基于多普勒测速的单节点欺骗检测方法研究
2015-02-01姚李昊陈飞强聂俊伟欧钢
姚李昊,陈飞强,聂俊伟,欧钢
(国防科技大学电子科学与工程学院,长沙 410073)
基于多普勒测速的单节点欺骗检测方法研究
姚李昊,陈飞强,聂俊伟,欧钢
(国防科技大学电子科学与工程学院,长沙 410073)
摘要:欺骗干扰由于其功率小、隐蔽性强等优点,逐渐成为干扰卫星导航信号的重要手段。本文从理论分析、数值计算两个方面分析了基于多普勒测速检测的单节点欺骗干扰方法,并利用Neyman-Pearson方法推导出了基于多普勒测速的单节点欺骗干扰检测算法,证明了多普勒测速值在欺骗干扰情况下具有区域向单点映射的物理特性,这为后续欺骗干扰的检测算法设计提供了理论依据。
关键词:卫星导航系统;单天线;多普勒测速;欺骗检测
0引言
卫星导航信号的脆弱性使其深受各种干扰的影响,而且在“导航战”背景下,恶意干扰日益增加,欺骗干扰由于其功率小,隐蔽性强,因而越来越受到各国专家及军事部门的重视,逐渐成为干扰的重要手段,如何识别欺骗干扰,确保导航结果的正确性具有重大意义,成为卫星导航领域研究的重要课题[6]。
本文基于多普勒测速提出一种新的单节点欺骗检测方法,分别从理论分析、Matlab计算两个方面对该算法进行验证,并利用Neyman-Pearson方法推导出了基于多普勒测速的单节点欺骗干扰检测算法,该算法可以得到不同欺骗条件下的观测量阈值和检测概率的表达式,通过该表达式可以得到不同情况下检测概率的理论值,并得到理论值与接收机多普勒测速和真实速度的矢量差、虚警概率和接收机测速精度之间的变化关系图。
1多普勒测速的理论分析
在许多现代接收机中,对所接收卫星信号的多普勒频率进行处理以精确估计,从而对速度进行测量。多普勒频移的产生是因为卫星相对于用户相对运动。假设用户位置已经确定,且其离开线性化点的偏移值(Δxu,Δyu,Δzu)是在用户所要求的范围内的。由多普勒方程可得接收机天线所接收到第j号卫星的频率fRj的表示式[1,3]为

(1)

设第j号卫星所接收到信号频率的测量估计值为fj,得到的fj是有误差的,而且与fRj值差一个频偏偏移,时钟漂移误差,fj和fRj有下列关系式为

(2)
将式(2)代入式(1),且将点积用矢量分量展开,得

(3)

(4)
联系人: 姚李昊 E-mail: yaolh1990@sina.com

(5)
用矩阵算法解联立方程组以计算未知量,矩阵/矢量表示为
d=H·g,
(6)

则速度和时间漂移率的解为
g=H-1·d.
(7)
如图1所示,转发器、接收机分别置于A、B两点,当接收机受到经转发器转发的欺骗信号时,对A点的转发器进行多普勒测速,可以看出其a是从A点指向卫星的直线方向的单位矢量,设为aj2,在A点转发器处接收到的信号频率设为fj2,所以转发器处的dj可以写成

(8)

图1 多普勒测速检测欺骗示意图
转发器的测速结果满足下式

(9)

