基于长链状传感网的智慧路灯控制系统
2015-02-02资双飞林炜岚
资双飞,林炜岚
(1.广州中国科学院沈阳自动化研究所分所,广东 广州 511458;2.中国科学院沈阳自动化研究所,辽宁 沈阳 110016)
引言
近年来,路灯控制由传统的通电开关控制方式,逐渐演变成使用通信系统进行智能控制的方式。通过使用智能控制,可以有效地降低路灯的能耗,及时发现系统故障,实现快速维护。
目前我国的智慧路灯照明控制系统,主要有两种控制方式:一种是电力线载波通信(PLC)方式;另一种是ZigBee无线通信方式。电力线载波通信是使用电力线作为载波信号的传输媒介,具有节省通信线路的优点[1-4]。但是,在低压电压载波通信中,电力载波控制易受电力线强磁场干扰,导致信号衰减强、实时响应慢[5]。再者,电力线载波通信对于无电力线的新能源路灯,如太阳能路灯、风能路灯等无法执行监控。ZigBee是一种新兴的无线短距离通信技术,具有自配置、自愈合、抗干扰的优点,同时具有很强的系统可靠性和网络健壮性。然而,由于路灯照明系统应用规模大的特性,使ZigBee通信方式容易导致网络开销大[6-8],出现网络堵塞,从而影响路灯照明系统的实时响应性和可靠性。
从实际应用环境上讲,路灯处于一个大规模带状区域,一般的网络拓扑结构难以胜任,应当使用一种符合该特征的拓扑结构进行通信,长链状无线传感器网络最为适合。
目前,国内外对于带状网络协议的研究比较多,主要是采用聚簇的路由协议方式,研究带状网络的能耗问题[9-12]。但是,在路灯照明控制系统中,一般节点的数量比较多,同时各路灯节点中的基本信息量也比较大,所以聚簇路由协议中关于数据融合的方法[13],在路灯照明控制系统中已起不到明显的作用。同时,相对于路灯灯泡的功率,无线模块的能耗也已不是主要问题,而整个网络的可靠性、实时性和健壮性成了目前路灯照明控制系统的主要研究内容。
本文提出了一种基于长链状传感网的智慧路灯系统。在本系统中,采用了自适应可变路由半径动态路由方式,解决了室外环境对无线传感网络的通信干扰,并增强了系统的健壮性;同时,针对网络中的隐藏终端问题,本系统采用了时间同步的解决方案。在此基础上,对本路灯照明控制系统进行了室外100个节点(1.5km道路)测试,其所有节点的回复应答时间在70s内完成;同时所有节点控制的正确率在99%以上。
1 系统模型
1.1 业务模型
智慧路灯控制系统,主要是对路灯进行合理的开关控制,及路灯基本信息的采集;同时还必须具备路灯故障检测的功能。
由于业务需求,本文设计的智慧路灯控制系统不仅具有开关控制功能和故障报警功能,而且还具有亮度调节和用电查询等功能,同时还必须在以下通信模式下执行这些功能。
1)广播模式。在路灯控制系统中,通过监控中心可以广播控制整个路灯系统中所有路灯节点的开关状态、亮度调节、电表查询等。
2)组播模式。在路灯控制系统中,可以将整个路灯系统中所有的路灯节点进行分组控制,并通过监控中心对路灯系统中某同一组路灯节点进行控制。
3)点播模式。可以对路灯系统中的某一路灯节点进行单独控制。
4)报警模式。在路灯控制系统中,如果某个路灯节点出现了欠载(如灯泡坏了)、过载(电压或电流过高)或别的故障时,故障节点将会主动向监控中心发送故障信息,并在监控中心的界面上显示相应的报警。
本路灯控制系统在满足以上业务模型的基本上,同时还要求满足高稳定性、高可靠性、强健壮性及快速响应性。
