基于可靠性准则的施工控制网优化
2015-02-06蔡习文
蔡习文,伍 博,舒 适
(1.长江岩土工程总公司(武汉),湖北 武汉 430010)
基于可靠性准则的施工控制网优化
蔡习文1,伍 博1,舒 适1
(1.长江岩土工程总公司(武汉),湖北 武汉 430010)

以汉江孤山水利枢纽首级施工控制网的优化设计为例,提出了一种基于观测值内部可靠性指标的工程控制网优化设计方法。该方法在本质上属于模拟法,但增加可靠性指标后,具有量化的优化设计准则,不以人的知识和经验为转移,优化结果既具有一致性,也不失严密性。此方法对类似工程项目具有借鉴意义。
施工控制网;可靠性指标;优化设计;精度分析
汉江孤山水利枢纽首级控制网是整个水利枢纽工程在设计、施工、运营、监测等阶段的控制基准,其成果的精度和准确性对整个水利枢纽建设具有十分重要的意义。
1 控制网技术设计
1.1 平面控制网
根据规范[1]及设计要求,汉江孤山水利枢纽首级平面控制网设计为二等边角网,通过优化设计和实地选点,选出了由8个点构成的网形,在此基础上通过网点的精度估算、可靠性分析对观测方案进行优化设计。图1为初始方案。

1.1.1 控制网的内部可靠性和性质
对于施工控制网来说,由间接观测平差模型(l,Ax,σ02P-1)可得观测值的可靠性ri=(QvvP)ii[2],且满足
式中,ω0为非中心参数;n为观测值个数;t为必要观测值个数 ;ri为观测值li的多余观测分量;r为网的多余观测数;ri可以反映控制网发现观测值li(中误差为σi)中粗差的能力。ri愈大,能发现li中粗差的下界值∇0li愈小;或对同一粗差,检验功率愈大。
观测值相互独立时,有:

