室内外一体化行人导航地图制作与表达
2015-02-06赵建娇
赵建娇
(1.河北工程大学,河北 邯郸 056000)
室内外一体化行人导航地图制作与表达
赵建娇1
(1.河北工程大学,河北 邯郸 056000)

面向室内外一体化行人导航应用,针对室内外导航数据的不同特点和相互关系,提出一种行人导航地图数据模型。从数据采集与处理、数据组织、数据管理以及数据发布等几个方面研究探讨地图制作与表达方法。
行人导航;室内外一体化;导航地图
随着移动互联网技术的迅猛发展和室内定位技术的日趋成熟,人们对于导航应用的需求已经从原有的室外导航拓展为室内外一体化的导航。目前导航数据主要是面向室外车行导航建立的[1],室内外一体化的行人导航研究还处在起步阶段,包括地图制作与表达在内的各方面技术亟待完善。
从导航应用的角度看,室内导航地图数据与室外导航地图数据存在一定差异。室外导航地图内容主要突出道路信息,而对于室内空间信息来说,室内各层及层内数据间的拓扑关系比二维坐标更为重要。室内导航地图内容以POI(point of interesting)及空间关系为主,甚至不显示道路信息[2]。针对室内外地图数据的不同特点,本文从行人导航数据采集与处理、数据组织与管理和数据发布等几个方面说明室内外一体化导航地图的制作与表达方法。
1 行人导航地图数据模型
本文从室内外一体化导航应用角度出发,提出行人导航地图数据模型。模型的设计主要考虑地图内容、数据组织和要素关系,同时能够支持路径规划、地图显示、路线引导及兴趣点查询。
从GIS视角描述室内3D空间,较为成熟的数据模型为CityGML 中的LOD4-室内模型,现已成为数据标准,但其主要目的更注重于数据展示和可视化,而不是室内空间服务和分析[3]。室内外一体化模型构建,主要是在既有室内外导航数据模型基础上,充分考虑室内、室外数据间的关系和数据使用特点,扩展现有导航数据模型,实现室内外数据无缝管理。在一体化数据模型构建过程中,主要考虑室内外POI数据、室内外路网LINK的整合。其中,POI数据通过建立POI父子关系实现室内外POI数据模型的整合;路网LINK以建筑物室内外间的主要出入口为节点,将室内外路网无缝连接,如图1所示。
2 行人导航地图制作与表达
2.1 室内外数据的采集与处理
相对于车行导航地图来说,行人导航地图对于数据精度要求更高,要实现良好的导航效果,地图数据应达到1 m以内的平面精度要求。由于客观环境和基础数据资料的不同,室内外数据的采集与处理分别采用不同的方法,基本流程如图2所示。
室外行人导航地图数据的采集可以充分利用现有资源,包括车行电子导航地图、高分辨率遥感影像和大比例尺地形图,辅之补充采集行人导航更为关注的信息,包括人行道路(天桥、地下通道、步行街等)、公交站点、门牌信息、POI等。数据处理上,利用大比例尺地形图对高分辨率遥感影像进行几何纠正,制作正射影像作为数据底图,保证数据精度。再利用正射影像对现有电子导航地图进行精纠正,最后进行数据补充采集,形成室外导航地图数据。
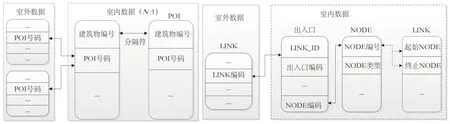
图 1 室内外一体化数据模型