1.2 网络模型
为了实现以上的业务模型,本文采用长链状传感网拟解决集中控制器与各路灯节点之间的通信问题。为方便分析长链状传感网在路灯照明系统上的应用,本文以道路旁的路灯实例为模型,建立一个长链状网络,其网络模型如图1所示。
模型中包括两种节点类型,分别为数据汇聚节点和传感器节点。它们是一对多的关系,其中,传感器节点的数目范围是[1,+∞);汇聚点处于长链状网络的一端,所有的无线传感器节点安装在路灯上,全部部署在一个L×D(其中,L≥D)的长方形区域内,并呈长链状向另一端延伸;其中每个无线传感器节点具有相同的计算和通信能力,且具有全网唯一的UID;汇聚点的计算能力不做限制。所有节点的通信都在同一信道中,汇聚点可以通过广播、组播或点播的形式向无线传感器节点传输数据。
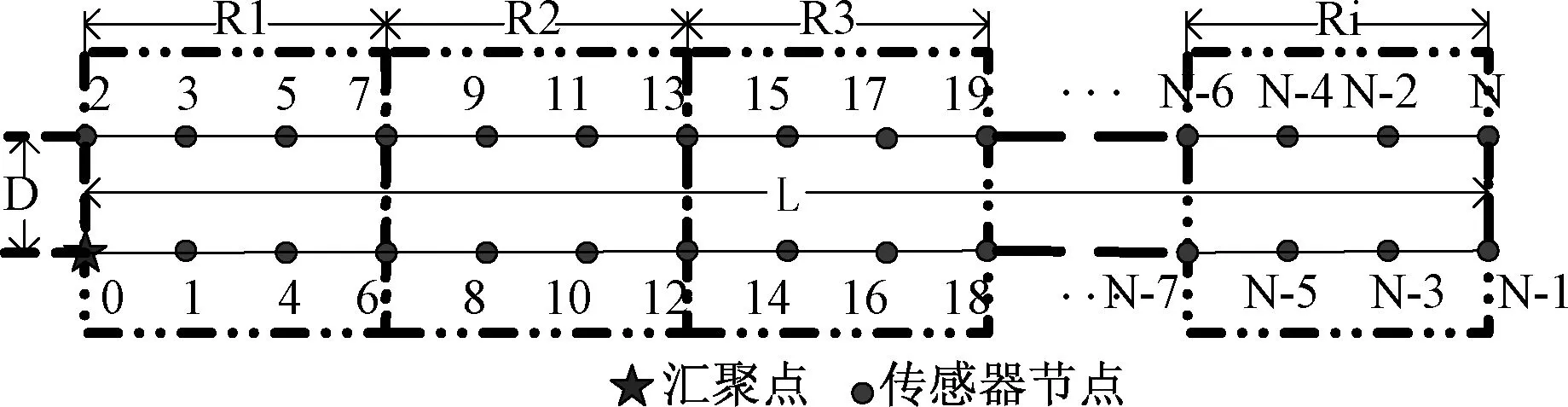
图1 带状网络模型Fig.1 Long chain network model
2 系统方案
本方案采用无线传感网络技术与GPRS通讯技术相结合的方式,实现路灯系统的远程监控。总系统架构主要由监控中心、集中控制器和无线路灯节点控制器三部分组成,如图2所示。

图2 路灯控制系统架构图Fig.2 Street light control system structure chart
集中控制器与多个无线路灯节点控制器按照长链状网络协议,实现相互之间的稳定通信;再由集中控制器通过GPRS网络与监控中心进行信息交流,就这样,路灯控制系统的双向通信链路就此形成。监控中心可以发送控制或查询指令至长链状无线传感器网络,对单个或整条路灯进行控制和查询,同时路灯节点的故障信息也会通过长链状无线传感器网络传输至监控中心。
3 路灯控制器设计
路灯控制器包括路灯集中控制器和无线路灯节点控制器。无线路灯节点控制器作为无线传感网的一个单元,多个无线路灯节点控制器与路灯集中控制器相互协调工作,构成长链状无线传感网。
路灯集中控制器主要是实现无线传感网与GPRS间数据交换;而无线路灯节点控制器不仅要控制路灯,还要处理整个无线传感网的协调问题。因此,无线路灯节点控制器设计是本系统的一个关键。
无线路灯节点控制器包括路灯控制功能和无线通信功能,总设计分为硬件设计和软件设计。
3.1 无线路灯节点控制器硬件设计
无线路灯节点控制器是采用IM无线模块而设计的。IM无线模块是由广州中国科学院沈阳自动化研究所分所自主研发的一款无线模块,是基于STM32F103C8T6和SI4432设计的低成本、低功耗、远距离的无线物联网传感模块,其发射功率可以达到20dBm,并且拥有丰富的外部接口,可满足路灯节点控制器外部电路控制的需求。在本系统中,IM无线模块的射频数据传输速率为250kbps。
其中,STM32F103C8T6是意法半导体(ST)公司推出的基于Cortex-M3内核的32位ARM微控制器,20KB的RAM,64KB的FLASH。 SI4432是Silicon Labs公司出厂的一款低于1GHz高性能射频收发器,SI4432输出功率可达+20dBm,接收灵敏度达到-121dBm,可提供对数据缓冲FIFO、数据包处理、接收信号强度指示(RSSI)、空闲信道评估(CCA)、唤醒定时器、低电压检测、温度传感器、8位AD转换器和通用输入/输出口等功能的硬件支持。
