GPS/IMU辅助超高分辨率航空影像加密精度分析
2015-02-07史桂波胡海驹朱紫阳
史桂波,胡海驹,朱紫阳
(1.广东省国土资源测绘院,广东 广州 510500)
GPS/IMU辅助超高分辨率航空影像加密精度分析
史桂波1,胡海驹1,朱紫阳1
(1.广东省国土资源测绘院,广东 广州 510500)

利用GPS/IMU辅助对超高分辨率航空影像进行加密,通过9种不同的加密方案,探讨了不同方案下的加密精度。结果表明,地面控制点、GPS/IMU观测值对辅助航空摄影加密均能起到一定的作用,对如何进行数据处理提出了相应的建议。
GPS/IMU;地面控制点;加密精度
随着航空摄影装备的不断更新,出现了一系列数字航摄仪,如框幅式的DMC系列、推扫式的ADS系列及国产的SWDC系列等。针对数字航摄仪成图精度分析已有大量的研究成果[1]。航摄仪在更新的同时,辅助装备也在更新,GPS/IMU辅助航空摄影是目前最常用也是效率最高的设备,已有大量的研究成果[2-4],并形成了相关的国家标准[5],且广泛应用于生产。在精度要求不是特别高的情况下,利用GPS/IMU得到的外方位元素能直接进行影像定位;而对于超高精度要求,直接定位成果能否满足精度要求,值得怀疑。为此,空中三角测量(简称“加密”)还是必不可少的[6]。为探讨超高分辨率航空影像的加密精度,笔者结合东莞市2011年航摄的影像,利用GPS/IMU辅助进行加密,通过不同的加密方案,探讨了其加密精度。
1 数据源概况
东莞市位于珠江三角洲珠江口东岸,东经113°31'~114°15',北纬22°39'~23°09'。全市陆地面积2 465 km2,海域面积150 km2。地貌以丘陵台地、冲积平原为主, 丘陵台地占44.5%;冲积平原占43.3%;山地占6.2%。东南部多山,海拔多在200~600 m, 坡度30°左右,最高峰——银瓶嘴山主峰高898.2 m;中南部为丘陵台地区;东北部陆地和河谷平原分布其中,海拔在30~80 m之间,坡度小,地势起伏和缓;西北部是三角洲平原,是地势低平、水网纵横的围田区;西南部是濒临珠江口的江河冲积平原,地势平坦而低陷。
