国产机载LiDAR系统集成误差检校方法的比较
2015-02-06刘田龙谢劭峰左建章
刘田龙,常 虹,谢劭峰,左建章
(1.桂林理工大学 测绘地理信息学院,广西 桂林 541004;2.中国测绘科学研究院,北京 100039;3.云南省基础地理信息中心,云南 昆明 650032)
国产机载LiDAR系统集成误差检校方法的比较
刘田龙1,2,常 虹3,谢劭峰1,左建章2
(1.桂林理工大学 测绘地理信息学院,广西 桂林 541004;2.中国测绘科学研究院,北京 100039;3.云南省基础地理信息中心,云南 昆明 650032)
以国产SW-LiDAR系统为例,结合具体试验数据,对SW-LiDAR系统安置角误差检校方法进行比较。
机载LiDAR; 安置角误差;集成检校; 国产化
机载激光雷达(LiDAR)系统主要集成了激光测距仪、惯性测量系统、GPS接收机、中央控制系统、CCD相机及稳定平台等硬件。为了获得高精度的激光脚点坐标,需要对系统进行起飞前的单机检校和在航检校来消除系统集成误差。本文根据先后在陕西省汉中市多次飞行试验得到的数据,对只需选择特征地物,而不需要事先布设地面控制点的安置角误差检校方法进行了比较研究,并给出了详细的检校过程[1]。
1 SW-LiDAR系统集成误差
SW-LiDAR系统的误差可以分为2个方面:①量测误差,主要包括测距误差、GPS定位误差、IMU姿态误差;②集成误差,即系统各部件观测值集成过程中的系统集成误差,包括硬件安置角误差和数据处理误差。硬件安置误差是SW-LiDAR系统中各个子系统安置在一起时产生的误差,主要有偏心距误差、照准误差、角度步进误差,扭矩误差。数据处理误差是各个系统获取的数据进行整合处理时产生的误差,包括时间同步误差、内插误差、坐标转换误差等[2]。机载激光雷达系统误差检校的目的就是要确定所有系统误差,通过飞行试验数据进行系统误差改正,使其最终只剩下随机误差。
2 SW-LiDAR安置角检校原理
SW-LiDAR对地定位的坐标转换顺序为:瞬时激光坐标系→激光扫描坐标系→载体坐标系→惯性平台坐标系→当地平台坐标系→当地水平坐标系→当地垂直坐标系→WGS84坐标系。可以设某一束激光从发射点到目标点的距离为ρ,根据对瞬时激光坐标系的定义,此时激光脚点的坐标为(xSL,ySL,zSL),并有:

为了使用方便,还需要将WGS84坐标系进一步转化为局部坐标系。各坐标系之间的相互关系如图1所示。由此可以得出LiDAR的构像方程为:
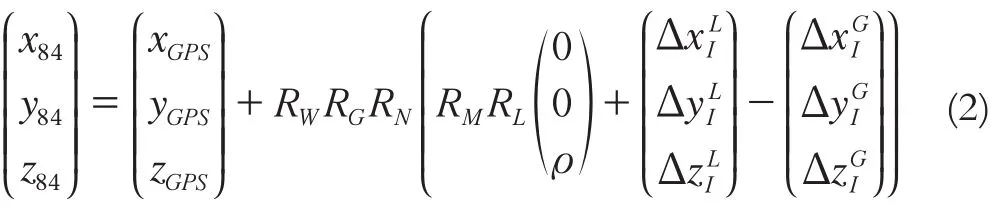
为了简单表示,可用向量表示为:

式中,P=(x84y84z84)T是激光脚点在WGS84系中的坐标;PWGS=(xGPSyGPSzGPS)T是天线相位中心在WGS84系中的坐标;r=(0 0 ρ)T是激光脚点在瞬时激光束坐标系中的位置向量[3,4]。
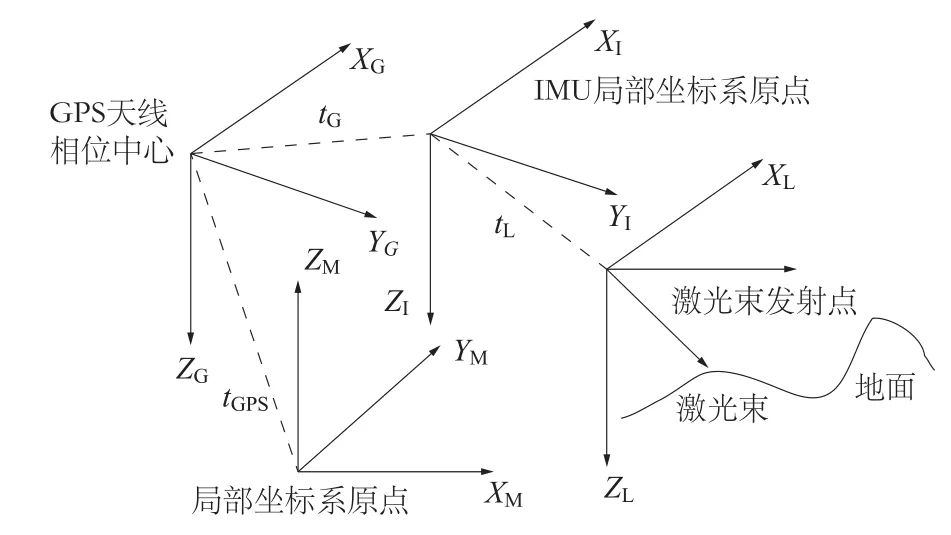
图1 机载LiDAR系统坐标系之间的转换关系
由于安置角的存在,不同航带重叠区域的同一地物表现出不重合,可以通过此特点选取固定地物的位置移动来进行安置角的检校改正,但是在检校过程中,不同的检校顺序对结果影响是不同的。试验表明,以Roll、Pitch、Heading的顺序进行检校效果是最好的。
3 安置角检校方法的比较
3.1 飞行航线及质量要求
通过对安置角误差的分析可知,需要设计如下几条航线:①与飞机场跑道方向垂直,且穿过跑道上方、方向相反的2条重叠航线;②与尖顶房屋脊线方向垂直,且穿过屋顶上方、方向相反的2条重叠航线;③与水平楼顶方向垂直,且穿过楼等上方、方向相同的2条平行航线(相邻航带有30%的重叠)。航线设计如图2所示[5]。
图2 飞行航线设计图
机载LiDAR飞行质量要求:
1)“8”字飞行:避免IMU受累计误差影响。要求进入第一条航线前先平飞5 min,然后作“8”字转弯飞行,出最后一条航线后,再作“8”字转弯飞行,平飞5 min。
2)GPS静止观测:飞机在起飞前,需要地面静态GPS观测5 min。飞机落地后,也需静态GPS观测5 min。
3)盘旋转弯坡度:转弯坡度<22°,最好在15°~20°之间。
4)航线上飞行姿态:侧滚角(Roll)<5°;俯仰角(Pitch)<5°;偏航角(Heading)<20°。
3.2 安置角的检校步骤
中国科学院光电研究院在最近几年开发出了一种新型的扫描方式——四面塔镜扫描方式。每个镜面与转轴的夹角为44.5°,扫描点在地面上形成一簇弧形扫描平行线。该种扫描方式扫描视场角可达90°,并且能360°扫描,大大提高了扫描效率。
由于扫描方式的不同,解算过程中采用的解算方法不同,数据结果也会略微不同。本文采用4个镜面单独检校与4个镜面集成检校来进行误差对比,分析4个镜面集成检校是否能达到精度要求,从而提高数据后处理的解算效率[6]。
下面就以汉中市2个架次飞行试验数据为例,采用点云数据预处理软件SS-LiPre对3个安置角误差依次进行单镜面检校和4个镜面集成检校分析。
3.2.1 侧滚角检校