(10)
1.1接收机与转发器之间无相对运动时
当接收机与转发器之间无相对运动时,对B点的接收机进行多普勒测速,设在B点处测得的a为aj3,接收到的信号频率设为fj3,测速结果满足
(11)
由于转发器和接收机之间无相对运动,所以,在B点测得的经转发器转发的信号频率fj3等于转发器在A点处接收到的信号频率fj2,由以前的研究结论可知,在欺骗覆盖区域内,当接收机接收到的信号均为欺骗信号时,在任何点的定位结果均一致,均为转发式欺骗接收天线处的定位坐标[4],而接收机在B点处测得的a是从接收机定位的位置指向卫星的直线方向的单位矢量,即为A点指向卫星的直线方向的单位矢量,所以aj3等于aj2.比较式(10)、式(11),可以发现当接收机与转发器之间无相对运动时,接收机多普勒测速解算出的速度矢量与对转发器解算出的速度矢量一致,与接收机本身的位置坐标、运动速度无关。
1.2接收机与转发器之间有相对运动时
当接收机与转发器之间有相对运动时,设接收机相对于转发器的运动速度为Δv,接收机处接收到的信号频率为fj4,由于转发器在A点处接收到的信号频率为fj2,可以算出,
(12)
对B点的接收机进行多普勒测速,设在B点处测得的的a为aj4,考虑到式(12)并化简,可得测速结果满足

(13)

(14)


(15)
接收机与转发器之间的相对运动仅仅影响到最后漂移误差的结果。
在欺骗覆盖区域内,当接收机接收到的信号均为经转发器转发的欺骗信号时,且不论接收机相对转发器运动与否,接收机多普勒测速解算出的速度矢量均与对转发器解算出的速度矢量一致,与接收机本身的位置坐标、运动速度无关。所以,当接收机测得的速度矢量与接收机利用惯性传感器得到的本身运动速度不一致时,可以判定为受到转发式欺骗干扰,当接收机测得的速度矢量与接收机本身的运动速度一致时,判定为没受到转发式欺骗干扰。
2多普勒测速的仿真计算
对第一节建立的多普勒测速模型进行matlab计算。
仿真过程:以图1为例,取所在实验楼周边两个点的坐标作为A、B的坐标值,以(A、B)两个接收点可以接收到信号的卫星中的四颗作为卫星位置(s1、s2、s3、s4),令A作为转发式欺骗中转发器的瞬时位置,B作为欺骗干扰接收机的瞬时位置,转发式欺骗的转发器A1接收到天上卫星信号后将接收到的信号传输至接收机A2,接收机接收终端接收到卫星信号后进行多普勒测速计算,设对转发器进行多普勒测速得到的瞬时速度为V1.已知四颗卫星和A点的位置关系、卫星的运动速度,V1可由式(10)求出。接收机相对与转发器以Δv做匀速直线运动,同一时刻接收机利用惯性传感器得到的本身速度为V2.已知接收机与转发器之间的位置关系、V1和Δv,由式(14)可以得到接收机的多普勒测速值。再分别将V2、Δv和接收机多普勒测速值在(X-Y-Z)坐标系的三个坐标方向上进行分解,分别以Δvx、Δvy和Δvz为横坐标,变化范围从0到100,可得接收机本身速度V2和接收机利用多普勒测速算出的速度在X、Y、Z三个方向上的对应关系图,如图2所示。
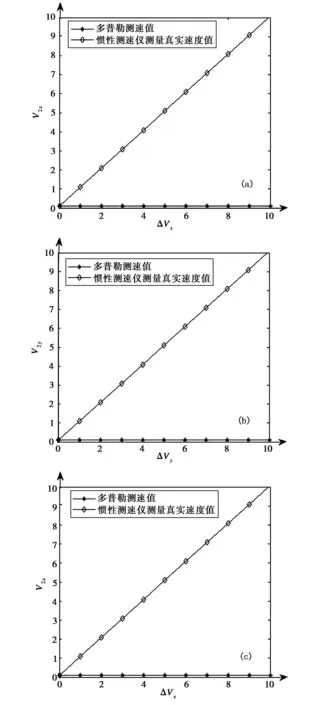
图2 多普勒测速的数值计算 (a) X方向;(b) Y方向;(c) Z方向
图中*线表示利用多普勒测速算出的接收机速度,o线表示利用惯性传感器算出的接收机本身速度,在三张图中可以看出不论接收机相对于转发器的运动速度矢量差(Δv)的大小,接收机利用多普勒测速计算出的速度三个分量分别于转发器利用多普勒测速计算出的速度三个分量相一致;当接收机相对于转发器静止时(Δv=0),接收机利用多普勒测速计算出的速度三个分量分别与利用惯性传感器算出的接收机的速度三个分量相一致;当接收机相对转发器运动时,接收机利用多普勒测速计算出的速度三个分量均与利用惯性传感器算出的接收机的速度三个分量不一致,这与1节所得到的结论是一致的。
3基于多普勒测速的欺骗检测算法
在检测实验中,由于测量误差、系统误差等的存在,实验得到的观测数据均值与理论值之间必然会存在一个误差,误差的存在使得即使在实验成功的前提下,得到的实验观测数据依然不能和理论值完全吻合,所以在得到基于多普勒测速的单节点欺骗检测方法后,依然需要建立模型得到一个观测阈值,使欺骗检测实验可以有效完成。
本节通过Neyman-Pearson方法分析单个接收机应用于多普勒测速检测的欺骗检测算法,观测信息转化为每一次多普勒测出的速度值与惯性传感器测出的速度值的矢量差[4,6],假设接收机多普勒测速的方差值与惯性传感器测速的方差值一致,均为∑a,二元假设检验变为
H0:由于无欺骗时,单个接收机多普勒测速值与惯性传感器测速值一致,速度的矢量差为0,方差为2∑a,所以
H0~N(0,2Σa).
(16)
H1:有欺骗时,单个接收机多普勒测速值与惯性传感器测速值不一致,设速度的矢量差为μ,方差为2∑a,所以
H1~N(μ,2Σa)
(17)
可得,