2011-05-10采用运-12飞机,GPS/IMU辅助DMCII-140数码航摄仪进行了超高分辨率航空摄影,根据测区地形划分3个航摄分区,如图1所示。各航摄分区主要技术参数区选取了航摄分区Ⅰ中的一块区域,该区域位于虎门镇与长安镇交界处(表1)。实验区地形类别为平地,建筑物纵横交错,选点目标众多,为进行比较,共选择了4条航线、每条航线16条基线,按照区域网布点方式每隔4条基线布设一个平高控制点(P点),共25个地面控制点,另外在其中均匀布设了12个平高检查点(J点)。
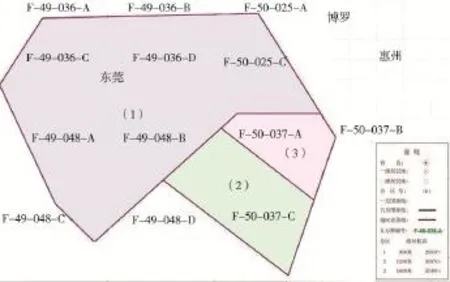
图1 航摄分区示意图
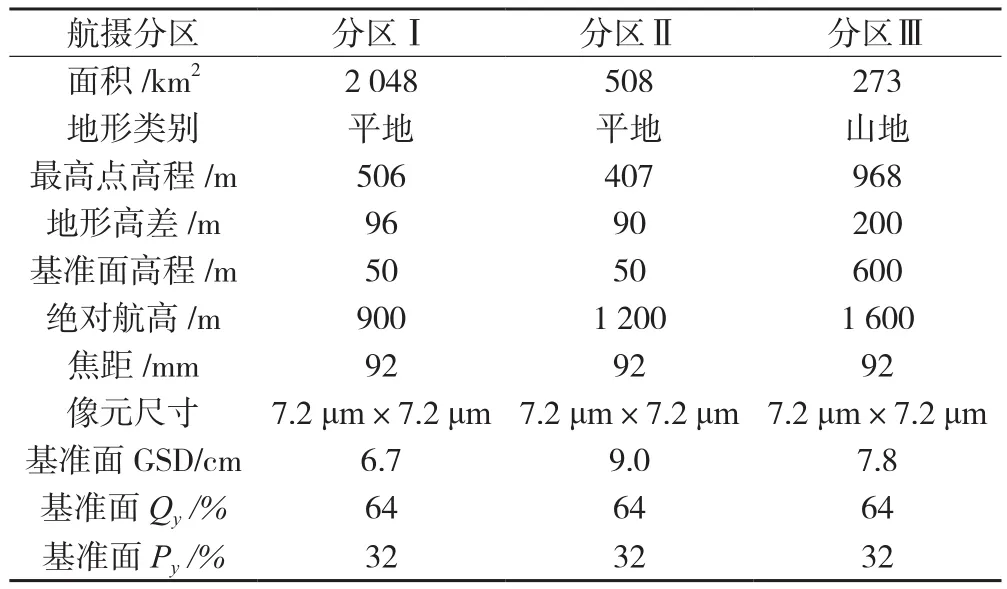
表1 各航摄分区主要技术参数
对所获取的GPS数据采用精密单点定位技术进行解算,获取曝光时刻的外方位线元素,利用GPS/IMU系统自带的数据后处理软件GPS/IMUPac进行IMU 观测值的联合数据处理,得到曝光时刻航摄仪的空间位置和姿态。利用DGCORS基准站WGS84坐标系与1980西安坐标系之间的转换关系,将航摄仪的空间位置和姿态参数转换到1980西安坐标系,再利用东莞市高精度的似大地水准面模型将航摄仪空间位置参数的大地高换算成水准高,得到航摄仪初始的空间位置。考虑测区范围比较小,坐标系之间差异对姿态角的影响成系统性,在后续的检校中大部分系统差能消除,故未按照文献[7]进行姿态角转换。同时,根据附带GPS/ IMU航空摄影规范要求[5],针对不同次安装航摄仪分别布设了4个检校场,实验区的检校场位于实验区域外,是对检校结果的一种验证,每个检校场分别选择了相邻不同飞行方向的两条航线,每条航线选择6条基线,每隔3条基线布设了一个平高控制点,共9个控制点,另外在中间布设了2个检查点,检校内符合精度线元素优于0.5 m、角元素优于0.02°,经检校场检校改正系统误差后获得影像最终外方位元素初始值。
2 实验方案
为对加密精度进行分析,采用Lacai的LPS软件进行了像点、控制点、检查点量测,并进行平差计算,剔除像点粗差,然后利用控制点与GPS/IMU数据进行联合平差计算,采用Herlmert方差–分量估计式[8]得到像点、控制点、GPS/IMU数据观测值单位权中误差,在此基础上,采用表2所示的几种方案进行加密。
