利用双经纬仪高精度标定机载雷达天线阵面
2015-02-06惠广裕武瑞娟
惠广裕,武瑞娟
(1.中国飞行试验研究院,陕西 西安 710089)
利用双经纬仪高精度标定机载雷达天线阵面
惠广裕1,武瑞娟1
(1.中国飞行试验研究院,陕西 西安 710089)

从测量原理、误差分析模型2个方面详述了双台经纬仪空间前方交会法的数学原理和精度评定方法,结合工程应用实践,介绍了该方法的作业流程。通过跟单台全站仪的测量结果进行对比,得出在精密标校任务中,双台经纬仪交会测量法更好。
雷达天线;经纬仪;前方交会;安装误差;精度校准
在飞行试验中,经常需要在较大范围内对飞机上安装的雷达天线部件进行标校测量。传统的标校方法——全站仪标校法,由于精度偏低,无法满足测量要求。本文主要讨论如何利用双经纬仪实现对机载火控天线阵面的高精度标定。
1 测量原理
双经纬仪三坐标交会测量系统所采用的是空间前方交会法。如图1所示,电子经纬仪1置于O点,电子经纬仪2置于N点,观测目标在P点,测量坐标系以O点为坐标系原点,O、N连线在水平面内的投影为X轴,水平面内过O点作X轴的垂线为Y轴,Z轴垂直XOY平面向上(坐标系为左手系)。电子经纬仪互瞄的方位角和俯仰角分别为AON、EON、ANO、ENO;电子经纬仪1测得P点的方位角为AOP,俯仰角为EOP;电子经纬仪2测得P点的方位角为ANP,俯仰角为ENP。

令水平角A1、A2为:若两电子经纬仪在x方向投影间距(基线长)a已知,则由空间几何关系可以求出P点的三维坐标:
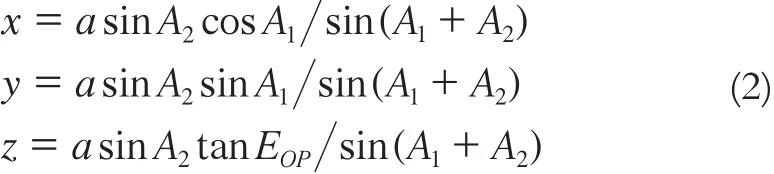
在实际测量时,只要测量A1、A2和EOP,就可以计算出被测点的坐标值。
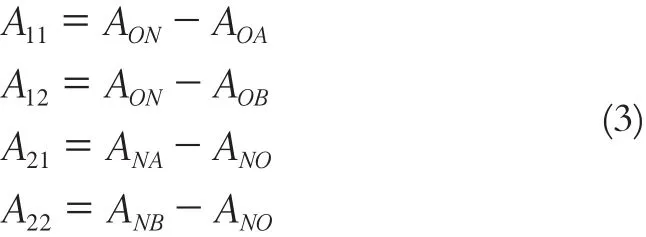
确定基线a:利用电子经纬仪对已知其精确长度L的基准尺两个端点A和B进行观测,反算基线长a。记电子经纬仪互瞄的方位角和俯仰角分别为AON、EON、ANO、ENO;电子经纬仪1对A和B测得的方位角分别是AOA、AOB,俯仰角分别是EOA、EOB;电子经纬仪2对A和B测得的方位角分别是ANA、ANB。
令水平角A11、A12、A21、A22为:
利用式(2)可得A、B两点的三维坐标为(xA,yA,zA),(xB,yB,zB)。A、B两点的距离为:

将A、B两点三维坐标代入上式,反算基线得:

其中,
2 误差分析
2.1 水平角与垂直角方差计算
测量作业中,观测值分别为方位角和俯仰角,可根据误差传播定律推导角度观测值方差计算公式。利用协方差传播定律并结合式(1)得:
式中,σ2A1为水平角A1的方差;σ2AOP为方位观测值AOP的方差;σ2A2意义同σ2A1,其余参数意义同σ2AOP。
因为垂直角EOP即是俯仰角观测值EOP,因此σ2EOP= σ2EOP。
2.2 基线标定方差计算