(18)
考虑

(19)

(20)

(21)
可以得到虚警概率为
(22)
由式(22)可以得到阈值λ的表达式为

(23)
检测概率可写为

(24)
设

(25)
所以可得检测概率的表达式

(26)
式(23)即为本节的欺骗模型中观测量阈值的表达式,即在欺骗试验中,当接收机两个速度之间的矢量差已知时,由式(23)可以得到观测量阈值,当欺骗试验中得到的观测量大于阈值时,判定受到欺骗,当观测量小于阈值时,判定未受到欺骗,在式(23)中可以看出阈值与接收机两个速度的矢量差、测速精度和虚警概率有关。
式(26)即为此欺骗模型中检测概率的表达式,可以看出检测概率与接收机两个速度的矢量差、测速精度和虚警概率有关,通过式(26)可以得到不同条件下检测概率的理论值与相关量之间的对应曲线图。当设定Pfa=10-6,σ0依此取1 m/s、2 m/s和5 m/s时,可得图3所示的结果。
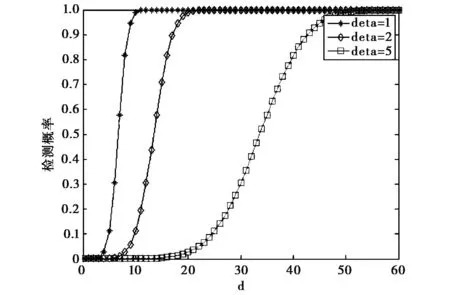
图3 σ0不同时,检测概率随μ的变化规律
在图3中可以发现,在Pfa取一定值的条件下,接收机测速精度越高,得到的检测概率越好。当设定Pd为0.9时,由式(26)可以得到不同σ0对应的接收机速度矢量差(μ),如表1所示。
表1Pd为0.9,Pfa=10-6时,σ0与μ的数值对照

σ0(m/s)125μ(m/s)8.535017.070042.6750
当设定σ0为2 m/s,Pfa依此取10-5、10-6和10-7时,可得如图4所示的结果。

图4 虚警概率不同时,检测概率随μ的变化规律
图4中可以发现,在σ0取一定值的条件下,设定的虚警概率越高,得到的检测概率越好。同样设定Pd为0.9时,由式(26)可以得到不同Pfa对应的接收机位置间距值(μ),如表2所示。
表2Pd为0.9,σ0=2m/s时,Pfa与μ的数值对照