由于Roll角的存在使平面扫描线产生倾斜,被扫描物体平面位置沿着扫描方向产生位移,利用TerraScan软件加载这两条航线的点云数据,并沿着飞机场跑道方向切取多个垂直断面,切得的这些断面均为2条相交的直线,这两条直线的夹角为所求侧滚角的2倍,如图3所示。式中,Δ r为侧滚角改正值;d为往返飞时公路断面的相对距离。利用多个段面的均值作为侧滚角的检校值,根据飞行方向确定检校值的正负,重新把改正值输入到SS-LiPre软件,重复检校直到2条航线之间的高差满足限差要求[7]。

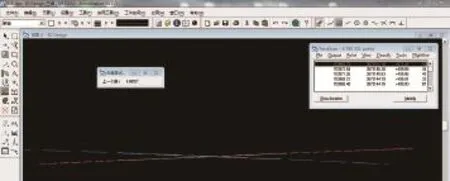
图 3 侧滚角检校
3.2.2 俯仰角检校
由于Pitch的存在使被扫描物体的位置沿垂直于扫描方向产生位移,利用TerraScan显示出这2条航线上的点云数据,沿着屋脊线的垂直方向在屋脊中间处切取多个断面,2个屋脊线的顶点在水平方向上存在明显的位移,如图4所示。

式中,Δ p为俯仰角改正值;d为同一地物中心位置之间的距离;h为平均航高。根据式(5)得到多个俯仰角,求出均值作为俯仰角的检校值代入SS-LiPre软件,反复进行调整,直到人字顶最大限度重合。

图 4 俯仰角检校
3.2.3 航偏角检校
选取垂直于平顶建筑物且沿相同方向飞行的2条航线(AB和DC) 进行检校,

式中,Δ H为航偏角改正值;S为同一建筑物几何中心在两条航线中的距离;D为两航带之间的距离。如图5所示,多次测量取均值作为检校值,根据飞行方向确定出正负,多次进行检校直到两建筑物几何中心重合为止。
3.3 精度评定与分析
1)单镜面安置角解算结果。平面位置精度评定利用垂直墙面上的激光点,本应该共面、投影到xy面时应该共线,但由于误差的存在,拟合出的点云并不是一条直线,求得各个镜面的残差中误差(如表1、表2)[8,9]。
高程精度评定采用水平的楼顶,理论上点云的高程应该是相等的,但是由于误差的存在,这些点云并不共面,选取数量够多的点云求得各个镜面的残差中误差(如表1、表2)。
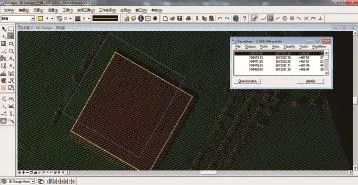
图5 航偏角检校
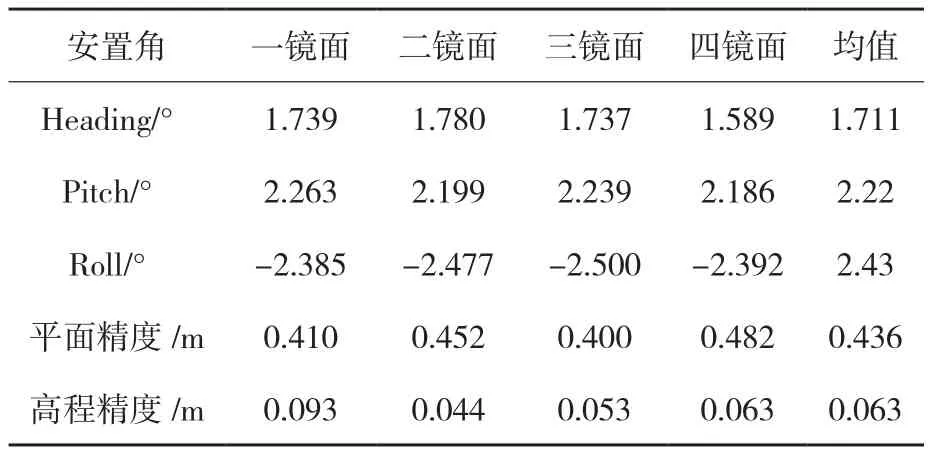
表1 第1架次单镜面安置角检校结果
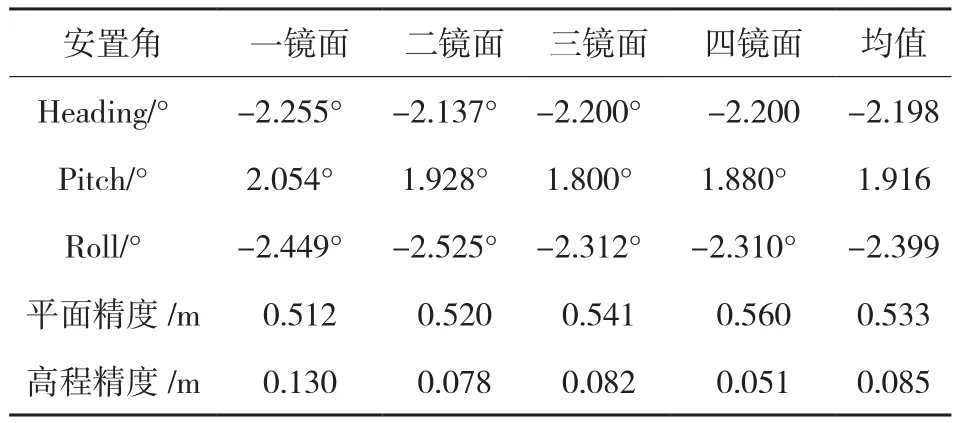
表2 第2架次单镜面安置角检校结果
从表1、表2可以看出,侧滚角的值最大,对点云数据的影响最大,所以侧滚角的检校很关键,检校不准确将会直接影响后面角度的改正。高程精度明显优于平面精度,验证了机载LiDAR在高程方面的优势。将解算出的安置角对点云数据进行改正,并与检校前的点云数据进行比较,发现检校后的点云数据吻合的很好。
