基于matlab的交通标志检测技术研究
2015-02-07吉首大学信息科学与工程学院林巧玉钟宜轩
吉首大学信息科学与工程学院 林巧玉 林 哲 谢 强 杨 圣 钟宜轩
基于matlab的交通标志检测技术研究
吉首大学信息科学与工程学院 林巧玉 林 哲 谢 强 杨 圣 钟宜轩
交通标志检测技术的研究,对于现代智能交通的发展具有重大意义。文中提出一种基于颜色检测的算法,首先,将原彩色图像转化为灰度图像,同时,利用RGB颜色模型中的阈值分割将原图像转化为二值图像,然后通过Canny算子实现边缘检测,再对边缘检测结果进行封闭区域填充处理并再次进行边缘检测,从而得到目标区域的坐标范围,进而实现图像中交通标志部分的准确定位,最后通过图像之间的算术运算去除背景,完成交通标志的检测。实验结果表明,该算法可以快速准确地检测出图像中的交通标志,准确率达到93.75%,具有速度快,准确度好,易于理解和实现等优点。
交通标志检测;RGB颜色模型;阈值分割;Canny算子
1 引言
对于交通标志来说,颜色是其检测的最显著的特征之一。对交通标志通常会采用颜色进行初步检测,因为交通标志的背景颜色主要包括红色、蓝色和黄色。其中红色边缘表示的是禁止标志,黑色边缘加黄色内部表示的是警告标志,蓝色底面上添加白色图案的表示的是指示标志。
在融合交通标志图像的颜色特征以及形状特征的基础上,本文实现了交通标志图像的快速检测。算法流程如图1所示,对于交通标志的形状的检测首先通过Canny算子进行边缘分割,对边缘检测结果进行封闭区域填充,二次边缘检测后可得到目标区域的坐标范围,从而定位出目标区域,最后去除背景完成交通标志的检测。
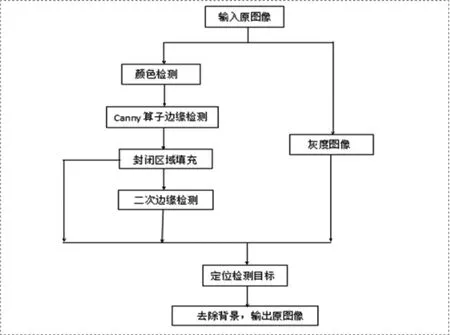
图1 算法流程图
2 颜色检测
RGB颜色空间是图像处理领域中最常用的颜色检测彩色空间。通过红、绿和蓝三个颜色通道的变化和相互叠加得到各种颜色。当三基色都为最小值时,总体表现颜色为黑色,当三基色都为最大值时,总体表现颜色为白色。RGB颜色空间是最基础的颜色空间之一,它也是由相机采集到的图像中最原始的色彩空间,如果交通标志检测的实时性要求比较高,RGB空间是最好的选择,因为它不需要任何的变化就可以直接对图像进行处理。
基于颜色的阈值分割方法中,阈值的选取是最关键的一步,用于交通标志颜色分割的阈值要根据交通标志的设计颜色来选取。在RGB空间中,交通标志分割方法采用红、蓝、绿三通道的差值进行区域分割。虽然各个通道易受光照影响,但是三通道的差值却具有较强的独立性。通过这种方法中,参照文献[1]中的基于差值的阈值分割模型,并将其中的[0,1]范围内的像素值取值范围扩充至[0,255],多次实验后得到修正的分割阈值,根据三通道的分量差提取相应的红、黄、蓝区域,得到阈值分割公式如公式(1)所示。

对原图像进行颜色检测以及转换为灰度图像后所得的图像如图2所示,在接下来的边缘检测之前,对颜色检测结果中连通区域小于25*25的面积块进行去除,以达到去噪目的。

图2 图像的初步处理
3 边缘检测
边缘检测算子常用的有Canny算子、Roberts算子、Prewitt算子、Sobel算子等。Roberts算子定位比较精确,但由于不包括平滑过程,对噪声比较敏感;Prewitt算子是平均滤波,Sobel算子是加权平均滤波,两者对灰度渐变低噪声的图像检测效果较好,但对于混合多复杂噪声图像处理效果并不理想。综合考虑,本文采取Canny算子进行边缘检测,Canny算子具有滤波、增强效果的特性,无论从视觉效果还是客观评价来看,提取的边缘线性连接程度也很好,对线类边缘的提取比较完整,而且更加细腻。
3.1 Canny算子边缘检测原理
对于图像的边缘检测需要满足两个条件:一是能够有效地抑制噪声;二是尽量精准的确定边缘的位置。Canny算子边缘检测过程如下:
第一步:去除噪声。通常的边缘检测算法对噪声都非常敏感,所以去除噪声很有必要。将原图像与高斯平滑模板作卷积来平滑图像,得到的图像与原图像相比会有些轻微的模糊。高斯函数平滑函数如公式(2)所示:

第二步:计算图像梯度的幅度和方向。图像中的边缘可能会指向不同的方向,所以Canny算子使用2个掩模分别检测水平、垂直方向的边缘,两个方向上的掩模模板如图3所示。

图3 方向掩模模板
其梯度幅值及方向的表达式分别如公式(3)、(4)所示:

当我们知道了梯度方向后,可以以45度角划分边缘方向为8个方向,得到如图4所示的边缘梯度方向示意图。

图4 边缘梯度方向示意图
3.2 目标区域的检测
首先对完成颜色检测的图像进行第一次Canny边缘检测,检测结果如图5(a)所示,然后对边缘检测结果进行孔洞填充,如图5(b)所示,再对填充图像进行二次Canny边缘检测,得到待检测标志的外边缘,结果如图5(c)所示。

图5 Canny算子边缘检测结果图示
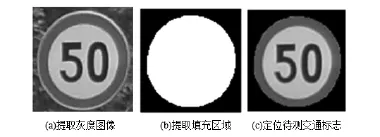
图6 交通标志部分初步提取
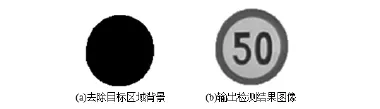
图7 最终检测结果图示
为得到更好的检测结果图示,我们结果6(c)进行去除背景的处理。首先,对图6(b)取反得到图7(a),将图6(c)与图7(a)相加得到最终输出的检测图像,如图7(b)所示。
4 实验结果及分析
实验在Inter Pentium5的处理器,CPU2.4GHz和内存为4GB的条件下进行,利用Matlab7.0编程仿真实现对交通标志的检测。实验中对80个交通标志进行检测,正确检测到的标志的数目为75个,正确率达到93.75%。
通过实验发现,在颜色的检测过程中,对于黑色边缘黄色内部表示的警告标志,以及蓝色底面白色图案的指示标志的检测可以达到较好效果,尤其是蓝底白案的指示标志,由于其只有两种颜色,检测既准确又快速,如图8所示;而红色边缘表示的禁止标志,尤其有些交通标志内部是黑色的指示图案,可能在RGB模型将图像转换为二值图像后造成较大干扰,这时再利用Canny算子边缘检测可以准确检测出交通标志图像,如图9所示。
实验结果表明,采用本文的算法对交通标志图像进行检测,该检测算法可以准确快速地识别出交通标志图像,满足准确性、实时性要求,并能达到较好的效果。部分检测结果图如图8——图10所示,图中(a)表示原彩色图像、(b)表示颜色检测后得到的二值图像、(c)表示Canny算子边缘检测后图像、(d)表示图像中提取的目标区域、(e)表示最后的输出检测结果图像。

图8 指示标志检测结果

图9 禁止检测结果
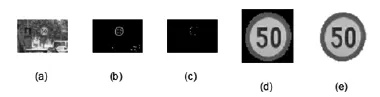
图10 限速标志检测结果
5 总结
随着物联网的发展,智能交通这一概念也相应被提出,交通标志的有效检测是智能交通发展的必然要求。本文通过分析图像的颜色信息,完成了对交通标志的检测,针对不同的图像,用Matlab软件进行了检测,且效果较好。通过实验也可以发现,基于颜色的检测,也存在着一些不足之处。由于我们所实现的检测均是用相机所拍摄的静止的图像,若输入的为动态的图像,则有运动模糊、阴影或高光等的因素都需要被考虑,在今后的研究中还应对这些方面进行更深入研究。
[1]张潘潘.道路交通标志检测与识别算法的研究[D].山东大学,2012.
[2]张伟,何金国.Hu不变矩的构造与推广[J].计算机应用,2010,09:2449-2452.
[3]周广波.基于颜色和形状特征的交通标志检测[D].大连理工大学,2013.
[4]黄志勇,孙光民,李芳.基于RGB视觉模型的交通标志分割[J].微电子学与计算机,2004,10:147-148+152.
[5]张瑞,张朋.基于颜色和形状的交通标志检测与分类[J].微计算机信息,2010,35:226-228.
[6]陈宏希.基于边缘保持平滑滤波的Canny算子边缘检测[J].兰州交通大学学报,2006,01:86-90.
[7]王贵彬.基于Canny算子与形态学融合的边缘检测算法[D].哈尔滨理工大学,2014.
宋海龙。
吉首大学2014年大学生研究性学习与创新性实验计划项目。