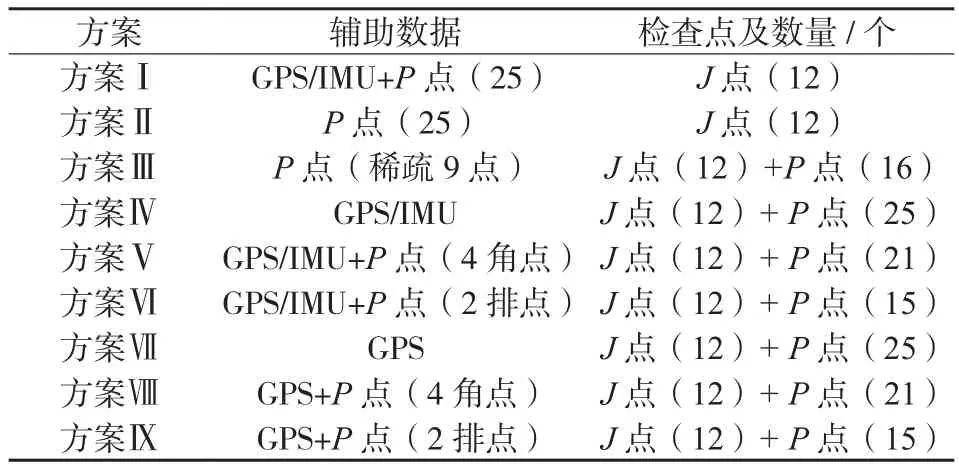
表2 不同加密方案
3 实验结果与分析
根据上述不同的方案进行区域网加密,并利用检查点的加密坐标与野外实测坐标进行比较,得到区域网加密精度,结果如表3所示。
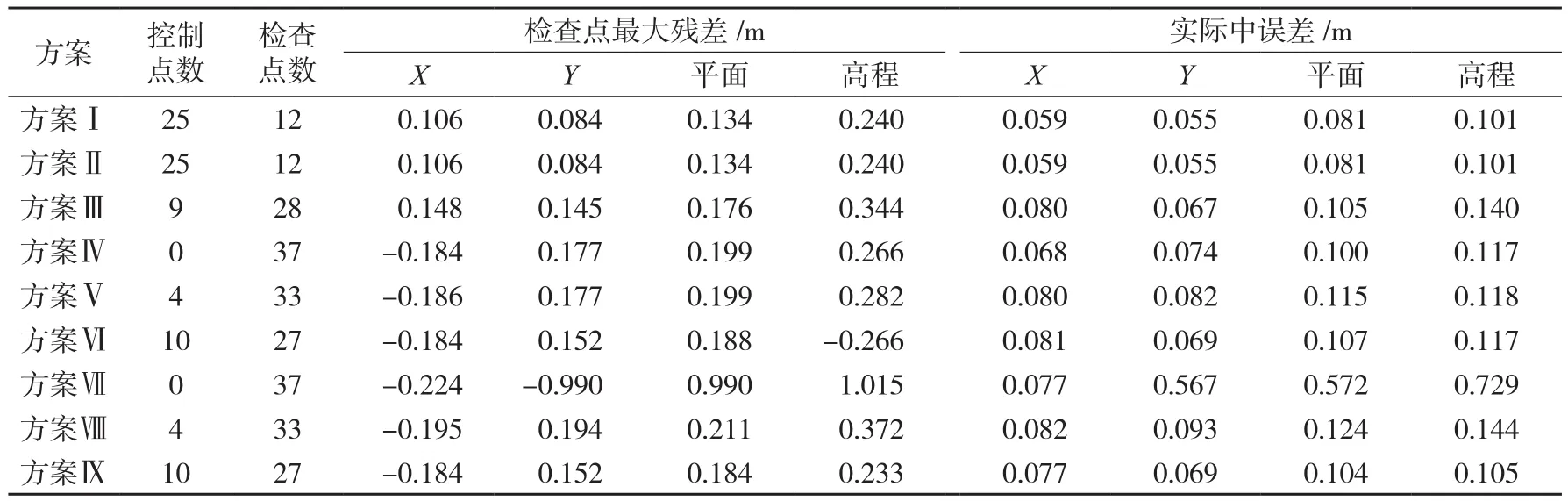
表3 不同加密方案精度统计
由表3的数据可知,除方案Ⅶ(无地面控制的GPS辅助加密)外,其余加密方案均能满足1∶500平地加密精度平面位置中误差±0.175 m、高程中误差±0.15 m的限差精度要求[9],可用于1∶500比例尺的4D产品生产,这与文献[6]的结论符合。分析表3的结果,可以得出如下结论:
1)采用方案Ⅰ~Ⅴ、Ⅶ~Ⅸ均能得到满足1∶ 500比例尺的4D产品生产的加密成果,其中方案Ⅲ、Ⅷ高程精度略低,中误差接近限差(0.15 m)要求[10],并且均有1个点超过2倍限差要求,粗差比例分别为3.6%与3.0%,超过1倍限差的也分别为7、8个点,比例分别为25.0%与24.2%,虽能满足精度要求,但是接近精度要求极限值,为非理想的方案,对于高程精度要求比较高的成图不推荐使用。
2)表3的结果表明,采用高精度GPS/IMU设备及建立检校场检校,获得的影像外方位元素精度相当高,几乎接近真值。为比较起见,将方案Ⅱ获取的影像外方位元素作为真值,对比初始GPS/IMU值与真值之间的较差,结果如表4所示。

表4 GPS/IMU初始精度
3)方案Ⅳ、Ⅴ、Ⅵ、Ⅰ为利用GPS/IMU数据辅助,适当添加控制点进行加密,结果表明,随着控制点的逐步增加,精度变化很小。由此可知,当初始GPS/ IMU精度较高时,增加控制点对精度提高相当有限,因而在实际生产中,为消除可能存在的未能完全检校的系统误差,采用方案Ⅴ即可。
4)由方案Ⅱ、Ⅴ、Ⅸ的结果可知,区域布点、GPS加两排控制点、GPS/IMU加四角控制点加密精度基本相当,均为理想的作业方案,所需外业逐步减少,特别是大区域网加密,GPS/IMU的效率优势相当明显。加密精度前者略高于后两者,但也不是很明显,因此从经济和效率考虑应优先选择带GPS/IMU或GPS辅助的航空摄影。
