具有自适应能力管道机器人的设计与运动分析
2015-02-13北京市中关村中学
北京市中关村中学 于 铮
具有自适应能力管道机器人的设计与运动分析
北京市中关村中学 于 铮
具有自适应能力的管道勘察机器人对于未来管道维护、清理工作有着重要的意义。秉着在不增加驱动电机的基础上尽可能节能降耗的理念,选用螺旋驱动方式并进行了优化,提高其适应能力和越障能力。本文针对具有自适应能力管道机器人的设计理念、设计方法和建模运动结果进行了探讨。
自适应;管道机器人;管道内探;机械设计
1 前言
我国拥有数量庞大的地下管道系统管网。由于这些深处地下的管道设施有的人工无法直接进行观察检修和清洁,无法直观上对其存在的腐蚀、开裂等情况进行判断,就必须依赖相关的管道机械机器人和影像勘察设备。而管道机器人由于能够具备自适应能力,能够便捷快速的进行管道内探工作,为管道维护工作提供了保障。
2 具有自适应能力管道机器人概述
具有自适应能力的管道机器人设计考虑选用螺旋驱动方式,该方式使用的电动机数量少且易于控制,电机的减少相对能量消耗少,就有更足够的时间来完成管道的内探任务。由于地下管道中有液体管道、气体管道以及半液半气管道,而采用螺旋驱动方式的自驱动管道机器人,由于在其机械轮腿的部分也安装有旋转桨叶,从而让其能够在管道内自主行走并不受到管道内部物质的限制。管道机器人通过模块化设计就为机器人性能扩展留足空间,还便于安装影像设备。如图1所示为自适应管道机器人的设计图,整个设计主要包括:移动机构部件(包括旋转输出构件:(1)前部弹性驱动臂、旋转输出构件;(2)后部弹性驱动臂、保持架、滚轮、桨叶。)、前臂驱动部件、后臂驱动部件。
旋转传输构件1主要与前臂的驱动固定,而传输2部件则与后驱动相固定。通过弹簧的作用就让所有的滚轮都直接压在管道壁上从而确保了机器人与管道壁之间运动的摩擦力。前部驱动臂和滚轮是和旋转传输构件1相连工作的,并且前部和后部的驱动部件是分别进行工作的。当前部滚轮和驱动臂遇到障碍没有办法前进时,后部的旋转传输部件2启动,通过后部的动力传输帮助前部驱动臂前进越过障碍;而后部遇到障碍,通过前部驱动就能够带动后部越过障碍。同时也为机器人的前后运动提供便利。由于轮腿上设计有桨叶部分所以在流体中行进时通过桨叶还能够确保机器人有额外的动力,增强了其适应性。

图1 自适应管道机器人的设计图
3 具有自适应管道机器人的设计
3.1 移动机构的设计
其移动部分设计,必须结合实际的工作需求进行考虑,并满足以下条件:首先采用减速传动机构来对机器人驱动电机的输出转扭矩进行降速;其次,确保管道机器人的轴向尺寸尽可能的短才确保其灵活性;再者,应该减少驱动电机的数量减少电源的消耗,使机器人能够长时间工作。由于要确保以上三个条件,所以就必须要考虑三者之间存在的制约关系,且并不互相矛盾。采用图2的方案能够有效解决以上的三个问题。
由于采用了轮系传动的方式就可有效的对驱动电机进行降速,同时确保减速比的情况下确保了较短的轴向尺寸。而后,直齿轮1和直齿轮2都是直接和驱动电机用联轴器进行连接传动,其中直齿轮2与传动轴采用固连方式。当传动轴旋转就会通过环齿轮转动带动固联的前部驱动臂旋转,而后动力就通过齿轮输出出来。动力的另一路输出路径为驱动电动机带动传动轴和太阳轮旋转,然后经由行星轮从行星架出输出来。固联在前部驱动臂上的滚轮不仅仅被弹簧压在管道壁上且与管道轴线还要形成一定的倾斜角度;而后部的驱动臂滚轮与管道轴线平行。
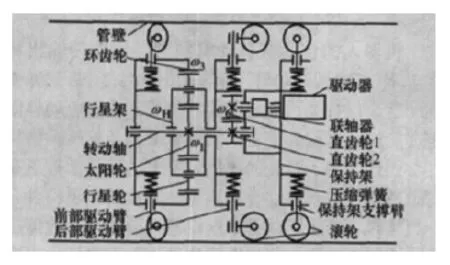
图2 自适应管道机器人移动机构示意图
3.2 工作模式设计
如上设计的机器人有两种工作模式,即正常工作模式和越障模式。在正常模式下,其在管道中向前行进由于没有障碍,所需要克服的阻力不大,仅由前部的驱动臂旋转产生设备向前行进的驱动力;此时前部驱动产生的动力足够机器人运动,后部驱动臂受到约束从而不旋转。在此时传动比能够保证机器人向前快速行进。而在越障辅助模式下,因为管道机器人遇到了相应的故障,前部驱动臂可能受到比较大的阻力无法向前,从而速度降低,电动机输出的扭矩就会增大;此时后部驱动臂就能通过克服外部驱动约束从而产生旋转输出动力,而后部输出的动力大于前部所以就能够帮助前驱动臂越过障碍,顺利向前行进。