无线路灯节点控制器主要由自检测量模块、电源模块、开关模块、功率调节模块、保护模块、IM无线模块组成。无线路灯节点控制器的体系结构,如图3所示。
自检测量模块主要用于采集路灯节点自身的电参数,以判断节点是否处于正常状态。开关模块是通过控制继电器的开关以实现路灯的亮与灭。功率调节模块能根据微控制器给出的控制信号调节路灯的亮度,主要用于LED路灯上调节。电源模块是将路灯上的电压转换成路灯节点控制器所需直流电压,供控制器正常工作。保护模块能在过压过流时保护路灯节点控制器,尤其是雷击浪涌保护。IM无线模块不仅为整个节点控制器提供通信功能,同时还作为整个无线路灯节点控制器的中央处理器,实现路灯节点控制器全部外围电路的控制。

图3 无线路灯节点控制器的体系结构图Fig.3 Wireless street lamp node controller structure chart
3.2 无线路灯节点控制器软件设计
无线路灯节点控制器的控制程序主要分为三个部分:管理层、通信部分和应用层。其相互间的关系如图4所示。

图4 无线路灯节点控制器软件结构图Fig.4 Wireless street lamp node controller software structure chart
管理层主要负责整个协议的运行和维护,状态的维护和转换;通信部分包括物理层,数据链路层和网络层,实现射频通信、路由选择和点到点通信,同时通信部分还负责串口通信;应用层负责网络的配置和组建,以及具体路灯控制应用。
依据图3的体系结构和路灯控制系统的业务模型,无线路灯节点控制器软件主要执行两部分功能:一是接收无线传感网指令,做出相应的控制并回复应答;另一是定时自身参数的检查,判断是否发生故障。其应用层程序流程图如图5所示。

图5 无线路灯控制部分处理流程图Fig.5 Wireless street lamp control flow chart
4 路由协议
由业务模型可知,本路灯控制系统中路灯节点主要是采用被动的方式与监控中心进行数据通信。在路灯照明系统中,控制指令都是由监控中心下发给集中控制器,再由集中控制器向长链状无线传感器网络中的路灯节点控制器发送控制指令;无线路灯节点控制器将被动给出相应的应答,只要当路灯节点发生故障时,才会主动上传故障信息。在基于长链状传感网的智慧路灯系统设计中,由于其特殊性,在进行长链状网络协议设计时需要解决以下几个问题。
1)长链状网络协议如何实现快速响应?在无线智慧路灯系统中,网络中的响应时间会随着路灯节点数的增加而增长。要实现节点的快速响应,可以采用最大的路由半径通信,以减少整条长链状网络中的传输跳数。但是外界环境的变化,对无线传感器网络的通信距离影响比较大,这就需要一种自适应可变半径的动态路由。
2)长链状网络协议如何在可变半径动态路由中让所有节点知道网络的通信路径?大部分长链状网络协议都是通过广播的方式通知所有节点的固定路由地址,并确定通信路径[9-12]。但是对于可变半径动态路由,这种方式难以实现。这就需要通过某种方式让所有传感网节点知道自身在传感网中所处位置。
3)无线带状网络中的隐藏终端问题如何解决?在前文中提到长链状传感网智慧路灯系统的网络模型呈长链状型,在实际工作中,由于整条网络中存在环境差异,可能导致路灯系统在广播模式时,由于大量数据传输,出现隐藏终端问题。如图6所示,当节点B正在向节点A发送数据时,由于环境的影响,节点C无法感知节点AB之间的通信,此时节点C也向节点A发送数据,将会在节点A处产生碰撞,从而产生隐藏终端的问题。虽然RTS/CTS机制能够解决隐藏终端问题,但在路灯控制系统中,采用RTS/CTS开销比较大,不宜采用,因此我们在设计长链状传感网的智慧路灯系统时,采用开销较小的时间同步方案来避免隐藏终端问题的出现。
