机器人辅助训练改善脑卒中患者上肢功能障碍的系统评价
2015-01-31郭佳宝杨雨洁张文毅南京中医药大学第二临床医学院江苏南京20023
郭佳宝 杨雨洁 谢 斌 张文毅 朱 毅 (南京中医药大学第二临床医学院,江苏 南京 20023)
机器人辅助训练改善脑卒中患者上肢功能障碍的系统评价
郭佳宝 杨雨洁 谢 斌 张文毅1朱 毅 (南京中医药大学第二临床医学院,江苏 南京 210023)
目的 系统评价机器人辅助训练对脑卒中患者上肢功能障碍的康复效果。方法 计算机检索国内外数据库中关于机器人辅助训练改善脑卒中患者上肢运动功能障碍的随机对照试验,同时检索已纳入文献的参考文献。研究人员对纳入文献进行严格评估及资料提取,采用Rev-Man 5.1软件进行Meta分析。结果 共纳入23个随机对照试验。Meta分析显示:机器人辅助治疗4 w、>4 w及随访3个月时的Fulg-Meyer运动功能量表上肢总的评分与对照组比较,总体差异有统计学意义〔WMD(95%CI)的值为6.86(3.25,10.46)〕;训练<6 w,脑卒中患者的Fugl-Meyer运动功能量表上肢近端的评分与对照组比较,差异有统计学意义〔WMD(95%CI)的值为1.38(0.52,2.23)〕,上肢远端的评分与对照组比较,差异无统计学意义〔WMD(95%CI)的值为1.75(-2.63,6.14)〕。结论 机器人辅助训练在一定程度上能改善脑卒中患者的上肢运动功能,尤其是肩肘关节的运动功能。
机器人;脑卒中;上肢
上肢功能障碍是脑卒中明显的后遗症之一。近年来,在脑卒中后上肢功能障碍的康复训练中,除传统的常规训练外,又出现了上肢机器人辅助训练等新的治疗技术〔1〕。人们希望通过机器人辅助训练有效提高患者的上肢功能,但目前国内外临床随机对照研究较少、质量参差不齐,机器人辅助训练改善脑卒中患者上肢功能障碍尚缺乏有力的循证医学证据。本文探讨其在脑卒中康复中的作用并设计有效的实施方案。
1 资料与方法
1.1 文献纳入标准 ①研究设计为公开发表的临床随机对照试验(RCT);②研究对象为脑卒中后患者,英文文献的纳入对象符合WHO 1978年制定的诊断标准〔2〕,中文文献中的符合
1995年全国第4次脑血管病会议制定的诊断标准〔3〕,并经颅脑CT/MRI确诊;③干预措施为机器人辅助训练或机器人辅助训练加常规康复治疗,对照组为常规康复治疗;④结局指标为能反映患者运动功能的指标;⑤文献语种:中文和英文。
1.2 文献排除标准 ①非随机对照试验(综述、自身对照试验、个案报告等);②重复发表;③索取全文无果;④未能提供有效统计数据。