正是由于在正常工作模式下管道机器人能够通过前驱动臂的动力快速的向前行进,而遇到障碍时又通过后驱动臂输出动力越过障碍,两种模式的交替就可确保在管道行进中机器人获得足够的自适应性,并不需要人为进行干预和控制,有良好的实用性。
3.3 后部驱动臂设计
由于在越障模式下后驱动臂的作用至关重要,且为了整个机器人在管道行进过程中具备良好的稳定性就必须要确保后臂设计满足的要求:首先,必须要确保后臂滚轮在正常工作模式下与管道轴线始终处于平行状态;其次在越障辅助模式情况下滚轮能够与轴线产生倾斜角度。
而通过研究设计,采用的后臂驱动臂结构如图3所示,主要的组成部分为:转台、滑杆、套筒、滚轮。由于滚轮是安装在转台上的就能够绕轴线进行自由的转动;滑杆与转台的连接方式为铰接,通过转台与滑杆之间的销轴就能够对两者相对的转动范围进行限制;滑杆可以在套筒中进行纵向的自由运动但是相对转动是手下了约束。套筒中安装有压缩弹簧是保证滚轮能够压在管道壁上;最后滑杆的转轴与滚轮的中心存在偏心,拉伸弹簧的预紧力保持滚轮与管道轴线平行。

图3 后部驱动臂结构图
该机器人在传动的螺旋驱动机器人的基础上进行了延伸和改进,从而能够具备更强的自适应性。并且只需要配比一个驱动电机就能够大大的减少能源消耗,保证工作的效率,有较强的工作能力。
4 自适应管道机器人运动建模结果分析
螺旋驱动的管道机器人与传统的轮式机器人在运动方式上已不同,因为螺旋驱动机器人在实验中也出现了自转现象,所以需要进行运动分析。而通过运动建模的方式对机器人的运动进行的模拟分析得到了以下的结果。
4.1 无自转现象的运动分析
通过模拟分析发现机器人的移动速度不仅仅与电机转速有关,主要还与管道的半径、轮半径、滚轮与管道轴线夹角有关。并且通过实验数据发现管道机器人滚轮与管道轴线之间夹角的正切值在实际情况下就相当于减速机构中的传动比,必须要对该夹角进行考虑。
4.2 发生自转时的运动分析
自适应机器人发生保持架自转时其移动速度与驱动臂都直接对自转现象产生影响。一般来说保持架的滚轮倾斜角为0时,机器人的运动效果是最差的,但是随着保持架滚轮倾斜角的增大其运动情况也会改善,当保持架滚轮倾斜角达到90度机器人的运动动速度达到最大值且保持架不会再进行自转。同时发现后部驱动臂的滚轮倾斜角与保持架滚轮倾斜角的影响作用相同,在后部驱动臂滚轮倾斜角达到90度时机器人的运动速度最大。正是由于这样的影响规律,所以在进行机器人滚轮倾斜角设计时尽量保证保持架滚轮倾斜角为90度的同时保证后部驱动臂滚轮倾斜角也为90度。但是越障模式下也需要对后部驱动臂滚轮倾斜角进行考虑,以保证其驱动力。
4.3 总结
传统的轮式和传统的螺旋管道机器人一般需要多电机,且适应性较差。所以采用单个电机的自适应性管道机器人无论在电机数量和工作模式上能够展现出良好的性能优势;而且由于两个工作模式的并用就能够确保机器人在管道中不需要人为干预就能够顺利行进,且有良好的稳定性。最后通过运动模型分析也说明虽然机器人会出现保持架自转,但是通过对保持架滚轮角和后部驱动臂滚轮角的选择设计能够保证自转现象得到控制。
5 结束语
具备自适应能力的管道机器人必然会在未来国家地下管道内探工作中发挥越来越重要的作用,而有关机器人设计、研究、优化的工作也不会停止。未来管道机器人在自主维修、管道清理等方面还有着巨大的发展空间,值得更多的去探索。
[1]李庆凯,唐德威,姜生元,邓宗全.管道机器人弯管运动转体原因分析[J].西安交通大学学报,2011(10).
[2]李忠健,杨宜民,梅平.基于改进的隐马尔科夫模型的人脸识别方法[J].工业控制计算机,2014(11).
[3]苑玉鹏,杨宜民,梅平.基于多传感器的礼仪机器人智能避障系统研发[J].工业控制计算机,2014(12).
[4]余跃庆,马兰,崔忠炜,李渊.并联机器人开槽薄壁柔顺关节设计与实验[J].农业机械学报,2014(05).
[5]史恩秀,陈敏敏,李俊,黄玉美.移动机器人智能搜索路径规划方法研究[J].农业机械学报,2014(06).