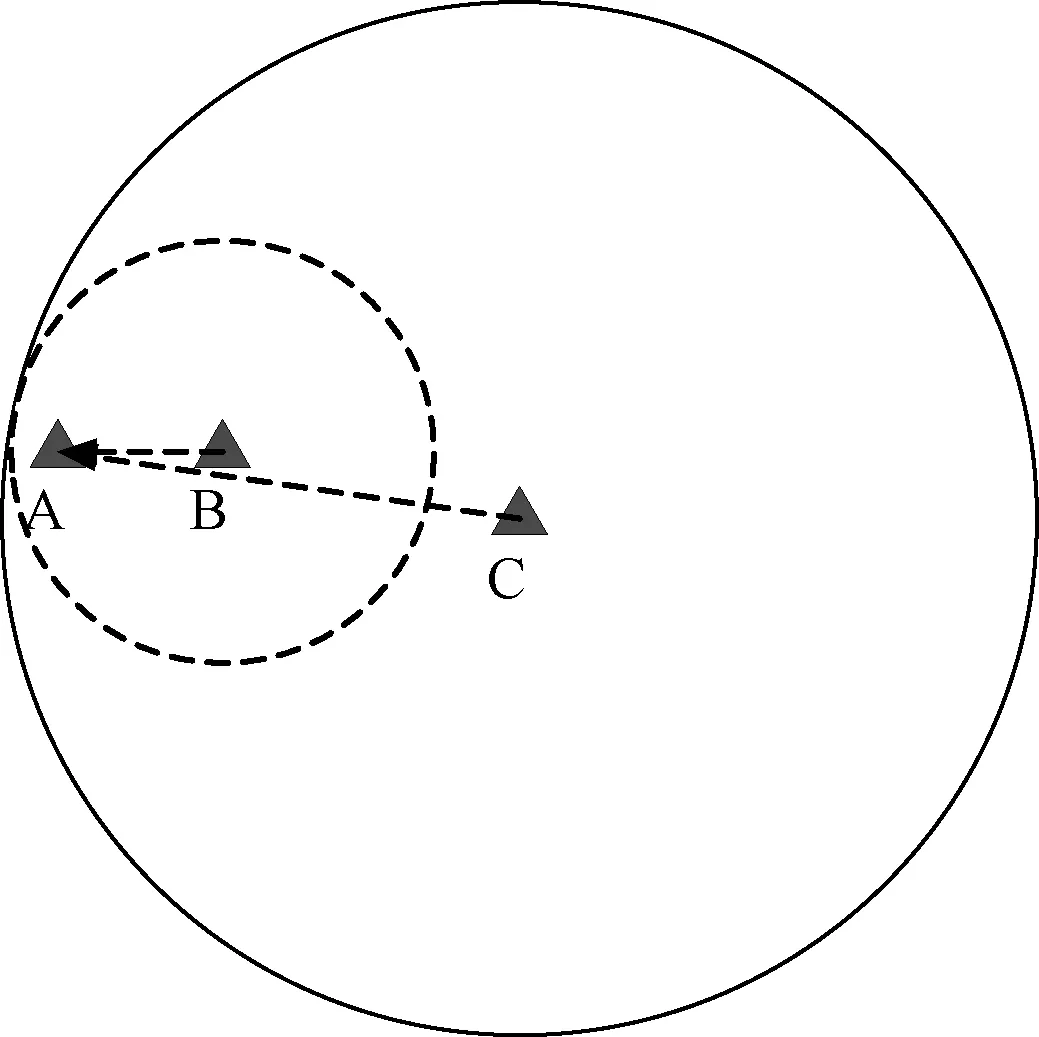
图6 带状网络中的隐藏终端问题Fig.6 The hidden terminal problem of long chain network
为了解决上述几个问题,在网络使用前,先进行节点入网配置,为网络中每个节点按到汇聚点距离的远近分配一个短地址,让网络中所有节点知道自身所处在网络中的位置,方便动态路由的选择和数据通信。在数据传输过程中,路由半径是随着通信距离实时变化的,总趋向于最大路由半径,以减少网络中的跳数,提高响应速度。同时,网络协议中还采用了时间同步的方式避免隐藏终端。
4.1 入网配置
入网配置是由集中控制器从近到远,依次为网络中所有无线传感器节点分配组号和短地址ID。组号为组播控制的标志,由用户确定分组情况,在组播模式控制下,同一组号的节点为同一组;入网配置的短地址由无线传感器节点到汇聚节点之间的距离决定,距离汇聚节点最近的无线传感器节点配置短地址为0×0001,距离第二近的无线传感器节点配置短地址为0×0002,以此类推。
假设汇聚节点的最大路由半径为R1,如图1所示汇聚节点最远可以点对点入网配置的无线传感器节点是6号节点,当汇聚节点要配置7号节点时,直接点对点的配置不成功,汇聚节点会选择6号节点作为中继路由节点,通过6号节点转发入网配置信息给7号节点。以此类推,汇聚节点会以多跳的方式为整个网络的无线传感器节点分配短地址ID。在之后的所有通信中,都以入网配置的短地址作为整条网络上的通信地址。
所述汇聚节点在网络中的短地址为0×0000,由于各路灯节点间的距离基本相等,所以各节点之间的通信距离可近似的使用二者之间的地址差来表示,定义为路由半径R。网络中的节点就可以通过短地址而知道自身所处在网络中的位置。
4.2 路由建立
为了说明本路由协议,从智慧路灯系统业务模型的几种通信模式进行分析说明。整个协议的网络层格式,如表1所示。

表1 网络层帧格式Table 1 Network layer frame format
其中:帧序号FN,由信号发起者填入,表明该帧的唯一性;源地址Ds,信号发起者的短地址ID;目标地址Dd,最终需要接收该信息的节点短地址ID,可以为所有节点(广播模式)、某一具体节点(点播模式)或某一组节点(组播模式);路由半径R,提供给接收到广播信息的节点用来计算是否自己为下一跳广播的发起者,为广播通信半径范围内的无线路灯节点控制器数;载荷,网络层载荷,包括应用层要传输的数据。
4.2.1 广播模式和组播模式
广播模式和组播模式的通信原理一样,都是以广播的形式进行数据传输,只不过组播模式在接收到的广播数据上,增加了组号的识别,在此以广播模式为例进行长链状传感网路由协议分析。
广播模式下,由监控中心发起控制指令,通过集中控制器设备以广播的形式将指令发送到各个节点设备,无线传感网中的所有节点收到广播指令后,都会给出相应的应答。
在上述的入网配置中,汇聚节点将会得到一个当前环境其最大的通信路由半径R作为整个网络的起始路由半径。路由半径R在整个网络的传输过程中将会随着通信能力动态调整。