1.3 检索策略
1.3.1 数据库 选择 Pubmed、EMbase、PEDro、Cochrane Central Register of Controlled Trials(CENTRAL)、ISI Web of Knowledge、OVID、知网、万方和维普数据库进行检索。文献检索起止均为从建库至2013年3月。
1.3.2 检索策略 中文数据库检索词为“机器人”、“卒中”、“中风”、“脑血管意外”、“脑血管病”、“脑梗死”、“脑出血”、“上肢”、“手臂”、“手”。外文数据库检索词为“robot”、“robotics”、“ stroke”、“ apoplexy”、“ cerebrovascular accident”、“CVA”、“ upper extremity”、“upper limb”、“arm* ”、“ hand* ”。1.4 文献提取及资料提取
1.4.1 文献提取 对所获文献去重,由2名独立的研究人员根据纳入标准,通过阅读所获文献的题目和摘要进行初筛,然后进一步阅读分析全文,确定符合纳入标准的文献。不同意见讨论解决,必要时由第三位研究人员参与解决,最后达成共识。
1.4.2 资料提取 2名研究人员分别阅读纳入文献的全文,提取资料并交叉核对,内容主要包括:研究对象的纳入与排除标准,研究对象的基本资料,随机分组与盲法,干预措施,治疗方案,结局指标等。
1.5 质量评价 偏倚风险评估 根据Cochrane协作网推荐的偏倚风险评估方法对纳入文献进行风险评估。评估的主要内容包括:①随机分组;②分配隐藏;③盲法(参与者、实施者、评价者);④结果完整性;⑤选择性报告。用“是”表示低偏倚风险,“否”表示高偏倚风险,“不清楚”表示文献未提供足够的信息以供进行偏倚分析。
1.6 统计学方法 采用RevMan5.1软件对资料进行定量分析。通过χ2检验对纳入研究异质性检验。以P≤0.10和I2≥50%为显著性判断标准:若 P≥0.1,I2<50%时,认为有同质性,采用固定效应模型进行Meta分析;若P<0.1,I2≥50%时,则认为有异质性,采用随机效应模型;无法判断异质性来源时,则不进行Meta分析,采用描述性分析。
2 结果
2.1 纳入研究的一般情况 共检索文献817篇,通过去重、阅读题目和摘要得到文献5篇,进一步阅读全文,剔除文献31篇,最终纳入 23 篇〔4~26〕临床研究,其中中文 5 篇〔19,23~26〕,英文18 篇〔4~18,20~22〕。见表 1。