在测量作业中,对基准尺的测量是为了提供一个尺度控制条件,基准尺的长度测量即构成距离条件。利用协方差传播定律并结合式(5)得:式中,Ma是基线标定误差;MA11、MA12、MA21、MA22是水平角的测量误差;MEOA、MEOB为俯仰角测量误差;faA11是误差传递系数,通过a对A11求一阶偏导得到,其余系数与faA11表达意义相同。
2.3 点位误差分析
对式(2)分别求微分,可以计算出被测点3个方向的点位误差和合成误差。微分后的表达式比较复杂,但是它的函数关系可以表示为:
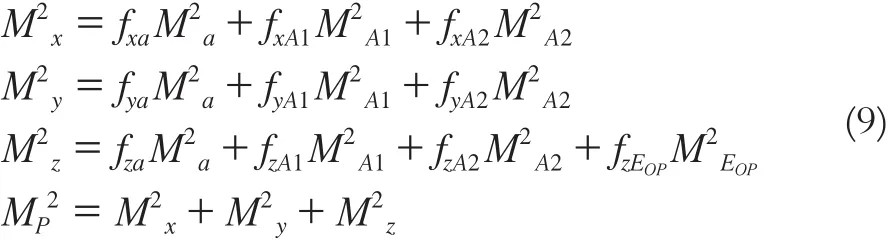
式中,Mx、My、Mz、Mp分别表示x、y、z 方向点位误差和合成误差;Ma是基线标定误差;MA1、MA2是水平角的测量误差;MEOP为俯仰角测量误差;fxa是误差传递系数,通过x对a求一阶偏导得到;其余系数参数与fxa表达意义相同。
3 标定方法
3.1 测试系统组成
测试系统主要有TDA5005电子经纬仪(测角精度0.5")2台;数据采集和事后数据处理软件1套;经标定的长度为1 m的标准尺(精度为0.01 mm)1把;数据线缆、反射片等附件。系统构建如图2。
3.2 测量方法
1)在雷达天线阵面上均匀布置反射片,反射片作为阵面特征点存在,为双经纬仪测量系统提供测量目标。
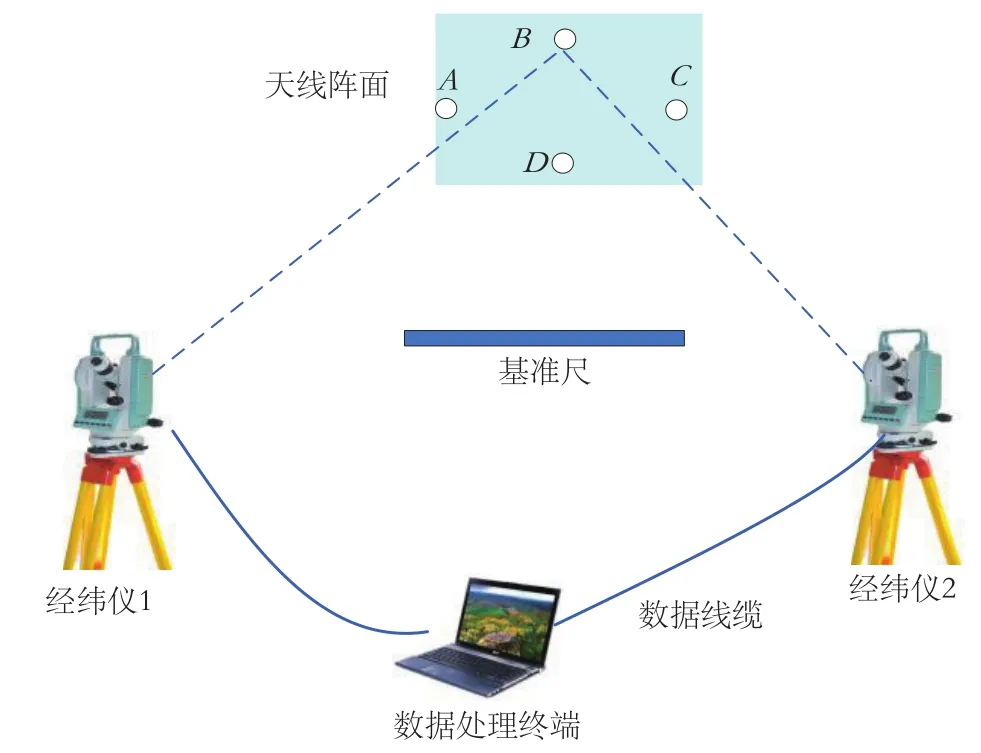
图2 测试系统组成
2)根据阵面反射片布置的情况,选择合适的位置架站A和B,使2台设备交会角分布在60°~120°之间。
3)相对定向。用互瞄内觇标法直接测定。2台经纬仪互相对瞄望远镜内的内觇标,并对内觇标进行观测读数,作为起始方位。
4)绝对定向。使用双经纬仪测量系统对基准尺的两端点分别进行观测并记录数据。
5)天线面阵单点测量。自测站A和B分别对面阵上的特征点(A、B、C、D)进行观测。
3.3 计算方法
表1为双台经纬仪交会测量天线阵面数据,现利用表中数据计算天线阵面安装角。
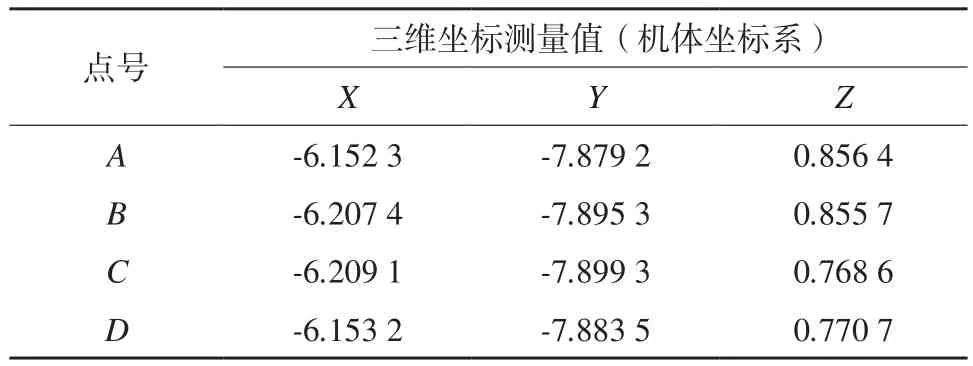
表1 双台经纬仪交会测量数据/m
令空间平面方程为Ax+By+Cz+1=0,n=(A,B,C),测量点Pi的坐标为(xi,yi,zi),则点Pi到拟合平面的有向距离为di=nPi+1。根据最小二乘原理,S=∑di2要最小。用S分别对A、B、C求偏导,解三元一次方程组即可。根据测量数据计算得到拟合平面方程为:
-0.046 5x+0.162 4y-0.007 1z+1=0
方位角是指机载雷达阵面与水平面的交线在水平面内与航向的夹角,按下式计算:

俯仰角是指机载雷达阵面与水平面的夹角。按下式计算:

根据测量数据和式(11)计算的俯仰角E=87°35'36"3.4 精度评定
本次测试,仪器角度中误差为0.5",按照式(7)~(9)分别计算σA1、σA2、Ma、Mx、My、MZ、Mp。计算结果:σA1=0.707",σA2=0.707",Ma=0.024 mm,Mx=0.052 mm,My=0.073 mm,MZ=0.068 mm,Mp=0.112 mm。
为验证现场实测精度,对精度为0.01 mm,长度为1 m的基准尺进行多次测量,测量结果见表2。
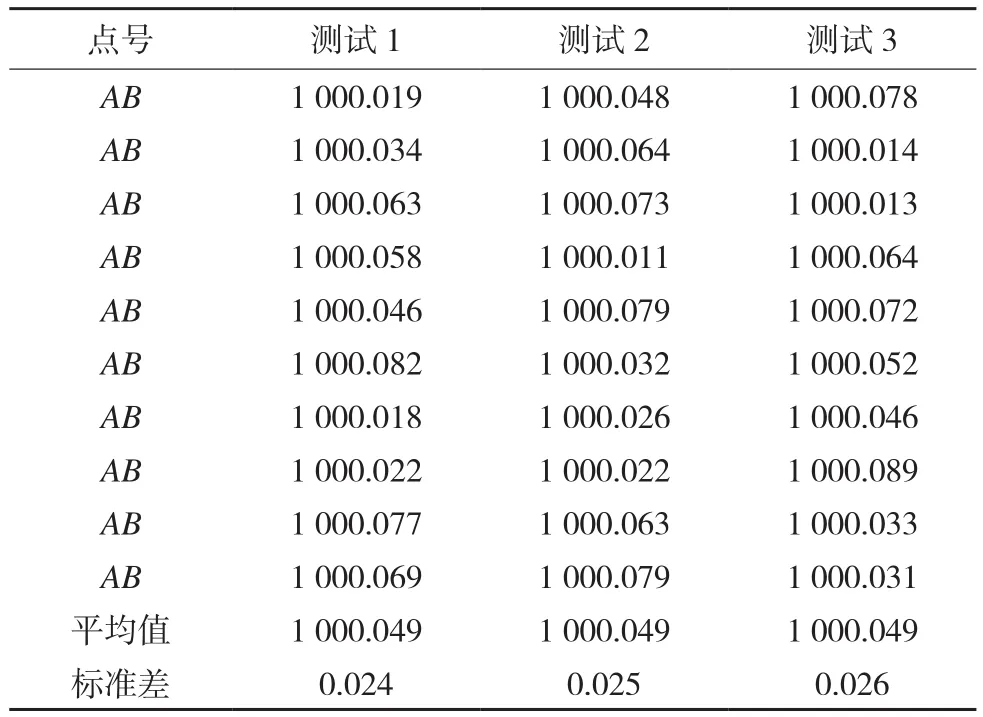
表2 基于同一基准尺3次测试检核试验数据
从表2可以看出,对基准尺进行3次测量的平均值分别是1 000.049、1 000.049、1 000.049,总平均值为1 000.049;距离标准差Ma分别是0.024、0.025、0.026;由距离标准差可以推算此次测量的点位误差Mp为0.113 mm,试验结果证明本次测试精度满足天线阵面标定精度要求。
基于双经纬仪测量系统对机载雷达天线高精度标定的应用表明,本方法能够很好地满足雷达天线阵面标校的精度要求,方法简单,实用性强。
[1] 冯文灏.工业测量方法及其选用的基本原则[J].武汉大学学报:信息科学版,2001,26(4):331-336
[2] 冯文灏.建立积木式三维工业测量系统的研究[J].武汉大学学报:信息科学版,2002,27(4):403-407
[3] Xiong C B.Ye S H.Theoretical Study on the Model of Theodolite Industrial Measurement System[J].Journal of Wuhan Technical University of Surveying and Mapping,1998,23(3):233-237
[4] 李广云.工业测量系统进展[M].北京:解放军出版社,2000