1.1.2 观测方案优化设计
在网形基本确定的情况下,对初始观测方案进行平差计算,对精度、可靠性进行分析,首先确定观测精度是否合理,若不合理,则需作适当调整。在观测值精度基本合理的基础上,基于观测值内部可靠性指标按从“密”到“疏”的策略进行网的优化设计[3]。具体方法是先确定一个恰当的ri0值,再按计算n0,根据差值(n-n0)确定应删去的观测值个数nq,对计算的观测值多余观测分量按从小到大的顺序排列,删去nd个多余观测分量较大的观测值,然后重新作观测值模拟计算。如观测值精度选择恰当,仅作1~2 次迭代计算即可得到优化设计方案。根据上述计算方法,全网方向观测优化后减少了10个角,相对于优化前工作量节省了25%;距离观测优化后减少了10条边,相对于优化前的工作量节省了25%。优化后可靠性因子及网点点位精度估算见表1、2。优化后的方案如图2。
从表1、2可知,最小的多余观测分量为0.5,表明优化后的控制网可靠性指标很好。从表3可知,优化后的控制网最弱点的点位中误差为1.6 mm,满足规范要求。
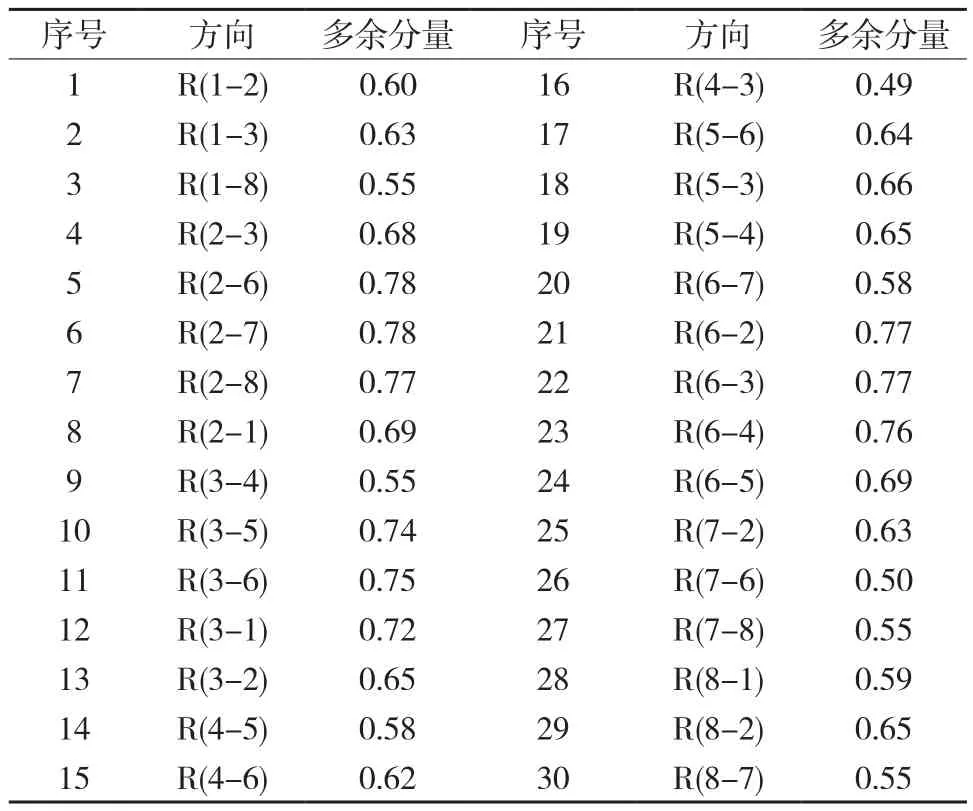
表1 方向观测值可靠性因子
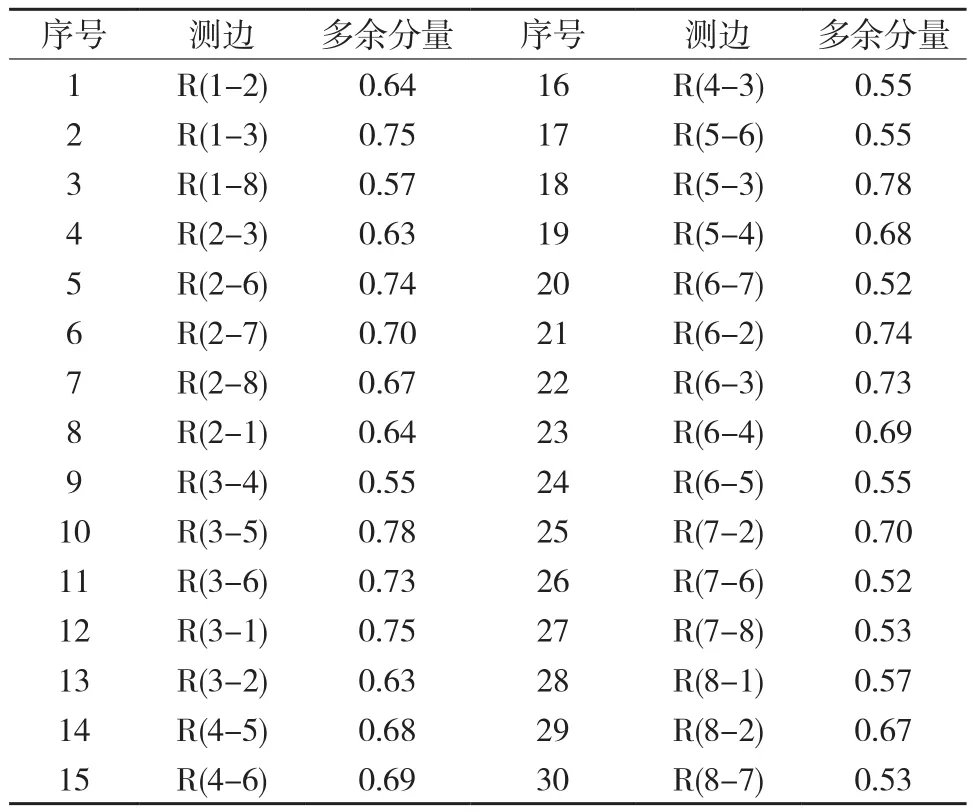
表2 测边观测值可靠性因子

表3 点位精度估算/mm
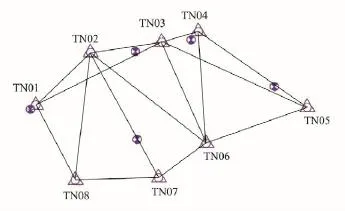
图2 优化方案
1.2 高程控制网
高程施工控制网分左、右两岸布设,共布设6个点。为保证两岸高程基准的一致性,在坝轴线的上游和下游处,用2条跨河水准测量将左、右两岸水准线路联测组成闭合环线。水准测量精度按《国家一、二等水准测量规范》中二等精度要求执行[4]。
2 控制网施测方案
2.1 选点与埋石
根据设计点位埋设标石,平面控制网共建造8座观测墩,高程控制网共建造6座水准基岩标。选择视野开阔,与其他点位尽可能多通视的平面控制网点位,视线旁离山体和其他物体至少5 m以上。点位布设还要考虑施工测量作业的方便,尽量满足组网图形强度。
平面施工控制网点埋设在基础坚实稳固的地方,对于覆盖层松软的部位要进行加固处理。标墩结构参照《水电水利工程施工测量规范》附录B1要求执行,各观测墩均安置强制对中基盘,对中精度优于0.1 mm。基盘表面需用长水准气泡置平,倾斜角小于4'。
高程控制网点位选择在顾及枢纽的总体布置情况下,按《国家一、二等水准测量规范》中选定水准点位的相关要求执行。
2.2 外业观测
2.2.1 平面网观测
全网共观测30个角、15条边长。采用徕卡TM30型全站仪(0.5',0.6 mm+1×10-6)进行观测。所使用的全站仪及设备,除送国家有关计量检定部门检定合格外,作业前和作业中还要对测角部分的2C互差和测距部分仪器加乘常数进行检定。
方向观测按《水电水利工程施工测量规范》要求执行。全网三角形闭合差不大于3.5",按菲列罗公式计算的测角中误差不大于1″。
距离观测按《水电水利工程施工测量规范》的要求采用往、返测距的方式进行。同时测定大气的干温、湿温及气压,以便进行气象改正。
2.2.2 高程网观测
高程控制网采用二等水准和跨河水准相结合的方式组成闭合环线。二等水准使用天宝DiNi03电子水准仪按《国家一、二等水准测量规范》执行,跨河水准采用徕卡TM30型全站仪按《水电水利工程施工测量规范》中光电测距三角高程导线测量法进行。为检测起算点高程的可靠性,还应与国家水准点进行联测。
2.2.3 数据处理与平差
平面观测数据用Leica TM30全站仪随机软件“徕卡三维变形监测软件”导出观测数据,人工编制适用于“控制网观测数据预处理与平差处理软件系统”的方向、距离和垂直角观测数据文件,然后编制综合数据文件及剩余相关数据文件后,即可进行测量平差。水准观测数据用天宝自带软件直接导出。
平差采用长江水利委员会长江勘测技术研究所编制的“控制网观测数据预处理与平差处理软件系统”[5]进行。
平面控制网平差参考基准采用一点一方位进行计算,选定起算点为TN02,起算方位为TN02-TN07,边长观测值投影到160 m黄海高程面。
3 精度分析
3.1 成果检验
外业平面控制网成果观测指标包括三角形闭合差、按菲列罗公式计算的测角中误差、重复边比较等指标,检查情况见表4。

表4 测角指标情况
从表4可以看出,三角形闭合差最大为2.6’,小于规范规定的3.5’;按菲列罗公式计算的测角中误差为0.86’,小于规范规定的1’。
全网共测18条边,测得距离平均值中误差为0.53 mm/km,小于 1.41 mm/km,符合要求。
高程控制网观测指标包括水准闭合差、每km水准测量高差中数偶然中误差等,检查情况见表5。
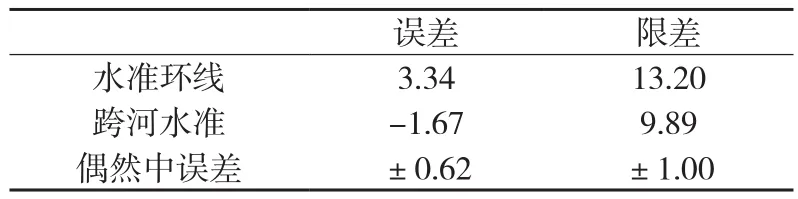
表5 水准指标情况/mm
3.2 网点精度分析
1)平面网实测精度。平面控制网的精度主要表现为点位中误差和最弱边的边长相对中误差。其中最弱边为TN03-TN04,其边长相对中误差为1/520 000,小于规范规定的5 mm。从表6可知,该网最弱点的点位中误差为1.12 mm,小于规范规定的5 mm。

表6 网点点位中误差/mm
2)高程网实测精度。高程网实测的每km水准测量高差中数偶然中误差为±0.62 mm,小于规范[4]规定的±1.0 mm。
4 结 语
基于观测值可靠性的优化设计是一种简单实用的方法,能够在精度、可靠性、经费等方面达到综合最优,可以推广到其他控制网及变形网的优化设计中。
[1] DL/T5173-2003.水电水利工程施工测量规范[S].
[2] 刘祖强,张正禄,邹启新,等.工程变形监测分析预报的理论与实践[M].北京:中国水利水电出版社,2008
[3] 胡万兵,刘祖强,贾进科,等.皂市枢纽首级施工控制网设计及施测精度分析[J].人民长江,2008(21):11-13
[4] GB/T 12897-2006.国家一、二等水准测量规范[S].
[5] 黄汝麟.控制网观测数据预处理与平差处理软件系统[J].人民长江,2002(6):48-50
[6] 艾广山.桥梁控制网的优化设计[J].测绘与空间地理信息,2012(12):155-156
[7] 陈现春,羊凯东,钟文俊.南京长江四桥首级施工控制网的建立[J].四川测绘,2008(2):19-22
P221
B
1672-4623(2015)03-0165-03
10.3969/j.issn.1672-4623.2015.03.058
蔡习文,工程师,从事工程测量技术工作。
2014-04-16。