无线传感网中的节点在收到广播数据包信息后,如果节点自身的短地址D大于源地址Ds与路由半径R之和,则将接收到的数据丢弃;而在这一路由半径R内的所有节点,则以收到广播的时刻为一个同步的基准,进行时间同步计时。无线传感网节点同步后的时隙分布图如图7所示。
时间同步完成后,先预留一段时间给无线路灯节点控制器响应;然后生成R个应答时隙;最后,根据网络层帧数据中的节点自身的短地址D和源地址Ds,通过公式(1)计算出路由半径R内所有节点的回复应答时隙序号Nt,从而可以避免数据冲突。
Nt=R+Ds-D+1
(1)
其中:Nt为节点回复应答的时隙序号;R为路由半径;Ds为源地址;D为节点地址。
同样,在传感器节点同步后的时隙分布图中,还有一段监听广播时隙,主要是为了监听并确定新的中继路由节点DR。
监听时隙首先监听(D=R+Ds)节点的广播数据,如果没有监听到该节点的广播指令,则选择(D=R+Ds-1)节点作为中继路由下发广播指令,以此类推,确定下一跳路由DR。直到监听到广播或监听广播时隙完成,时钟同步将结束。
监听广播时隙序号N1的取值与发送应答时隙序号Nt公式一样,如公式(2)所示。
N1=R+Ds-D+1
(2)
其中:N1为节点监听广播的时隙序号;R为路由半径;Ds为源地址;D为节点地址。
监听广播期结束后,原广播节点中的路由半径R的值将修改。其修改公式如公式(3)所示。
(3)
其中:R为路由半径;DR为中继路由节点地址;DS为源地址。
若监听到的是(D=R+Ds)节点的广播,则新的路由半径为原路由半径加上K的值。否则,新的路由半径R取新的中继路由节点短地址DR与网络层源地址Ds的减值。
其中,新路由发送的广播帧中的源地址将变成自身的短地址DR,同时新的广播帧的路由半径R也按着公式(3)调节,而目标地址和载荷部分不变。

图7 传感器节点同步后的时隙分布图Fig.7 After the synchronization time slot diagram of the sensor nodes
每个节点收到广播后会在发送应答时隙中发送一个端到端应答。如果汇聚节点在该节点的传输范围内,则应答帧的网络层目标地址为汇聚节点;若汇聚点在传输范围外,协议将选择最远可以通信的节点,作为中继转发数据,即应答帧的网络层目标地址Dd为其节点自身短地址D减去路由半径R的值。该中继节点收到信息后,需要马上回复一个点到点应答。若节点与中继通信不成功,协议将会按一定的比例关系缩小路由半径R的值,重新选择中继节点。每个节点有三次发送机会。节点发送应答的时隙如图8所示。
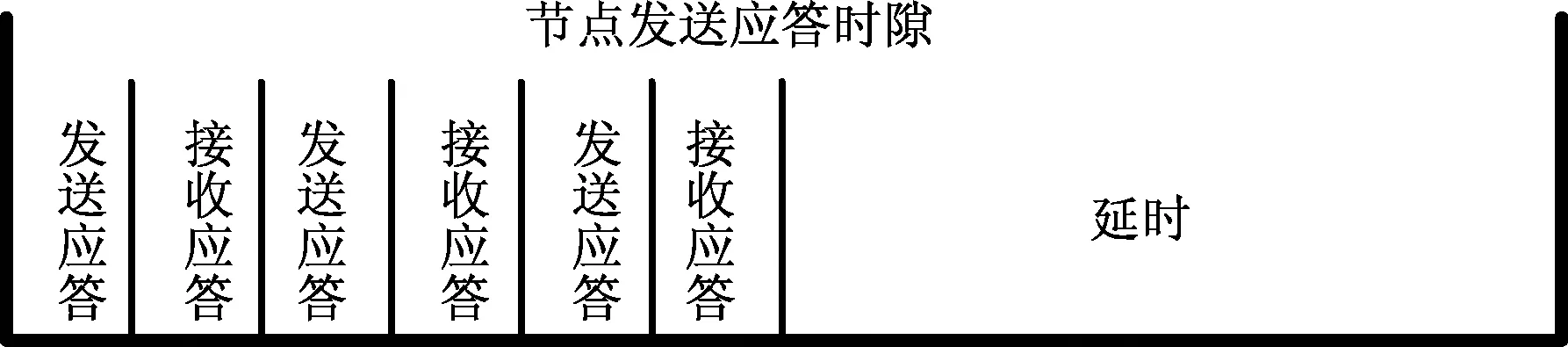
图8 节点发送应答时隙Fig.8 Node sends response time slot
目标地址节点在回复点到点应答后,以相同方式计算下一跳地址,并马上将该数据包向它的下一跳传送,直到该端到端应答包传送到汇聚节点。
在同一信道中,为了防止节点间相互信息的干扰,节点在发送应答时隙中加入延时段,为下一个相邻节点应答时隙的数据通信做一个隔离。延时结束后,相邻节点才开始发送应答帧,此时,上一节点的应答帧在长链状网络上已经传送到足够远的距离,与当前节点相差至少一个最大路由半径R。这样在同一条网络中有可能同时存在多个信息在传输,并相互之间不会产生信号冲突。
4.2.2 点播模式和主动上传模式