[5] 徐忠阳.电子经纬仪在工业测量中的应用[J].军测科技,1990(2):15-19
[6] 刘利生.外测数据事后处理[M].北京:国防工业出版社,2000
[7] 周绍光,熊仁生,吴圣雄.交会测量多弹道方法研究[J].测绘学报,1997,26(3):213-220
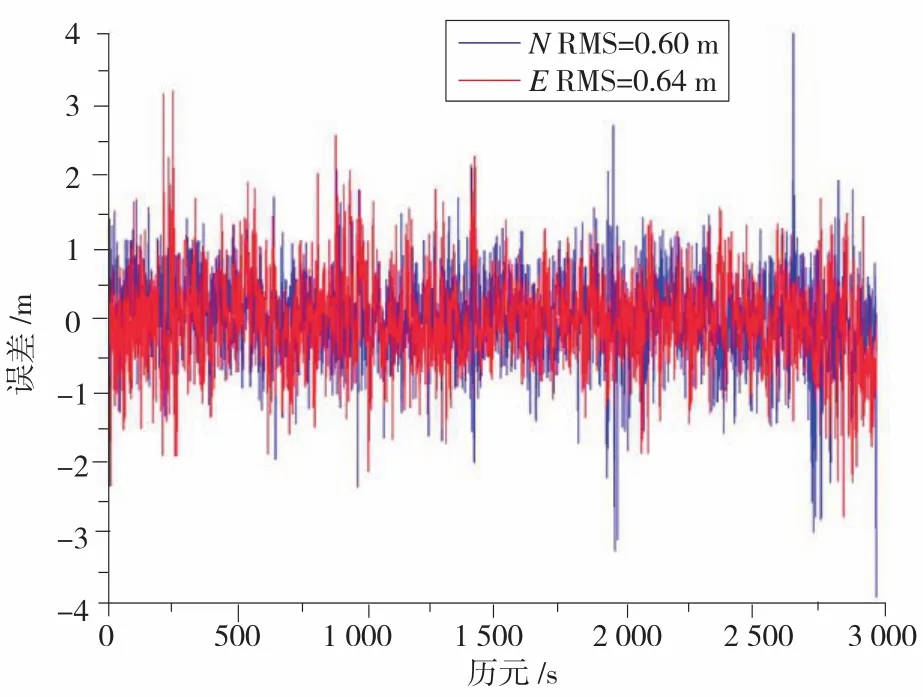
图3 动态定位误差
4 结 语
本文以Android终端为平台,通过外设GPS模块获取GPS观测数据,并连接CORS获取差分数据,最终在Android终端上进行伪距差分定位。测试结果表明,系统的平面定位精度达到亚m级,满足多数地理信息采集的精度要求。
参考文献
[1] 邓健,王庆,潘树国,等.基于多参考站的分米级GPS伪距差分定位方法[J].东南大学学报:自然科学版,2010(2):316-319
[2] 汪伟,史廷玉,张志全.CORS系统的应用发展及展望[J].城市勘测,2010(3):45-47
[3] 罗富财.基于Android平台的蓝牙通讯系统的研究与实现[D].保定:华北电力大学,2013
[4] 刘科,聂桂根,范叹奇,等.基于Ntrip协议的差分数据实时传输平台及定位研究[J].测绘信息与工程,2009,34(1):7-9
[5] 李思超,叶甜春,徐建华,等.DGPS RTCM数据格式简介及其解码算法实现[J].电子测量技术,2008,31(12):11-14
[6] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005
[7] 李健.联合型连续运行基准站网的动态定位服务机制[D].郑州:信息工程大学,2011
第一作者简介:程锋,硕士,研究方向为卫星定位技术及其应用。
P221
B
1672-4623(2015)03-0036-03
10.3969/j.issn.1672-4623.2015.03.013
惠广裕,硕士,研究方向为飞行试验光电测试技术。
2014-03-26。
项目来源:航空科学基金资助项目(2012ZD30)。
