基于模糊PID的温室温度控制器设计
2015-02-07山东科技大学电气与自动化工程学院李雪莲郑丰隆
山东科技大学电气与自动化工程学院 李雪莲 郑丰隆
基于模糊PID的温室温度控制器设计
山东科技大学电气与自动化工程学院 李雪莲 郑丰隆
本文设计了一种基于模糊PID的温室温度控制器来解决具有大时滞、非线性、时变性特点的温室的温度控制问题。本文设计的模糊PID控制器,通过模糊规则不断整定PID参数来取得最优控制策略,使PID参数具有自适应性。在Matlab/Simulink中建立了仿真模型,通过仿真分析发现:模糊PID控制比传统的PID控制具有动态响应快,超调量小,控制效果平稳的优点。
温室;温度控制;模糊PID;仿真
1 引言
植物的发芽与温度息息相关,对于温室来说,最重要的一个关键因素是温度控制。一天内的不同时刻,不同季节空气温度有所变化,不符合植物发芽的条件,因此应该根据具体情况采用恰当措施对温度进行控制。
传统的方法是在温室内放置数根温度计,通过人工的读取数值来获悉温度,然后采取一定的措施来获得合适的温度。这种方法极其的不方便,重要的是人工不可能实时观测温室温度并及时的采取相应的措施来调控温度。温度控制不及时植物的发芽生长可能受到很大影响。一般温室温度控制系统采用的多为常规PID控制器。常规PID的三个控制参数通常按照控制性能要求通过经验凑试得来。温室温度控制所面临的是一个时变的、带滞后的、复杂的控制对象,常规PID无法及时调节参数来进行控制。模糊控制不需要建立精确的数学模型,基于丰富的操作经验建立的模糊规则作为控制策略,适用于解决非线性系统的问题[1]。
2 模糊PID控制器的设计
本文采用模糊控制与PID控制的结合,根据偏差和偏差变化率,由建立好的模糊规则调整PID参数,实质即为参数自适应控制算法。相较于与传统控制方法,模糊控制利用人类专家控制经验,对于非线性、复杂对象的控制显示了鲁棒性好、控制性能高的优点[2]。
2.1 系统结构及原理
参数自适应模糊PID控制器的系统结构主要由参数可调PID和模糊控制系统两部分构成,其结构如图1所示。
模糊PID控制器的控制原理:系统误差e和误差变化率ec作为输入,通过模糊推理方法对PID参数kp、ki、kd进行在线整定,以满足在不同的误差e和误差变化率ec的情况下对控制器参数的不同要求,而使被控对象具有良好的动态、静态性能[3]。

图1 控制器结构
2.2 PID控制器参数自整定原则
PID参数的整定必须考虑在不同时刻3个参数的作用及相互之间的互相联系。
根据参数kp、ki、kd对控制系统的控制作用,通过前人累积的大量工程经验,可以得到以下三点参数自整定原则:
(1)当偏差较大时,不管偏差变化趋势如何,都应该以减小偏差为主,加快系统的响应速度。为此选择较大的kp和较小的kd。另外为了防止系统出现较大的超调、积分饱和,ki值要小,通常取ki=0。
(2)当偏差向着增大的趋势发展时,若此时偏差较大,应该对系统施加较强的控制作用,使偏差绝对值迅速减小,此时应该选取较大的kp、ki要小,kd适中;若此时偏差较小,则对系统施加一般的控制作用来使偏差向着减小的发展趋势即可。
(3)当偏差向着减小的趋势发展时,此时系统是趋于稳定的,对控制参数进行适当的微调即可[3]。
2.3 各变量隶属度函数的确定
根据控制性能要求,将误差e和误差变化率ec作为输入,PID控制器的三个参数kp、ki、kd的修正△kp、△ki、△kd作为输出。取误差e和误差变化率ec及输出△kp、△ki、△kd模糊子集为{NB,NM,NS,ZO,PS,PM,PB},子集中元素分别代表负大,负中,负小,零,正小,正中,正大。误差e和误差变化率ec的论域为[-6,6],量化等级为{-6,-4,-2,0,2,4,6}[4]。
根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计分数阶PID参数的模糊矩阵表,算出参数代入下列公式计算:

图3 模糊PID控制系统仿真框图

式中:0kp0、ki0、kd0为常规PID的控制参数。△kp、△ki、△kd为模糊控制器的3个输出,
可以根据系统的输入误差和误差变化率进行自适应调整。[5][6]。
在模糊逻辑工具箱的隶属度函数编辑器中,将输入量e,ec,输出△kp、△ki、△kd的隶属函数都选定为三角形(trimf),如图2所示。

图2 输入量e,ec,输出△kp、△ki、△kd的隶属函数

表1 △kp的模糊控制规则表
2.4 建立模糊规则表
根据经验专家的大量工程经验,根据误差和误差变化率来设计减少系统输出误差的模糊控制规则。模糊控制的核心是模糊推理,它利用事先设计好的模糊规则对控制参数进行不停地计算整定,最终得出最优控制量。本文总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表。根据以上所述的PID参数调整原则,建立了针对kp、ki、kd3个参数分别整定的模糊控制表如表1、表2和表3所示[7]。

表2 △ki的模糊控制规则表
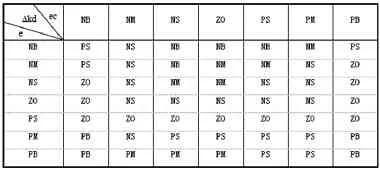
表3 △kd的模糊控制规则表
合并三表可以得出49条模糊控制规则。
3 实验分析
本文的被控对象为温室的温度,范围为0~20摄氏度,假设初始温度为0摄氏度,对它进行控制,使温度稳定在14摄氏度,调节时间尽可能的短。一般可用一阶惯性滞后环节来描述温控对象的数学模型[8]。假设温度控制模型的传递函数为:
