基于Matlab无刷直流电机建模与仿真
2015-02-06西安武警工程大学信息工程系
西安武警工程大学信息工程系 周 沙
基于Matlab无刷直流电机建模与仿真
西安武警工程大学信息工程系 周 沙
为了验证控制策略和电机参数设计的合理性,基Matlab/Simulink平台,从无刷直流电机数学模型入手,构建了无刷直流电机的仿真模型,系统采用双闭环控制,速度环采用离散PID控制,根据滞环电流跟踪型PWM逆变器原理实现电流控制,同时详细介绍电机各个模块的组成,通过电机仿真,给出仿真曲线,验证了该模型的正确性。
无刷直流电机;建模;仿真
1 引言
无刷直流电机(Brushless DC Motor,以下简称BLDCM)具有体积小、重量轻、控制精度高等优点,由于它卓越的性能和不可替代的优势使其在伺服控制、数控机床、机器人等领域得到广泛应用,受到人们广泛关注。随着无刷直流电机不断的发展进步,对无刷电机的要求也越来越高。而在无刷直流电机控制系统中通过数学分析、建模仿真手段,可以更好的掌握系统动态特性,验证系统是否合理。本文在分析无刷直流电机数学模型的基础上,通过matlab/simulink建立仿真模型,并对结构分析验证了该模型的有效性。
2 无刷直流电机的数学模型
无刷直流电机由定子三相绕组、永磁转子、逆变器、转子磁极位置检测器等组成,其转子采用瓦形磁钢,进行特殊的磁路设计,可获得梯形波的气隙磁场,定子采用整距集中绕组,由逆变器供给方波电流。本文以两相导通星形三相六状态为例,为了便于分析,假定:忽略电机铁心饱和齿槽效应,不计涡流损耗和磁滞损耗,不计电枢反应,气隙磁场分布近似为平顶宽度为电角度梯形波,电路的功率管和续流二极管均是理想器件,那么三相绕组电压方程可以表示为:
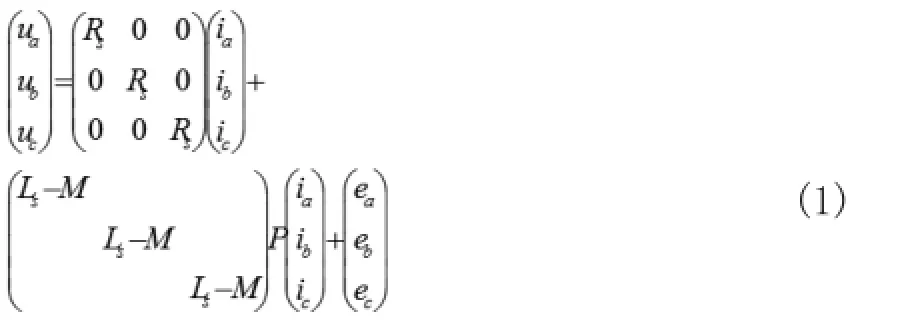
由于在任意时刻电机的电磁功率是三相绕组电磁功率的和,所以:

又有:

因此无刷直流电机的电磁转矩为:

3 基于Matlab的BLDCM系统模型的建立
图1即为BLDCM建模的整体控制框图,其中主要包括:BLDCM本体模块、速度控制模块、参考电流模块、电流滞环控制模块和电压逆变器模块。在无刷直流电机控制系统中,控制器根据控制策略产生电机速度调节、转向控制信号,采用位置检测器产生代表电机转子的位置信号,电子换向器对转子位置信号、电机调速和方向控制信号进行逻辑综合,产生相应的开关信号,开关信号以一定的顺序触发逆变器中的功率开关管,将电源功率以一定的逻辑关系分配给电机定子的三相绕组,使电机产生持续转矩。下面根据各模块功能详细介绍。

图1 BLDC控制系统设计框图
3.1 电机位置传感器的建模
位置检测器在直流无刷电动机中检测转子磁极位置,为逻辑开关电路提供正确的换向信息,即将转子磁钢磁极的位置信号转化为电信号,控制定子绕组换向。图2为三相全桥式驱动电路结构示意图,如采用两两导通方式,转子每转过60度时,逆变桥就进行一次换流,定子磁状态就相应改变一次,由于每时刻都有两个功率管同时导通,由此可见,电机有6个状态,每一个状态都是两相导通。依次为T6T1、T1T2、T2T3、T3T4、T4T5、T5T6、T6T1…,根据导通顺序列出换相逻辑如表1所示。