2.2 纳入研究的偏倚风险评价 根据Cochrane协作网推荐的偏倚风险评估方法进行偏倚风险评估。就每项研究而言,Asien等〔4〕、Volpe 等〔5,6〕、Hesse 等〔9〕、Rabadi 等〔14〕、Liao 等〔17〕、Reinkensmeyer〔20〕的研究属于低风险,其余研究风险较高。见图 1、图 2。
2.3 机器人辅助训练对脑卒中患者上肢运动功能恢复的效果评价 Fugl-Meyer运动功能量表能较好地反映患者上肢运动功能的恢复情况,评估时又将其分为总的、近端和远端。这里评价了机器人辅助治疗4 w、>4 w及随访3个月时的Fulg-Meyer总的评分和治疗<6 w的Fulg-Meyer近远端评分。见表2。
表1 纳入研究对象的一般情况(±s)
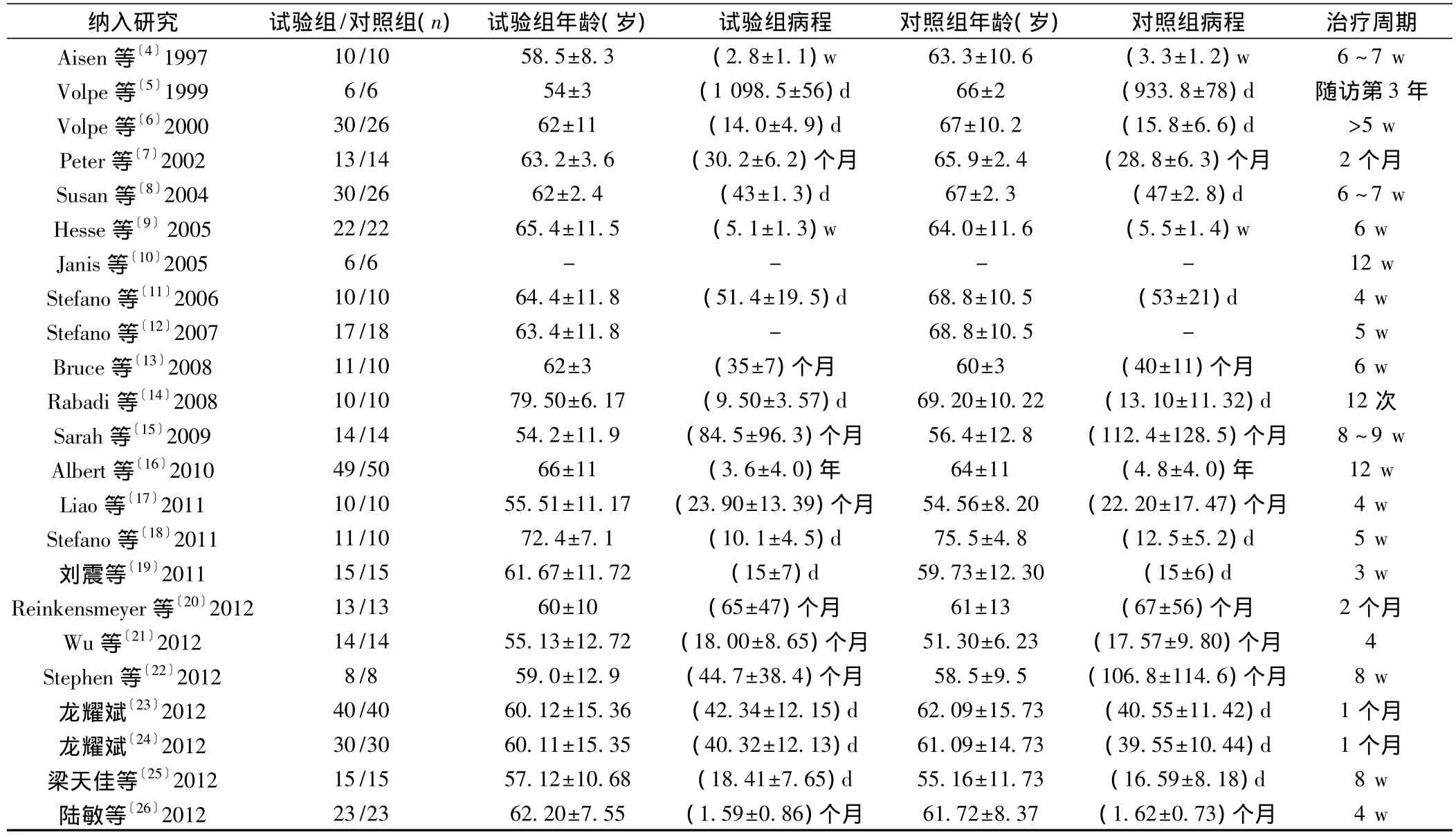
表1 纳入研究对象的一般情况(±s)
纳入研究 试验组/对照组(n) 试验组年龄(岁) 试验组病程 对照组年龄(岁)w 6~7 w Volpe等〔5〕1999 6/6 54±3 (1 098.5±56)d 66±2 (933.8±78)d 随访第3 年Volpe 等〔6〕2000 30/26 62±11 (14.0±4.9)d 67±10.2 (15.8±6.6)d >5 w Peter等〔7〕2002 13/14 63.2±3.6 (30.2±6.2)个月 65.9±2.4 (28.8±6.3)个月 2 个月Susan 等〔8〕2004 30/26 62±2.4 (43±1.3)d 67±2.3 (47±2.8)d 6 ~7 w Hesse 等〔9〕2005 22/22 65.4±11.5 (5.1±1.3)w 64.0±11.6 (5.5±1.4)w 6 w Janis等〔10〕2005 6/6 - - - - 12 w Stefano 等〔11〕2006 10/10 64.4±11.8 (51.4±19.5)d 68.8±10.5 (53±21)d 4 w Stefano 等〔12〕2007 17/18 63.4±11.8 - 68.8±10.5 - 5 w Bruce等〔13〕2008 11/10 62±3 (35±7)个月 60±3 (40±11)个月 6 w Rabadi等〔14〕2008 10/10 79.50±6.17 (9.50±3.57)d 69.20±10.22 (13.10±11.32)d 12 次Sarah 等〔15〕2009 