点播模式与主动上传模式的通信方式基本相同,点播模式是由汇聚点主动向网络中某一个节点发送指令,并收到节点的相应应答;主动上传模式是网络中的某一节点由于故障主动向汇聚点发送报警信息。简而言之,主动上传模式比点播模式少了一个汇聚点向节点下发指令动作。在此以点播模式为例,说明这两种通信模式的实现。
在点播模式和主动上传模式中,整条网络属于空闲时期,一般只有一个信号在网络中传输,所以这种情况不用考虑大量数据在网络中传输时易发生碰撞,而引起隐藏终端的现象,相对于广播模式,点播模式不需要时间同步方式,而只采用点到点传输方式,其中路由选择还是采用变路由半径动态路由方式,每个传输数据的节点都尽量选择其最远传输距离的节点作为路由,以提高响应速度。
首先,汇聚点向网络中的某节点点播数据,假设汇聚点的路由半径为R1,而目标地址不在R1内,则上级路由将会将数据传输给下一级路由转发。如果上级路由没有收到下级路由的点到点应答,则上级路由会另外选择一个较近的节点作为下一级路由;否则,下级路由将转发点播数据。
假设目标地址在当前路由半径内,则上级路由直接将数据传输给目标节点,并等待点到点的应答,如果收到了点到点的应答,则数据下行点播成功;否则,上级路由将会在本身地址到目标地址的中间再选择一个节点作为下一级路由,数据将由下一级路由转发。
目标节点收到点播数据后,将回复相应的应答信息给汇聚点。数据回复过程中也是采用点到点传输的方式,每个向上传输数据的节点都尽量选择其最远传输距离的节点作为路由,向汇聚节点发送数据。
4.3 路由维护
一般的长链状拓扑结构,主要采用的是聚簇的路由协议方式[13-15],数据是分簇处理的,每一簇内的簇首都是事先选择好的,如果某一簇首节点由于某种原因不能工作,簇内节点可能会断开,将影响整个网络的健壮性和扩展性。
但本带状网络协议则有很强的健壮性和扩展性。如图9所示,假设路由节点6由于某种原因不再具有路由中继的功能,节点6以前的节点将发现路由节点6无法将数据传送至下一级路由节点,为了维护网络的连通性,节点6之前的节点,按地址从大到小,由节点6的邻居节点5来做路由,以续传路由节点6的数据包。

图9 网络故障时路由的维护Fig.9 A failure in the network routing maintemance
鉴于路灯系统中长链状拓扑结构的特殊性,数据报文在找到目的节点后,如“接力”的方式传输,并回复点到点的应答。发送数据包时,如果不能收到下一跳节点的应答包,则重传,仍然没有收到应答,即认为下一跳路由发生了故障,协议将会选择下一跳路由节点的邻居节点作为新的路由。
5 测试及应用效果
在以上基于长链状传感网的智慧路灯系统基础上,通过1个集中控制器对100个无线路灯节点控制器进行了室外测试。为了尽量模拟路灯的实际情况,室外测试是在广州工业技术研究院旁的海滨路上进行。100个节点的安装是从广州工业技术研究院南门海滨路开始,沿着海滨路两边的路灯向西逐个安装。如图10所示,安装道路总长1.5km,并呈带状型,每个节点设备都安装了外部天线,并安装在路边的路灯上,高度大概2.5m左右。集中控制器安装在长链状网络的开始端——广州中国科学院沈阳自动化研究所分所物联网研发中心内。

图10 路灯节点控制器室外测试安装图Fig.10 Street lamp node controller outdoor test installation drawing