图2 三相全桥式驱动电路

表1 逻辑关系图
根据表1逻辑关系图可用matlab/simulink中的模块实现,如图3所示,根据各功率管导通的顺序得出逻辑信号的表达式,并通过控制PWM信号来控制逆变器各功率管的关断。
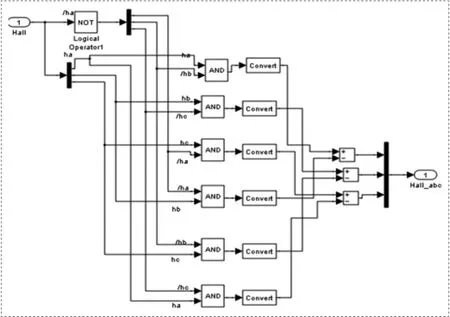
图3 换相逻辑模块建模
3.2 逆变器模块建模
对逆变器的建模,本文采用simulink的SimPowerSystem工具箱提供的三相全桥IGBT模块。通过给IGBT的A、B、C三相加三个电压表,输出的Simulink信号可以与BLDC直接连接,逆变器根据电流控制模块所控制PWM信号,顺序导通和关断,产生方波电流输出。
3.3 驱动控制模块建模
无刷直流电机调速系统一般采用双闭环控制,其中外环是速度环,内环是电流环。速度给定信号与速度反馈信号比较后,送入速度调节器。速度调节器的输出为电流给定的幅值,与电流反馈信号比较后,送入电流滞环比较器或通过电流调节器,电流滞环比较器具有控制简单、性能良好的特点,所以是目前采用得较多的电流控制器。电流滞环控制仿真如图4所示。
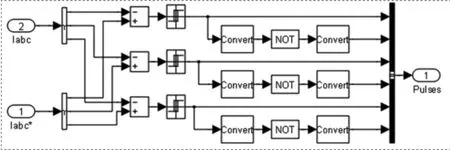
图4 电流滞环控制模块
4 仿真结果及分析