图 2 室内外数据采集与处理流程
由于现有资料来源复杂、数据格式多种多样、数据精度无法保证,室内导航地图数据采集需要根据所收集的资料内容、精度差异,选取不同的室内地图制作方法。
对于已有CAD 设计施工图且内容详尽、精度符合要求的区域,可根据提供的CAD图直接进行室内地图制作和验证。以CAD图作为工作底图进行现场调绘,将POI、空间单元、出入口和道路等地图内容标示在工作底图上,生成调绘地图。利用制图工具软件,将调绘地图内容数字化并进行拓扑、属性修改等数据处理,编辑成符合数据模型要求的室内电子地图数据。
对于没有CAD图或者数据不完整的区域,则采用现场测绘的方法进行室内地图数据采集与制作。利用全站仪测量,测量结果存入数据终端,然后将数据终端接到计算机,读入数据并进行数据处理,制作室内导航电子地图。地图内容包括POI、路网等要素,其几何类型包括点、线、面,一个要素在导航地图展现时可能包含多种几何类型。
整体构建完毕以后可以直接到现场进行数据验证。线、面状要素的数字化采集密度以面状要素几何形状不失真为原则,采点密度随着曲率的增大而增加,曲线不得有明显的变形和折线。线状要素(如停车场的人行道,车道)要记录方向,为内业进行路径分析作准备。点状要素采集该要素符号化后的定位点,如标识牌等。属性信息为导航需求或公众位置服务需求的信息,记录属性信息尽可能全面。应特别注意处理好各要素间的关系,各层叠加后关系应协调一致。
2.2 行人导航基础地图数据的组织
在实际应用中,行人导航所用到的全部基础地图数据都存储在中心服务器上,移动终端仅显示与行人导航必需的底层数据,当行人进入立体交通环境后,会从服务器传送所需的三维立体场景数据,将定制化的数据通过服务端进行统一管理,终端仅发送数据调用请求。
本文通过建立面向数据分区的多层数据组织方式,从而达到多种类、高效率的新型行人导航服务。进行数据分区有利于建立快速索引、数据传输和移动终端的数据显示。对于行人导航应用而言,终端屏幕的最大显示范围一般以用户当前位置为起始点,目的地为终点。从数据传输量和更好的用户界面角度综合考虑,传输数据大小可设置为屏幕大小的9倍,满足放大/缩小/平移操作的需求,如图3所示。同时,要构建多层数据集。

图 3 基础地图数据的组织
构建多层数据集主要依据以下规则: 具有相同或类似特点属性信息的数据可放在同一层;对于同类数据,只要一个属性项不同,则应考虑存储在不同层上;具有不同安全级别的数据应存储在不同层上; 不同数据源的数据应存放在不同层上; 进行数据分层时,要考虑到数据、数据应用、数据更新和维护的简便性、比例尺连续性等之间的关系,同时为了满足应用需求,各层数据量应基本保持平衡; 尽量减少数据冗余。
2.3 行人导航基础地图数据的管理
目前有多种面向导航的不同数据模型,主要有ISO-GDF4.0、日本KIWI-W协会的KIWI和NavTech公司的SDAL(shared data access library)。这3种模型均没有考虑人行道、自行车道、移动要素和实时信息[4-7]。本文在传统规则网格划分的基础上,提出基于不规则多边形的网格划分模型,从而达到加快数据调度速度,提高数据访问效率的目标。
为使形状数据、拓扑数据、属性数据、管理数据和元数据表示的时间空间数据适用于行人导航系统,本文建立自有的数据逻辑结构模型,将基于动态数据的行人导航基础地图数据按不同层次分别进行管理,在相邻数据层次间,上层数据由下层的全部数据或部分数据构成。最底层的详细行人导航数据中存放全部数据信息。
数据结构模型采用格网管理。本数据结构模型把整个地图区域以格网为单位进行分区管理。格网的管理采用层、块、格网的三级线性树状逻辑结构。这种树结构的线性分层分区管理方式,能够大大加快数据信息的检索速度。
为提高行人导航基础地图数据的调用速度,本数据结构模型创建了数据的网络数据。与一般网格划分不同,不采用规则网格划分,而是在数据规划过程中,以调用固定数据量为单位,尽可能使用大范围数据,按任意多边形定义存放区域,存放区域根据其外接长方形进行管理。在大范围内对这些长方形再进行分层管理,如图4所示。