测试过程中,在广播模式下,对100个路灯节点控制器经过了800次开关灯测试。其丢包率的测试结果如图11所示。

图11 室外100节点800次广播模式测试结果Fig.11 The results of model test for 100 nodes in outdoor broadcast 800 times
从图11中可知,100个路灯节点控制器在室外进行800次的广播模式测试,其总的丢包率在1%以内,超过半数的节点没有丢包。通过重传机制或者降低IM无线模块的射频数据传输速率可以使丢包率进一步降低。
通过上位机测试软件统计,100个路灯节点规模下,800次广播测试平均响应时间为67.5s(其中包括路灯开关处理时间在内,响应时间为双向数据通信时间)。在此基础上,还分别在10、20、50和100个路灯节点的规模下,对本无线路灯控制系统与广州中国科学院软件应用技术研究所现有的PLC路灯控制系统进行了响应时间对比实验。测试结果如图12所示。PLC路灯控制系统在100个路灯节点的规模下,响应时间长达约300s,而本无线路灯系统响应时间在70s以内,远小于PLC路灯控制系统的响应时间。
而ZigBee通信方式的路灯控制系统规模一般都比较小,如蒋建平[16]只对5个节点设备和1个网络协调器组成的网络进行测试,其中每个节点的组网时间约为1.5s;刘玉良[17]的测试规模为50个路灯节点,但是被平均分成了5组,即只有10个节点的规模,其双向数据传输响应时间为10~12s,而本无线路灯控制系统10个节点的响应时间仅为3s;王东东[18]的响应时间更慢,单个节点组网用时20s。
以上测试结果表明,本智慧路灯控制系统相对PLC通信方式和ZigBee通信方式,实时性有很大的提高,同时解决了目前ZigBee路灯控制系统规模小的问题,达到实时可靠的路灯控制系统。

图12 PLC路灯控制系统与长链状无线路灯控制系统响应时间对比图Fig.12 Response time contrast of PLC street lamp control system with long chain of wireless street lamp control system
6 结束语
本文首先分析了目前国内外常用于路灯控制系统的通信方式,为了提高现有路灯控制系统的服务需求,在此基础上提出了一种长链状传感网的智慧路灯控制系统。通过使用自适应可变半径动态路由通信协议及时间同步等关键技术,解决了目前路灯控制系统中的响应时间长和规模小的问题。实际的测试实验,也验证了该系统的可靠性和实际应用价值。
接下来的工作,将从网络的规模和稳定性出发,优化路由协议,在增加网络规模的同时减少网络的丢包率。此外,还将研究针对分叉道路路灯控制的解决方案。
[1] Newbury J. Communication requirements and standards for low voltage mains signaling [J]. IEEE transactions on power delivery, 1998, 13(1): 46-52.
[2] Armstrong D S, Halse N J, Moore P M, et al. Method and apparatus for signal coupling at medium voltage in a power line carrier communications system: U.S. Patent 5856776[P]. 1999-1-5.