图5 无刷直流电机的控制系统图
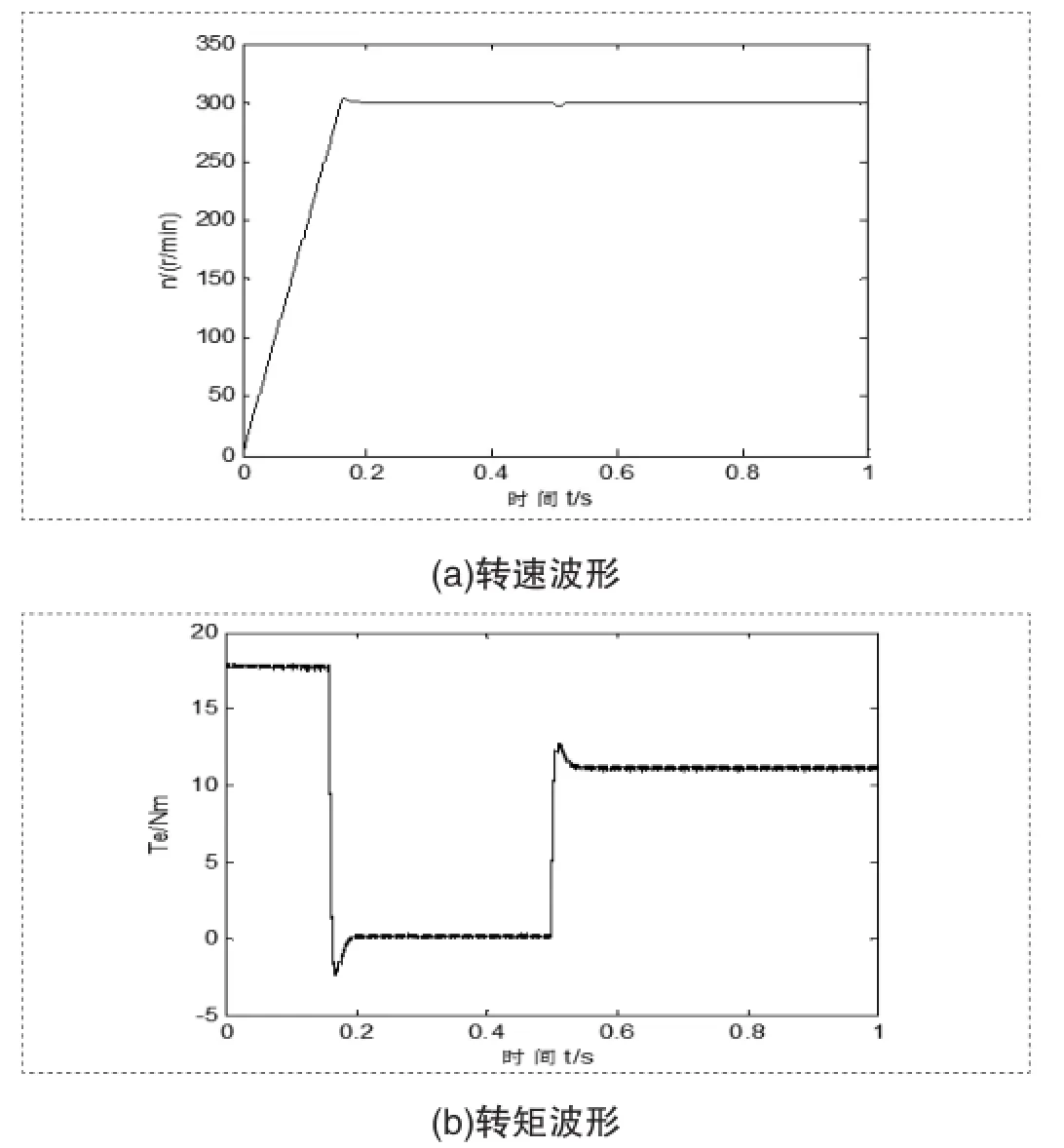
图6 仿真波形图
为了验证所提控制算法的有效性和可行性,在MATLAB环境下建立如图5所示的无刷直流电机的控制系统。其中电机的参数为:定子电阻=7.3Ω,转动惯量=0.002316kg·m2,定子电感=0.2H,反电动势增益=0.25V/rad/sec,极对数P=2。
由图6仿真波形可以看出,在n=300r/min的参考转速下,系统响应快速且平稳,相电流和转矩波形较为理想。空载稳速运行时,忽略系统的摩擦转矩,因而此时的电磁转矩均值为零;在t=0.5s时突加负载,转速发生突降,但又能迅速恢复到平衡状态。由仿真波形可以看出,与预想结果一致,证明了本文所提出的这种BLDCM仿真建模方法的有效性及控制系统的合理性。
5 结论
本文根据无刷电机数学模型建立了在Matlab下的动态数学模型,通过电机的仿真曲线可以看出,采用Simulink建立的无刷电机模型所的结果与理论分析基本一致,从而说明这种电机模型是正确的和有效的。采用该模型可以方便的实现和验证控制功能,它为分析设计BLDCM控制系统提供了有效方便的方法。
[1]刘锦波.电机与拖动[M].清华大学出版社,2006.
[2]夏长亮.无刷直流电机控制系统[M].机械工业出版社,2009.
[3]沈建新,陈永校.永磁无刷直流电动机基于反电势的无传感器控制技术综述[J].微特电机,2006(7):36-40.
[4]韦鳃,任军军,张仲超.三次谐波检测无刷直流电机转子位置的研究[J].中国电机工程学报,2004,24(5):163-167.
[5]王晋,陶桂林,周理兵,等.基于换相过程分析的无刷直流电动机机械特性的研究[J].中国电机工程学报,2005,25(14):141-145.
[6]李榕,刘卫国,刘向阳,等.永磁无刷直流电机消除逆变换流的弱磁性能研究[J].电工技术学报,2007,22(9):62-67.
周沙(1992—),男,湖南衡阳人,硕士研究生,研究方向为电机控制系统。
