Canny边缘检测在等离子显示器精密定位中的应用
2015-02-05南京邮电大学计算机学院
南京邮电大学计算机学院 洪 磊
南京师范大学电气与自动化工程学院 范育奇
Canny边缘检测在等离子显示器精密定位中的应用
南京邮电大学计算机学院 洪 磊
南京师范大学电气与自动化工程学院 范育奇
介绍了Canny算子边缘检测的基本原理,阐述了其优越性。分析了基于计算机视觉的等离子显示器屏板定位的工作原理,将Canny算法运用到等离子显示器定位中的图像处理环节。结合算法实现步骤,分析并说明了其遵循的基本原则。最后在MATLAB环境下编译并调试,对其理论进行实验验证。实验结果表明,经过直方图均衡化后的图像有效的减少了噪音的干扰,在此基础上Canny边缘检测的结果可以清晰的显示出图像的边缘信息,显示器的三块板子之间的相对位置更加明显,非常适用于精密定位。
Canny检测算法;等离子显示器;直方图均衡化;精密定位
引言
边缘,是一个图像最重要的特征之一,边缘检测也是图像处理以及机器视觉涉及到的基本问题,所谓边缘,就是指待测图像其像素灰度存在屋顶形状变动抑或阶跃型变动的所有像素点的集合,其作用就是区分开目标图像中亮度变化较其他区域明显的像素点。边缘信息涵盖了图像中的主要内容,具备了图像的主要特征,因此,对图像进行边缘提取能够从很大程度上缩小数据处理范围,大大减小工作量,同时削减了无关信息,保留了原始图像重要的结构特性。
精密定位是当今社会热门话题之一,本文所选取实验对象是由东南大学自主研发出的荫罩式等离子显示器(SMPDP),在对其进行粗定位时利用机器视觉检测技术,粗定位的定位精度可达微米级别。简单来说,机器视觉检测系统是让计算机模拟人眼视觉感知功能,从而对目标图像进行识别、检测以及处理的系统。定位时,计算机需要对接收到的三块板子的相对位置图像进行去噪、平滑、边缘检测等预处理。而边缘作为图像信息最关键的要素之一,在图像检测、识别与处理中有着举足轻重的地位。边缘信息不仅影响到计算机对整个图像背景信息的识别与整合,更是后续图像分割所依赖的前提与基础。因此,合理有效的算法选择将影响到整个计算机视觉检测定位工作台的工作效益。Canny算子是重要的边缘检测算子,是最优的阶梯型边缘(step edge)检测算子,本文将其运用到等离子显示器的定位当中,得到了良好的试验效果。实验结果表明,运用直方图均衡化以及Canny算子对等离子显示器的上下基板以及荫罩板进行图像处理可以有效的检测出较为清晰的图像边缘,得到三块板子间较为清晰的相对位置。
1 计算机视觉定位技术
东南大学自主研发的荫罩式等离子显示器(SMPDP)的前、后基板以及荫罩之间的相对位置关系如图1所示。前基板上布有水平的电极线,后基板上布有垂直的电极线,垂直电极线宽度为水平电极线的两倍,宽为120um,荫罩板上布有圆形网孔,等离子显示器的生产工艺要求前后基板电极线两两正交,其交点与荫罩板的网孔中心重合。然而实际生产过程中难以通过肉眼对其进行分辨,因此需要利用相关的视觉检测系统对其进行精密定位。
整个控制系统以工业控制计算机为中心,包括视觉传感器、高速视频采集卡和专用的图像处理设备等多个关键模块。视觉传感器采用的是4组同等型号大小的CCD摄像头用于拍摄三板最初相对位置。得到原始图像之后,在放大镜头的辅助下对图像进行平滑、去噪、边缘检测,使得图像特征变得明显,为后续的进一步定位作铺垫。