4 结 语
GPS/IMU辅助超高分辨率航空摄影与以往的辅助航空摄影一样能满足1∶500比例尺的4D产品精度要求。在进行航空摄影测绘时,尽可能带GPS/IMU或者GPS辅助,这样能大量减少地面控制点数量;在进行生产时,检校场的建立是必需的,高精度的检校结果能大量减少后续控制点,提高成图精度。
[1] Passini R, Jacobsen K. Accuracy Analysis of Large Size Digital Aerial Cameras[A].The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences[C].Beijing: ISPRS, 2008:507-514
[2] 李学友. IMU/DGPS辅助航空摄影测量原理、方法及实践[D].郑州:信息工程大学,2005
[3] 蔡文惠,梁国华. IMU/DGPS辅助航空摄影测量应用探讨[J].测绘通报,2009(4):41-43
[4] 袁修孝. POS辅助光束法区域网平差[J]. 测绘学报,2008,37(3):342-348
[5] GB/T 27919-2011. IMU/GPS辅助航空摄影技术规范[S].
[6] 袁修孝. 当代航空摄影测量加密的几种方法[J]. 武汉大学学报:信息科学版,2007,32(11):1 001-1 006
[7] 袁修孝,张雪萍,付建红. 高斯–克吕格投影坐标系下POS角元素的转换方法[J]. 测绘学报,2011,40(3):338-344
[8] 李德仁,袁修孝. 误差处理与可靠性理论[M]. 武汉:武汉大学出版社,2002
[9] GB/T 23236-2009. 数字航空摄影测量 空中三角测量规范[S].
[10] GB/T 7930-2008. 1∶500 、1∶1 000、1∶2 000地形图航空摄影测量内业规范[S].
P231.5
B
1672-4623(2015)05-0082-02
10.3969/j.issn.1672-4623.2015.05.027
史桂波,工程师,主要从事测绘质量管理工作。
2015-03-03。