Pfa10-510-610-7μ/(m/s)15.690017.070018.3300
4结束语
本文从理论分析、Matlab计算两个方面分析了单节点运用多普勒测速检测欺骗干扰的方法,证明了在欺骗覆盖区域内,当接收机接收到的信号均为经转发器转发的欺骗信号时,且不论接收机相对转发器运动与否,接收机多普勒测速解算出的速度矢量均与对转发器解算出的速度矢量一致,与接收机本身的位置坐标、运动速度无关。从而由此提出了基于多普勒测速的单节点检测欺骗方法。正常的不受欺骗信号干扰的情况下,接收机所算出的多普勒测速值应与本身的运动状态有关,与外界的其他因素无关,而从本文得到的结论可以看出,在欺骗情况下,不论接收机相对转发器运动与否,接收机多普勒测速解算出的速度矢量均与对转发器解算出的速度矢量一致,与接收机本身状态无关,所以只要当接收机多普勒测速算出的速度矢量与接收机利用惯性传感器得到的本身运动速度不一致时,即可以检测受到欺骗干扰。紧接着通过Neyman-Pearson方法推导出了基于多普勒测速结果的欺骗干扰检测算法,该算法可以得到不同欺骗条件下的观测量阈值和检测概率的表达式,通过该算法可以得到不同情况下检测概率的理论值,并得到理论值与速度矢量差、虚警概率和接收机测速精度之间的变化关系图,能为检测欺骗干扰又提供新的理论依据。
参考文献
[1]ALIK,X.CHENX,DOVISF,Ontheuseofmultipathestimatingarchitectureforspooferdetection[C]//InProceedingsoftheInternationalConferenceonLocalizationandGNSS2012,Starnberg,Germany,June25-27, 2012.
[2]普兰(美),赫加蒂(美).GPS原理与应用[M].2版 寇艳红译. 北京:电子工业出版社,2007.
[3]黄龙,龚航,朱祥维,等.针对GNSS授时接收机的转发式欺骗干扰技术研究[J]. 国防科技大学学报,2013,35(4):93-96.
[4]高志刚,孟繁智.GPS转发式欺骗干扰原理与仿真研究[J].遥测遥控, 2011,32(6):44-48.
[5]马松.空间机动平台SINS/GPS组合导航系统研究[D]. 哈尔滨:哈尔滨工业大学, 2010.
[6]SWASZEKPF.Analysisofasimple,multiplereceiverGPSspoofdetector[C]//ProceedingsoftheIONITM, 2013.
姚李昊(1990-),男,安徽安庆人,硕士生,主要从事卫星导航抗干扰研究。
陈飞强(1988-),男,湖南益阳人,博士生,主要从事卫星导航抗干扰研究。
聂俊伟(1983-),男,山西忻州人,博士,讲师,主要从事卫星导航接收机研究。
欧钢(1969-),男,湖南株洲人,教授,博士生导师,主要从事卫星导航信息处理算法及工程技术实现方面的研究。
The Spoofing Detection Method Based on Single
Node Doppler Velocimetry
YAO Lihao,CHEN Feiqiang,NIE Junwei,OU Gang
(SchoolofElectronicScienceandEngineering,NationalUniversityofDefenseand
Technology,Changsha410073,China)
Abstract:Due to its low power,concealment and other advantages,jamming has become an important means to interfere with the satellite navigation signals. In this paper, we present a new single-node spoofing detection methods from the theoretical analysis and numerical calculation aspects, and using Neyman-Pearson method derived single node jamming detection algorithms. This paper proves the value of Doppler velocimetry having the physical characteristics of area mapped to a single point in the case of jamming. This provides a theoretical basis for the subsequent jamming detection algorithm design.
Key words:Satellite navigation system; single antenna; repeater deception jamming; Doppler velocimetry
作者简介
收稿日期:2015-11-20
中图分类号:TN967.1
文献标志码:A
文章编号:1008-9268(2015)06-0006-06
doi:10.13442/j.gnss.1008-9268.2015.06.002