14/14 54.2±11.9 (84.5±96.3)个月 56.4±12.8 (112.4±128.5)个月 8 ~9 w Albert等〔16〕2010 49/50 66±11 (3.6±4.0)年 64±11 (4.8±4.0)年 12 w Liao等〔17〕2011 10/10 55.51±11.17 (23.90±13.39)个月 54.56±8.20 (22.20±17.47)个月 4 w Stefano 等〔18〕2011 11/10 72.4±7.1 (10.1±4.5)d 75.5±4.8 (12.5±5.2)d 5 w刘震等〔19〕2011 15/15 61.67±11.72 (15±7)d 59.73±12.30 (15±6)d 3 w Reinkensmeyer等〔20〕2012 13/13 60±10 (65±47)个月 61±13 (67±56)个月 2个月Wu 等〔21〕2012 14/14 55.13±12.72 (18.00±8.65)个月 51.30±6.23 (17.57±9.80)个月 4 Stephen 等〔22〕2012 8/8 59.0±12.9 (44.7±38.4)个月 58.5±9.5 (106.8±114.6)个月 8 w龙耀斌〔23〕2012 40/40 60.12±15.36 (42.34±12.15)d 62.09±15.73 (40.55±11.42)d 1 个月龙耀斌〔24〕2012 30/30 60.11±15.35 (40.32±12.13)d 61.09±14.73 (39.55±10.44)d 1 个月梁天佳等〔25〕2012 15/15 57.12±10.68 (18.41±7.65)d 55.16±11.73 (16.59±8.18)d 8 w陆敏等〔26〕2012 23/23 62.20±7.55 (1.59±0.86)个月 61.72±8.37 (1.62±0.73)个月对照组病程 治疗周期Aisen 等〔4〕1997 10/10 58.5±8.3 (2.8±1.1)w 63.3±10.6 (3.3±1.2)4 w