[3] Pavlidou N, Vinck A J H, Yazdani J, et al. Power line communications: state of the art and future trends [J]. IEEE Communications Magazine, 2003, 41(4): 34-40.
[4] Liu H, Bao-hui Z. The couple technology of distribution high-speed carrier communication[C]//Power System Technology, 2002. Proceedings. PowerCon 2002. International Conference on. IEEE, 2002, 2: 1312-1315.
[5] 刘柱, 汪晓岩, 蔡世龙. 低压电力线载波通信组网方法[J]. 电力系统通信, 2009, 30(206): 17-30.
[6] 孙利民. 无线传感器网络[M]. 北京: 清华大学出版社, 2005.
[7] 林方键, 胥布工. 基于ZigBee网络的路灯节能控制系统[J]. 控制工程, 2009, 16(3): 324-326.
[8] 徐艳, 王茜, 武剑. ZigBee 路由协议优化仿真研究[J]. 计算机仿真, 2013, 30(6): 292-295.
[9] 吴明娟, 黄河清, 沈杰,等. 分簇式无线带状传感网负载均衡路由协议[J]. 华中科技大学学报, 2010,38(9): 63-67.
[10] 吴华君, 张自力, 李卫. 一种适用于煤矿井下无线传感网的能量均衡路由协议[J]. 计算机科学, 2011, 38(4): 145-150.
[11] 刘国梅, 金秋春, 史军勇. 一种适合长距离带状无线传感器网络的路由协议[J]. 科学技术与工程, 2013, 13(6): 1661-1665.
[12] 李成法, 陈贵海, 叶懋,等. 一种基于非均匀分簇的无线传感器网络路由协议[J]. 计算机学报, 2007, 30(1): 27-36.
[13] 杨融, 田梦君, 杨宁,等. 基于带状无线传感器网络的一种单路径路由算法[J]. 中国制造业信息化, 2011.4, 40(7): 44-50.
[14] 洪榛, 俞立, 张贵军. 无线传感器网络自适应分布式聚簇路由协议[J]. 自动化学报, 2011, 37(10): 1197-1205.
[15] 苏国栋, 王平, 徐世武, 等. 基于模糊逻辑的无线传感网络分簇路由协议[J]. 计算机系统应用, 2013 (7): 117-121.
[16] 蒋建平, 陈辉. 基于CC2530的ZigBee无线城市路灯控制系统的设计[J]. 测控技术, 2012,31(9): 56-59.
[17] 刘玉良, 杨伟明, 张志允. 基于CC2530的无线自组网太阳能路灯控制系统[J]. 天津科技大学学报, 2014,29(1): 59-64.
[18] 王东东, 郭文成. 基于ZigBee技术的路灯无线网络控制系统设计[J]. 天津工业大学学报, 2009,28(1): 84-88.