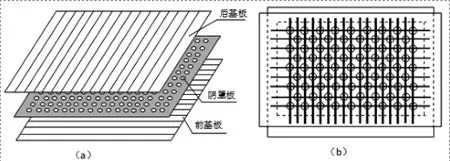
图1 SMPDP前后基板与荫罩的相对位置
2 Canny算子实现原理及步骤检测
2.1 Canny算子原理及优越性
Canny算子实现图像处理的原理是在提高目标图像边缘敏感度的同时,可以有效地抑制不相干的外部干扰,如噪声等。其本质是对图像中边缘信号进行极大值检测从而筛选出目标物体真实的边缘像素点。从以下三个标准来说,最适合利用Canny边缘检测算子进行图像检测的信号为当图像受到白噪声影响时的阶跃型边缘。
(1)检测标准。
不流失图像最重要的边缘像素点,不能误检出虚假的边缘像素点,评判参数信噪比SNR应尽可能大。
(2)定位标准。
图像真实边缘和Canny算法检测到的边缘相对位置偏差尽可能的小。定位精度越高越好。
(3)单响应标准。
若系统输入存在多个响应,将其降低至单个边缘响应,即单响应输入。
2.2 算法步骤
利用Canny算子进行图像处理以及检测的主要步骤可以分为以下四点:滤波、增强、检测、定位。具体实现步骤如下:
(1)利用2D高斯滤波模板和目标图像进行卷积,消除原始图像中的噪声信号。本实验中系统选取的是方差为1的滤波模板,高斯平滑函数可以表示为:

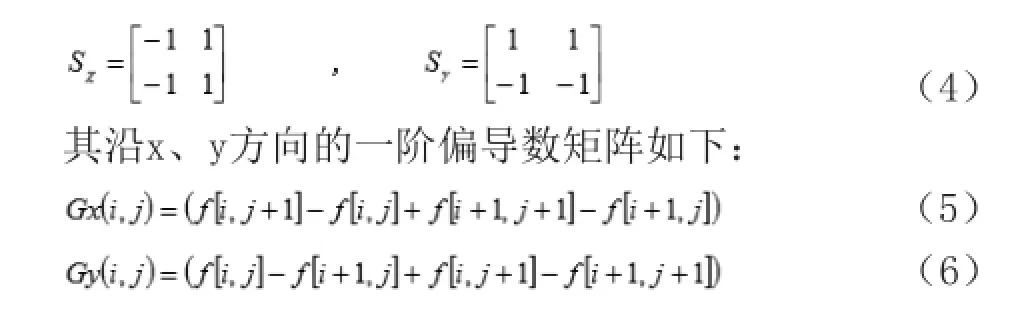
(2)利用导数算子(如Prewitt算子等)分别找出原始待测图像像素灰度沿着水平、垂直两个方向上的导数,进而计算得到对应的梯度值:。本实验中选取的卷积算子为:

(4)在求出了图像边缘的条件下,将其梯度方向分成4等分,分别为,进而能够找出本像素梯度方向上的邻接像素。
(5)在求出了像素梯度大小及方向之后,对梯度的模实现非极大抑制。读入图像,分别比较某点的像素灰度值与其前后两个梯度方向上的像素灰度值,若该点的灰度值不是三者中的最大值,即判定该点为待测物体中的非边缘点,同时将其像素值置0。
(6)使用双阈值算法进行进一步检测并且连接像素的边缘。凡是比高阈值大的像素点必然为真实边缘点,而低于低阈值的像素点则一定是非边缘点,若像素点的梯度值处于高阈值、低阈值之间,则进一步判断在该像素点的所有邻接像素中有无大于高阈值的边缘像素点,如果存在这样的像素点,即将其判定为目标物体的真实边缘点,否则,即为非边缘点。Canny算子检测的流程图如图2所示。
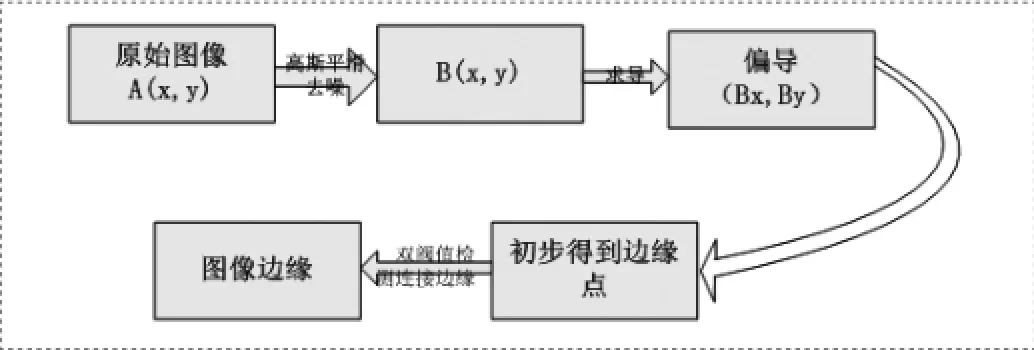
图2 Ganny检测算子流程图
3 实验及仿真
3.1 直方图均衡化
在利用Canny算法对图像进行处理之前,首先需要对图像进行先行的去噪,噪声源主要是在CCD摄像头拍摄过程中的光线抖动引起的误差。直方图均衡化是利用累计函数对原始图像中各个像素灰度值进行新一轮分配整合,最终使得图像对比度得到增强。其算法计算步骤如下:

(5)重复步骤2,统计映射后的灰各个度级所占像素个数。
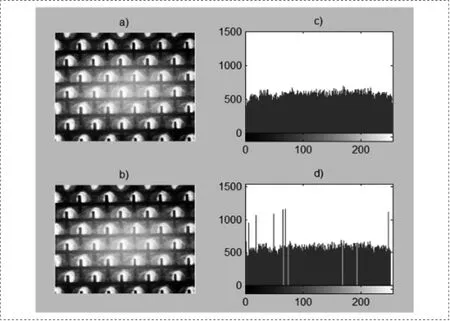
图3 图像直方图均衡化前后比较注:a)原始灰度图像图像均衡前;b)原始灰度图像均衡后;c)原始灰度图像均衡前直方图;d)原始灰度图像均衡后直方图。
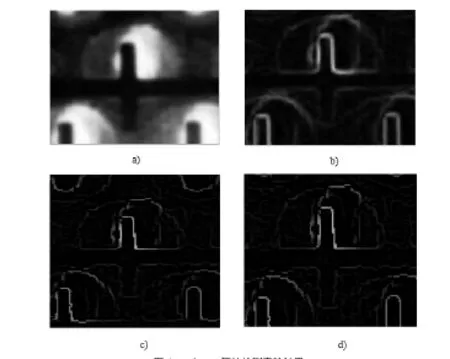