2.3.1 F-M上肢总评分的亚组和总体有效性比较 23项研究〔4~26〕均报道了机器人辅助训练对脑卒中患者F-M上肢评分的影响,其中数据统计形式一致的有 14〔6,8,9,13,14,17,21~26〕篇,共532例患者。各研究间存在异质性,故采用随机效应模型并进入亚组分析。结果显示:机器人辅助训练对脑卒中患者上肢总的运动功能的作用效果与其他康复方式相比,总体差异有统计学意义〔WMD=6.86,95%CI(3.25,10.46)〕;经亚组分析,治疗4 w,差异无统计学意义〔WMD=4.82,95%CI(-1.59,11.23)〕;治疗大于 4 w,差异有统计学意义〔WMD=6.50,95%CI(1.67,11.33)〕;随访第3 个月,差异有统计学意义〔WMD=9.72,95%CI(3.30,16.13)〕,见图 3。
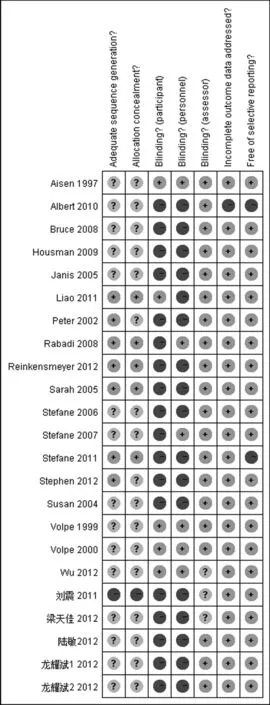
图1 偏倚风险项目判断
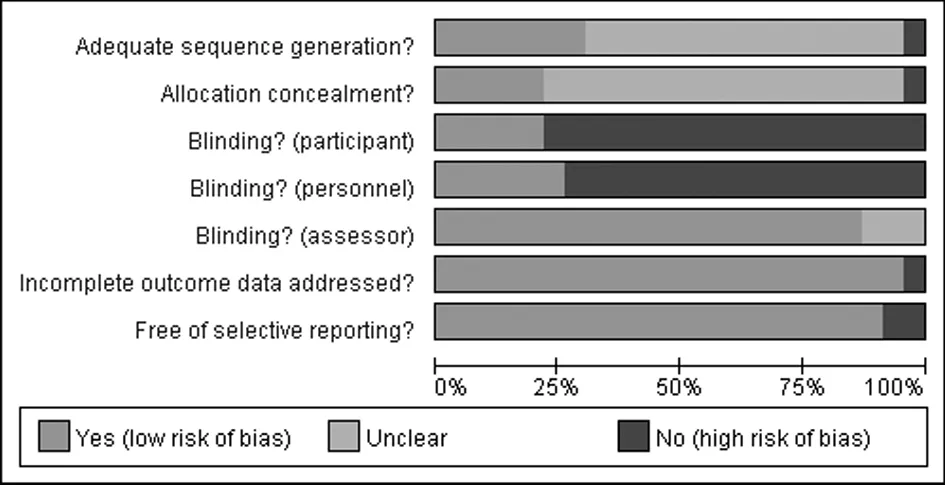
图2 偏倚风险项目百分比
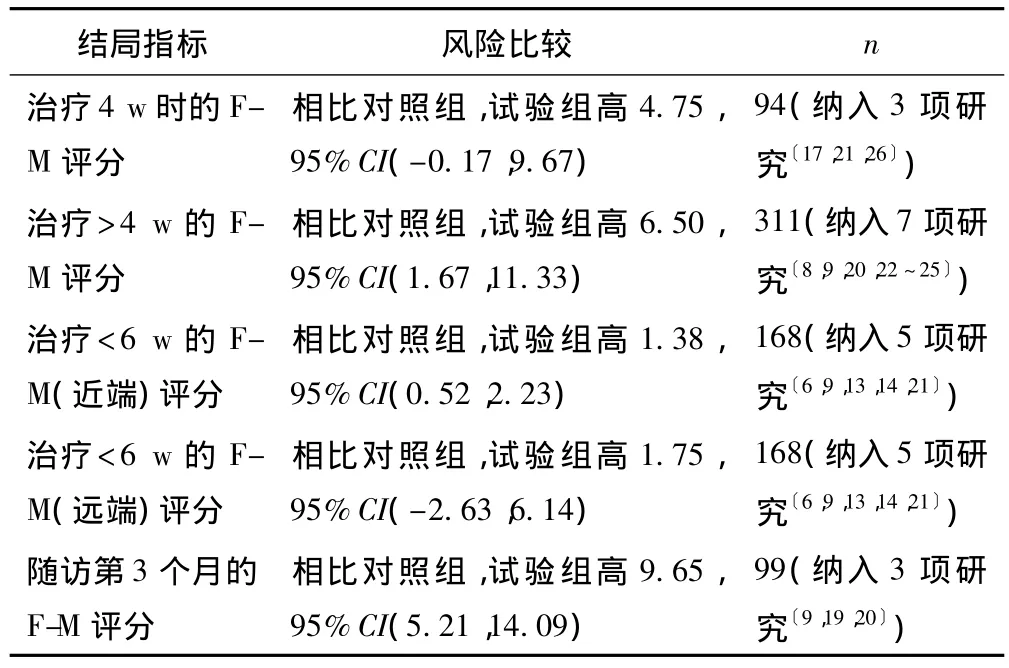
表2 机器人辅助训练对脑卒中后上肢功能障碍康复效果的结果总结表
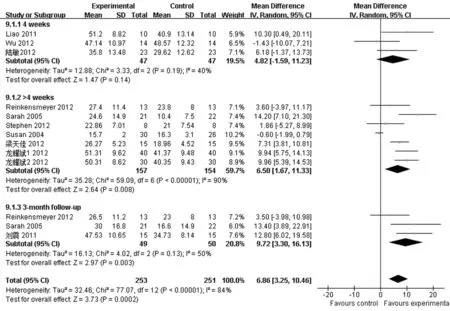
图3 F-M上肢总的评分的亚组和总体有效性比较
2.3.2 固定效应模型分析机器人辅助训练时间<6 w的F-M上肢近端评分比较 5 项研究〔6,9,13,14,21〕均报道了<6 w 的机器人辅助训练对脑卒中患者F-M上肢近端评分的影响,共168例患者。各研究间存在同质性,故采用固定效应模型进行分析。结果显示:<6 w的机器人辅助训练对脑卒中患者上肢近端运动功能的作用效果与其他康复方式相比,差异有统计学意义〔WMD=1.38,95%CI(0.52,2,23)〕,见图 4。
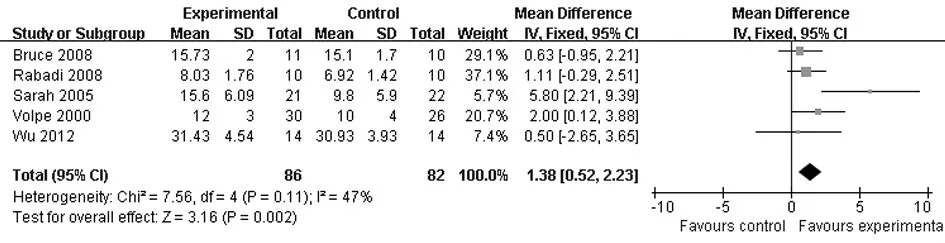
图4 固定效应模型分析机器人辅助训练时间小于6 w的F-M上肢近端评分
2.3.3 随机效应模型分析机器人辅助训练时间<6 w F-M上肢远端评分 5 项研究均〔6,9,13,14,21〕报道了治疗<6 w 的机器人辅助训练对脑卒中患者F-M上肢远端评分的影响,共168例患者。各研究间存在异质性,故采用随机效应模型进行分析。结果显示:<6 w的机器人辅助训练对脑卒中患者上肢远端运动功能的作用效果与其他康复方式相比,差异无统计学意义〔WMD=1.75,95%CI(-2.63,6.14)〕,见图 5。
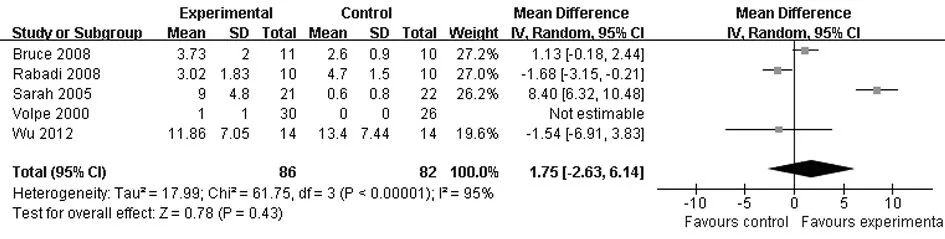
图5 随机效应模型分析机器人辅助训练时间<6 w F-M上肢远端评分
3 讨论
