四旋翼飞行器设计方案
2015-02-07北方民族大学叶丽荣
北方民族大学 郭 萧 祝 玲 郭 青 叶丽荣
四旋翼飞行器设计方案
北方民族大学 郭 萧 祝 玲 郭 青 叶丽荣
四旋翼飞行器如今已为众人所熟知,四旋翼的应用也比较广泛,本文重点讲解一下四旋翼飞行器的具体设计方案,本设计使用到主控芯片Cotex-M4 K60,无线通讯模块ZigBee,角度传感器,电机驱动模块,以及电源管理模块,无刷电机等组成,具体实现过程为主控芯片通过互补算法,卡尔曼滤波算法等实现角度计算和通过PID、模糊算法等控制计算电机控制输出,同时实时获取地面站指令,完成相应动作。
四旋翼飞行器;无线通讯;互补算法;PID
引言
随着四旋翼飞行器的迅速发展,四旋翼飞行器在日常生活中的使用越来越频繁,抗险救灾,农药喷洒,岗位执勤等方面愈发凸显四旋翼飞行器的使用价值。本文目的在于提出一种四旋翼飞行器的设计方案。

图1 总体设计方案
1 总体设计方案
本设计中使用Cotex-M4 K60作为主控制器,该控制器主要应用于汽车行业,经过多年的测试和使用其稳定性已不言而喻,flash容量高达512KB,富有丰富的内部资源,性能可靠,抗干扰能力强,高达200MHz的钟频率,是多任务控制器的不二之选。该控制器其主要任务是实时接收地面站命令,同时实时计算飞行器当前的角度,并实时调整当前电机的转速,以达到四旋翼飞行器的稳定。无线部分由主从ZigBee无线模块组成,主ZigBee主要完成地面站命令发送,以及应答信号接收,从ZigBee安装到四旋翼飞行器上,其主要任务是检测获取主机命令然后发送给四旋翼飞行器主控芯片Cotex-M4 K60,主控芯片收到命令之后,做出应答,同时根据当前的状态完成相应的动作。总体设计方案框图如图1所示。

图2 系统电源
2 硬件系统设计(部分图)
2.1 电源模块
由于芯片、LCD屏供电需要3.3V,角度等传感器需要5V电源,故硬件电路设计时做了两路电源。传感器使用的电源要求纹波要尽可能地少,本方案中采用了效率较低但纹波较小的芯片LM2940(效率仅有40%左右),而没有采用效率较高纹波较大的开关电源(效率高达90%),图2为系统电源部分。
2.2 电机输出模块
如图3所示为系统缓冲门,目的是放置驱动在测试过程中损坏,回流电流过大损坏主控芯片添加的隔离缓冲门电路。
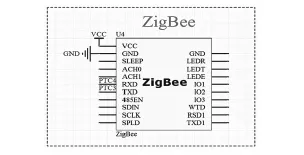
图3 驱动缓冲门
2.3 无线传输模块
如图4所示为ZigBee无线传输模块,该模块载波在2.4GHz频段,稳定性高,传输距离远,数据传输速率可调。

图4 ZigBee无线传输模块
2.4 LCD屏显模块
LCD屏显模块主要是用来下位机数据调试使用,便于脱机调试时实时观察飞行器内部参数,最终成品不含有该模块。
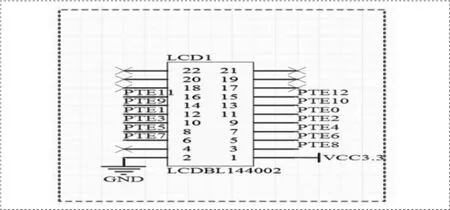
图5 LCD屏显模块
3 软件系统设计
如图6为系统软件控制流程图,系统初始化完成以后,在不同的1ms时间片中断里分别执行相应的任务,第一个毫秒内做任务一,其内容为获取当前飞行器的三轴角度、角速度数字量或者模拟量。然后在第二个毫秒内根据三轴角度值、角速度值进行角度合成和角度矫正。第三个毫秒内主要使计算四个电机的实际输出转速。第四个毫秒内完成飞行器的高度、航向获取,为悬停做准备。第五个毫秒主要进行系统安全检测,当检测到异常信号是,系统会在主任务里完成迫降任务。如此循环下去,直至关机系统停止运行。

图6 系统软件控制流程图
4 结语
该方案设计的四旋翼飞行器已经过测试,达到预期效果,在设计过程中应当注意到的是系统安全及其稳定性的要求,因为四旋翼飞行器的稳定性直接影响人身、财产安全问题。设计和调试系统的时候务必要做好防范措施以及紧急情况处理程序,在初步确认系统成熟以后,出于多方面考虑有一定的必要设计一下双系统控制,以便使系统更加稳定,使其鲁棒性更强。
[1]邹伯敏.自动控制理论(第三版)[M].北京:机械工业出版社,2007.06.
[2]智能车竞赛秘书处.电磁组直立行车参考设计方案(版本 2.0)[Z].2012.03.
Four rotor design
GuoXiao ZhuLing GuoQing YeLirong
(Beifang University of Nationalities, Ningxia Yinchuan City,750021,China)
Constitute a quadrotor has now for all known, the use of four rotor is also widely used, this paper explain the key to the specific design of the four rotor aircraft. The design used to main control chip Cotex-M4 K60, ZigBee wireless communication module, angle sensor, motor drive module and power management module, no brush motor etc., the specific implementation process as the main control chip through the complementary algorithm, Kalman filter algorithm realize the angle calculation and the PID or fuzzy control algorithm in the calculation of the motor output control, and real-time access to the ground station to make, appropriate action.
Four rotor aircraft;wireless communication;complementary algorithm;PID
郭萧(1993-),男,大学本科,单片机开发与应用工程师,研究方向:单片机。
祝玲(1978-),女,讲师,研究方向:微电子。
郭青(1992-),男,大学本科,机械工程师,研究方向:机械工程。
叶丽荣(1993-),女,大学本科,研究方向:单片机。