2)4个镜面集成检校结果。4个镜面集成检校同样采用单镜面解算方法,不同的是在SS-LiPre软件中要改变配置参数,精度评定与检校结果见表3、表4。
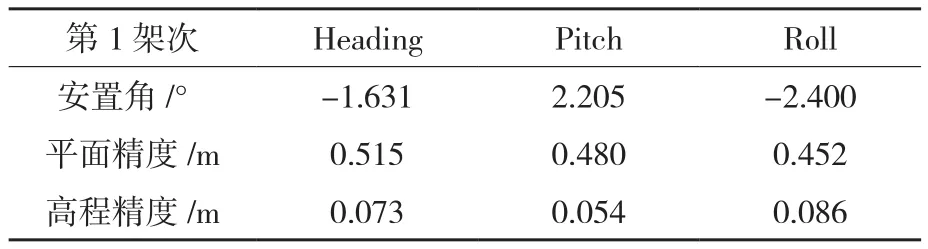
表3 第1架次4个镜面安置角集成检校结果
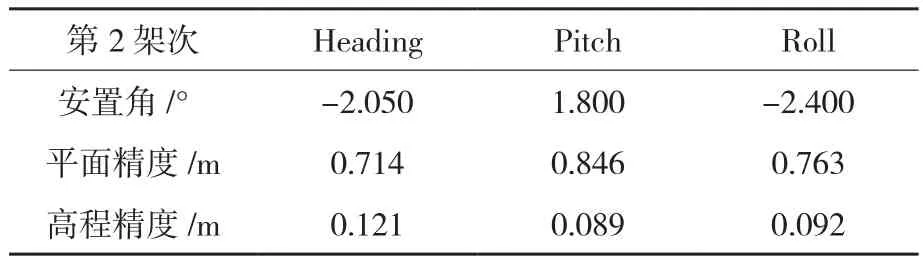
表 4 第2架次4个镜面安置角集成检校结果
从整个解算结果可以看出,第1架次的4个镜面集成检校的结果完全满足单个镜面检校的要求,第2架次也能满足精度要求,说明这种新的四面塔镜扫描方式可以完全按照4个镜面集成检校方法进行,在一定程度上缩短了数据后处理的时间,提高了作业的效率。
[1] 张小红.机载激光雷达测量技术理论与方法[M].武汉: 武汉大学出版社,2007
[2] 刘磊,机载LiDAR系统误差分析与检校方法研究[D].青岛:山东科技大学,2011
[3] 赖旭东.机载激光雷达基础原理与应用[M].北京:电子工业出版社,2010
[4] 左建章,关艳玲,李军杰,等.高精度轻小型航空遥感系统集成与实现[M].北京:测绘出版社,2014
[5] 成枢,张艳亭,马浩,等.国产机载LiDAR安置角误差检校初探[J].测绘通报,2013(1):37-40
[6] 李世明.机载LiDAR系统检校与应用探索分析[D].昆明:昆明理工大学,2013
[7] 刘经南,张小红,李征航.影响机载激光扫描测高精度的系统误差分析[J].武汉大学学报:信息科学版,2002,27(2):111-117
[8] 王成,Menenti M,Toll M P,等.机载激光雷达的误差分析及校正[J].遥感学报,2007,11(3):390-396
[9] 王致华,张爱武,王书民,等.基于重叠航带的机载激光雷达系统检校 [J].中国激光,2014,41(2):1-8
P237.3
B
1672-4623(2015)02-0028-03
10.3969/j.issn.1672-4623.2015.02.011
刘田龙,硕士,研究方向为机载激光雷达数据获取与应用。
2014-09-24。
项目来源:国家科技支撑计划资助项目(2012BAH34B00);国家测绘地理信息局科技资助项目(201305C022);测绘地理信息公益性行业科研专项资助项目(201412020);广西空间信息与测绘重点实验室资助项目(13-051-14-18、11-031-08-26)。