图4 Canny算法检测实验结果注:a)高斯去噪平滑;b)梯度检测;c)非极大抑制;d)双阈值分割。
根据上述算法阐述的六个步骤对计算机收集到的初始目标图像进行直方图均衡化。由于本实验收集到的图像是三个板子的相对位置图,其大小是在三维空间内,因此首先对图像进行三维变二维的仿真,即进行灰度变换。灰度变换后直方图均衡化前的图像灰度图和直方图的分布如图3a)、c)所示,直方图均衡化后的灰度图及其直方图的分布如图3b)、d)所示。
从图3中可以看出,均衡前的灰度图其直方图分布相对较为密集,图像与背景的区分度不是很明显,而经直方图均衡化之后,对比度得到了明显地提高,背景与图像部分分辨率更高,然而由于灰度平均的原因,不可避免的使得原有图像中的某些部分变得模糊,而且灰度级部分减少,原图里一些存在高峰的区域经均衡化后对比度不自然地过度增强。因此,本文采用Canny算法就可以将图像进一步的去噪,使得图片的一些细节更容易被捕捉。
3.2 Canny边缘检测
根据Canny边缘检测的步骤进行MATLAB编程及仿真,对等离子显示器的前后基板以及荫罩板的相对位置图像进行滤波、非极大抑制、双阈值分割等处理,每一步的运算结果如图4(a)-(d)所示。
从图4中可以看出经过四个步骤的检测之后,图像的边缘被清晰的描述出来,并且不存在伪边缘,几乎可以检测出较为完整连续且细致的边缘。三板之间的相对位置得以大致确认,为进一步的精密定位作了铺垫。
4 结束语
在MATLAB软件仿真实验的验证下,证实了Canny算子的优越性,可以在噪声抑制以及图像平滑、边缘检测方面实现一定的平衡,适用于计算机视觉检测系统。然而仍然存在一些不足,比如说双阈值的取值问题。阈值选取过大,抑制的效果越明显,但计算量大大增加,阈值选取偏小,则会丢失相关细节,对定位精度造成影响。因此,在下一步的研究目标中,应该主要将Canny算子作为边缘检测的基础,而辅以利用其他算法对其进行进一步的改进优化。
[1]范媛媛,桑英军,沈湘衡.基于BP神经网络的图像质量评价参数优化[J].应用光学,2012,32(6):1150-1155.
[2]王纪刚,陈家新.基于改进滤波的Canny医学图像边缘检测算法[J].计算机测量与控制,2013(6):1577-1579+1593.
[3]唐继勇.基于边缘保持滤波的Canny彩色图像边缘检测方法[J].现代电子技术,2012(11):81-83+87.
[4]邹霁.大尺寸超高清晰度等离子显示器的研发及运用[J].电视技术,2012(20):56-60.
[5]余凤斌,李斌,于名讯.等离子显示器用滤光膜的研制[J].电子元件与材料,2011(11):58-60.
[6]王桂花.银盐方式等离子显示器(PDP)用电磁波屏蔽膜的开发[J]. 影像技术,2008(3):10-13.
[7]常靓,陈志国.Matlab在图像处理教学中的应用[J].黑龙江科技信息,2008(26):78.
[8]宋涛,樊志新.用于铜扁线表面质量检测的计算机视觉和图像处理技术[J].中国科技信息,2005(22):42.
[9]闫伟,金元郁.图像处理在位置控制实验系统中的应用[J].工业控制计算机,2005(2):18-19.
[10]孙丽云,焦向东,刘丹,等.一种新的图像处理实验设计方法[J]. 舰船电子工程,2008(12):110-113.