图 4 基于不规则多边形的网格数据管理示意图
2.4 数据发布
服务端API主要包括信息搜索、路径规划、定位等地图服务。这些服务提供给客户端使用,所有访问均通过API services 交互实现。其中,信息搜索服务提供POI、空间单元、功能分区等属性或空间信息搜索。支持关键字查询和关键字查询结果的分类筛选。信息搜索服务包括两种:①在指定建筑物内按条件检索;② 按指定条件在室内地图数据库全库检索。搜索条件可以设定为空间或者属性限制。路径规划服务提供多种路径计算原则的点到点的路径查找与引导。路径搜索可按照人行、车行划分,人行也可按照行进方式(步梯、直梯、扶梯等方式)建立搜索规则。导航路径规划结果将以坐标串形式返回。定位服务提供预留接口,提供WIFI、多传感器融合与MapMatching综合定位服务。
客户端开发主要是调用服务端的API,进行地图的基本操作。操作包括:地图的放大/缩小,切换楼层,拖动,设置地图中心,画点/线/面,显示比例尺,Routing,POI查询等操作。
3 实 例
本文以北京市东直门交通枢纽为例进行数据制作试验。在北京市东直门交通枢纽1 km范围内,进行室内外数据采集与处理。室外部分遥感信息源选用0.5 m分辨率的卫星影像,该影像可以满足东直门地区1 km2行人导航数据的制作需要。利用1∶2 000地形图数据对0.5 m分辨率影像进行有效纠正,遥感影像理论纠正精度可达0.5 m测图精度要求。该纠正精度满足1 m以内的平面精度要求。
为检测其纠正精度,保证行人导航数据精度要求,对该纠正范围内1 km2影像选取检查点12处,利用北京市CORS系统对检查点进行量测。测得该影像的平面平均中误差X为0.121 8 m,Y为0.174 6 m。得到正射影像后,利用正射影像将现有电子导航地图进行精纠正,最终完成正射影像与导航数据的叠加,形成室外导航地图数据,如图5所示。
室内部分首先在东直门交通枢纽搜集了CAD图纸和平面示意图,根据提供的CAD图直接进行室内地图制作和验证。以CAD图为基础进行外业调查,补充修订POI、空间单元、出入口和道路等内容。通过GPS及室内测量进行室内地图数据精度检查,测得室外检查点的平面最大误差X为0.273 2 m,Y为0.633 9 m,平均误差X为0.144 18 m,Y为0.340 5 m,室内层间对应点的平面平均误差,X为0.050 2 m,Y为0.023 1 m。数据发布效果如图6所示。

图 5 室外导航地图

图 6 数据发布效果图
[1] Li Y,He Z Z.3D Indoor Navigation: A Framework of Combining BIM with 3D GIS [C]. 44th ISOCARP Congress,2008
[2] 李德仁,刘强,朱庆. 数码城市GIS中建筑物室外与室内三维一体化表示与漫游[J].武汉大学学报:信息科学版,2003,28(3):253-258
[3] 刘兆宏,王科,丰江帆,等. 矢量室内地图建模与制作方法[J].数字通信,2012(8):77-80
[4] 徐敬海,李清泉,宋莺,等. 基于Kiwi数据格式的地图显示研究[J].武汉大学学报:信息科学版,2005,30(10):866-869
[5] 张兰,王光霞,袁田,等. 室内地图研究初探[J].测绘与空间地理信息,2013,36(9):43-47
[6] 刘冰,谢轲. 基于GIS的瓦片式地图切图算法的设计与实现[J].科技信息,2011(7):60-61
[7] 孙晓莉,赵俊三. DXF文件到Shape文件无损转换方法研究[J].科学技术与工程,2011,11(14) :3 336-3 341

图6 地貌晕渲
4 结 语
介绍了新编《湖北省地图集》的设计特点,力图通过丰富的地图语言全面、真实地反映湖北省自然地理、资源环境、经济社会、发展战略等状况,给相关部门开展经济、社会科学研究、进行省情综合分析、科学预测提供重要参考资料。
参考文献
[1] 尹贡白,王家耀,田德森,等.地图概论[M].北京:测绘出版,1995
[2] 祝国瑞,郭礼珍,尹贡白,等.地图设计与编绘[M].武汉:武汉大学出版社,2001
[3] 庞玉华.对地图集总体设计的思考[J].测绘通报,2007(5): 63-65
[4] 何丽华,徐丽坤,徐之俊,等.湖北省行政区划图集的编制[J].地理空间信息,2009,7(6):121-123
[5] 杨乃.专题地图中专题要素表达手段的研究[J].地理空间信息,2007,5(4):102-105
[6] 陶岚,漆炜,庞小平.南北极地图集的设计与特点[J].地理空间信息,2010,8(3):131-133
[7] 李志林,朱庆.数字高程模型[M]. 武汉:武汉测绘科技大学出版社,2000
作者简介:汪冰,高级工程师,主要从事各类地图的编制、建库工作。
P208
B
1672-4623(2015)03-0179-04
10.3969/j.issn.1672-4623.2015.03.063
赵建娇,讲师,研究方向为软件工程、地理信息系统。
2014-04-23。
项目来源:国家高技术研究发展计划基金资助项目(20 12AA12A207)。