纳入的 23 项研究〔4~26〕中,有 5 项研究〔4~6,17,21〕对患者采用盲法,6 项研究〔4~6,12,14,21〕对实施者采用盲法,3 项研究〔19,21,25〕对评估者的盲法描述均不清楚;此外,1项研究〔19〕按照患者意愿进行随机分组,所以随机分组和分配隐藏存在高风险,15项研究〔4~6,8,10~13,15,16,21,23~26〕对随机分组描述均不清楚,17 项研究〔4~8,10~13,15,16,21~26〕对分配隐藏描述均不清楚;1 项研究〔16〕存在数据不完整;2项研究〔16,18〕在选择性报道方面存在高风险。因此,纳入研究的主要偏倚风险来源于盲法的实施,随机分组和分配隐藏的不充分。
机器人辅助训练4 w时的Fugl-Meyer运动功能量表上肢总的评分、<6 w的Fugl-Meyer运动功能量表上肢远端的评分,Meta分析的结果均显示存在异质性。分析纳入研究间存在异质性的原因主要为研究对象的病程不一,F-M的基线水平不一,各研究采用的机器人辅助训练设备不一,且各研究的治疗强度也不一致。
系统评价效果表明,机器人辅助训练大于4 w及随访第3个月时脑卒中患者的Fugl-Meyer运动功能量表上肢总的评分提高,且训练小于6 w的Fugl-Meyer运动功能量表上肢近端的评分提高,说明在经过一定训练时间后上肢运动功能得到改善,尤其是近端肩肘关节的运动功能。
本文通过Meta分析,将机器人辅助训练治疗脑卒中后上肢功能障碍的单个研究结果进行合并分析,通过增大样本量减少随机误差,加强统计分析效能,提高对干预的论证强度。分析得出机器人辅助训练能提高患者上肢运动功能的结论,但由于纳入研究中关于评估日常生活活动的结局指标不统一或数据统计形式不一致等原因,未能对该类指标进行Meta合并分析,所以无法得出关于日常生活活动的康复效果的结论。未来仍需开展大样本、多中心、试验设计更完善的高质量随机对照试验来更准确地说明机器人辅助训练的康复疗效,以期为机器人辅助训练在临床康复中的应用提供一定的依据。
1 毕 胜,季林红,纪树荣.机器人辅助神经康复训练的研究进展〔J〕.中国康复医学,2004;19(12):931-2.
2 World Health Organisation.Cerebrovascular disorders of set publications〔M〕.Geneva:World Health Organization,1978:21-3.
3 中华医学会全国第4次脑血管病学术会议.各类脑血管病诊断要点〔J〕.中华神经科杂志,1996;29:379-81.
