社,2011.
DUANMU Chun-jiang.Video processing and encoding of motion estimation technique[M].Nanjing:Nanjing University Press,2011.
[2]郝秦霞.智能分户供暖监控系统的无线温控器设计[J].西安科技大学学报,2013,33(6):737-740.
HAO Qin-xia.Smart household heating thermostat Wireless monitoring system design[J].Journal of Xi’an University of Science and Technology,2013,33(6):737-740.
[3]来望银.视频监控系统在火灾报警中的应用[J].西安科技大学学报,2013,33(4):400-403.
LAI Wang-yin.Video surveillance system in the fire alarm[J].Journal of Xi’an University of Science and Technology,2013,33(4):400-403.
[4]马卜林.煤矿井下Wi-Fi人员定位GIS系统设计与实现[J].西安科技大学学报,2012,32(3):301-304.
MA Bo-lin.Wi-Fi coal mine personnel positioning GIS system design and implementation[J].Journal of Xi’an University of Science and Technology,2012,32(3):301-304.
[5][美]Robert Love,陈莉君,康华译.Linux内核设计与实现[M].北京:机械工业出版社,2011.
Robert Love,CHEN Li-jun,KANG Hua-ze.Linux kernel design and implementation[M].Beijing:Beijing Machinery Industry Press,2011.
[6]齐爱玲,张小艳,刘 涛.μC/OS-Ⅱ在TI DM270微处理器上的移植与开发[J].西安科技大学学报,2007,27(3):462-466.
QI Ai-ling,ZHANG Xiao-yan,LIU Tao.Implantation and development of μC/OS-Ⅱ into TI DM270MPU[J].Journal of Xi’an University of Science and Technology,2007,27(3):462-466.
[7]邱光能.基于嵌入式的远程视频监控系统的设计与实现[D].长沙:电气与信息工程学院,2013.
QIU Guang-neng.Design and implementation of remote video monitor system based on embedded technology[D].Changsha:Electronic Science and Technology,2013.
[8]黄 刚.矿井人员定位系统硬件电路应用设计[J].西安科技大学学报,2012,32(3):320-323
HUANG Gang.Mine personnel positioning system hardware circuit design applications[J].Journal of Xi’an University of Science and Technology,2012,32(3):320-323.
[9]孙 弋,袁晓霞.有限空间WIFI无线信号覆盖测量系统设计[J].西安科技大学学报,2013,33(3):347-350.
SUN Yi,YUAN Xiao-xia.Limited space Wi-Fi Wireless signal coverage measurement system design[J].Journal of Xi’an University of Science and Technology,2013,33(3):347-350.
[10]孙 弋,袁晓霞.矿井有限空间WIFI信号测评系统研究[J].西安科技大学学报,2013,33(5):544-548.
SUN Yi,YUAN Xiao-xia.Mine limited space research WIFI signal evaluation system[J].Journal of Xi’an University of Science and Technology,2013,33(5):544-548.
[11]林浩岳,董晓庆,曾 辉,等.基于CMOS摄像头识别路径的智能车控制系统设计[J].韩山师范学院学报,2009(12):52-56.
LIN Hao-yue,DONG Xiao-qing,ZENG Hui,et al.Design of intelligent vehicle control system based on CMOS camera path identification[J].Journal of Hanshan Normal University,2009(12):52-56.
[12]陈华伟,熊 慧.智能循迹小车硬件设计及路径识别算法[J].单片机与嵌入式系统应用,2010(12):26-31.
CHEN Hua-wei,XIONG Hui.Hardware design and path identification algorithm for smart track-keeping car[J].Microcontroller and Embedded System Application,2010(12):26-31.
[13]徐 斐.基于自适应模糊PID算法的舵机控制器研究[D].西安:西安电子科技大学,2008.
XU Pei.Steering gear system controller in missile based on adaptive fuzzy PID algorithm[D].Xi’an:Xi’an Electronic and Science University,2008.
[14]林 涛,马腾炜,陈亚勋,等.基于MCU 的自动寻迹智能车控制系统的设计[J].自动化与仪表,2012(11):1-4.
LIN Tao,MA Teng-wei,CHEN Ya-xun,et al.Control system of automatically tracing intelligent vehicle based on the MCU[J].Automation and Instrumentation,2012(11):1-4.
[15]唐甫世,齐明侠,张晓春,等.复杂路线下机器人的三点三轮寻迹系统[J].单片机与嵌入式系统应用,2009(8):56-58.
TANG Fu-shi,QI Ming-xia,ZHANG Xiao-chun,et al.The three round of tracing system complex route robot[J].Microcontroller and Embedded System Application,2009(8):56-58.
[16]钱江泳.一种单片机控制的电压电流转换电路[J].煤矿机电,2012(2):64-67.
QIAN Jiang-yong.A circuit of voltage signal converts to current controlled by single-chip microcomputer[J].Coal Mine Electromechanical,2012(2):64-67.
Wireless video tracing car under Linux system
WANG Zheng-jin,WU Feng-bo,LI Guo-min,ZHANG Wen-hai
(CollegeofCommunicationandInformationEngineering,Xi’anUniversityofScienceandTechnology,Xi’an710054,China)
To study how to reduce the car’s automatic tracking deviation rate on the specified routes,we use a method combined embedded operating systems with wireless video processing based on Linux.The main control unit uses 2 pieces of Forlinx’s 32-bit ARM11 series S3C6410 processors as main control unit of server and client,respectively.The path identification unit adopts the CMOS digital camera OV9650 to obtain the path information through the image processing unit.The drive control adopts SGS’s L298N chip.The results show that it’s better to realize the smooth tracing car at predetermined route through the fuzzy-PID control algorithm to control steering gear and speed.We select the TCP protocol based on transmission data of data streaming at the Wi-Fi transfer protocol.After repeated testing,the system’s performance of path recognition is good and operation is stable.
Linux system;fuzzy-PID control algorithm;wireless video;path identification
10.13800/j.cnki.xakjdxxb.2015.0118
1672-9315(2015)01-0105-05
2014-10-20责任编辑:高 佳
陕西省科技攻关项目(209K08-36)
汪正进(1981-),男,安徽庐江人,工程师,E-mail:jin7-8@163.com
A