4 Aisen ML,Krebs HI,Hogan N,et al.The effect of robot-assisted therapy and rehabilitative training on motor recovery following stroke〔J〕.Arch Neurol,1997;54:443-6.
5 Volpe BT,Krebs HI,Hogan N,et al.Robot training enhanced motor outcome in patients with stroke maintained over 3 years〔J〕.Neurology,1999;53(8):1874-6.
6 Volpe BT,Krebs HI,Hogan N,et al.A novel approach to stroke rehabilitation:robot-aided sensorimotor stimulation〔J〕.Neurology,2000;54(10):1938-44.
7 Peter SL,Charles GB,Peggy CS,et al.Robot-assisted movement training compared with conventional therapy techniques for the rehabilitation of upper-limb motor function after stroke〔J〕.Arch Phys Med Rehabil Vol,2002;83:952-9.
8 Susan EF,Hermano IK,Mark F,et al.Does shorter rehabilitation limit potential recovery poststroke〔J〕.Neurorehabi Neural Repair,2004;18(2):88-94.
9 Hesse S,Werner C,Pohl M,et al.Computerized arm training improves the motor control of the severely affected arm after stroke:a single-blinded randomized trial two centers〔J〕.Stroke,2005;36:1960-6.
10 Janis JD,Neville H,Elizabeth M,et al.Response to upper-limb robotics and functional neuromuscular stimulation following stroke〔J〕.J Rehab Res Dev,2005;42(6):723-36.
11 Stefano Masiero,Andrea Celia,Mario Armani,et al.A novel robot device in rehabilitation of post-stroke hemiplegic upper limbs〔J〕.Aging Clin Exp Res,2006;18:531-5.
12 Stefano Masiero,Andrea Celia,Giulio Rosati,et al.Robotic-assisted rehabilitation of the upper limb after acute stroke〔J〕.Arch Phys Med Rehabil Vol,2007;88:142-9.
13 Bruce TV,Daniel Lynch,Avrielle Rykman-Berland,et al.Intensive sensorimotor arm training mediated by therapist or robot improves hemiparesis in patients with chronic stroke〔J〕.Neurorehab Neural Repair,2008;22(3):305-10.
14 Rabadi MH,Galgano M,Lynch D,et al.A pilot study of activity-based therapy in the arm motor recovery post stroke:a randomized controlled trial〔J〕.Clin Rehabil,2008;22:1071-82.
15 Housman SJ,Scott KM,Keinkensmever DJ,et al.A randomized controlled trial of gravity-supported,computer-enhanced arm exercise for individuals with severe hemiparesis〔J〕.Neurorehabil Neural Repair,2009;23(5):505-14.
16 Albert CL,Peter DG,Lorie GR,et al.Robot-assisted therapy for longterm upper-limb impairment after stroke〔J〕.N Eng J Med,2010;362:1772-83.
17 Liao WW,Wu CY,Hsieh YW,et al.Effects of robot-assisted upper limb rehabilitation on daily function and real-word arm activity in patients with chronic stroke:a randomized controlled trial〔J〕.Clin Rehabil,2011;26(2):111-20.
18 Stefano Masiero,Mario Armani,Giulio Rosati.Upper-limb robot-assisted therapy in rehabilitation of acute stroke patients:focused review and results of new randomized controlled tria〔lJ〕.J Rehabil Res Dev,2011;48(4):355-66.
19 刘 震,张盘德,刘翠华,等.机器人治疗急性期脑卒中患者上肢功能的恢复〔J〕.中国组织工程研究与临床康复,2011;15(52):9803-7.
20 Reinkensmeyer DJ,Wolbrecht ET,Chan V,et al.Comparison of three-dimensional,assist-as-needed robotic arm/hand movement training provided with Pneu-WREX to conventional tabletop therapy after chronic stroke〔J〕.Am J Phys Med Rehabil,2012;91(11):232-41.
21 Wu CY,Yang CL,Chuang LL,et al.Effect of therapist-based versus robot-assisted bilateral arm training on motor control,functional performance,and quality of life after chronic stroke:a clinical tria〔lJ〕.Physical Ther,2012;92(8):1006-16.
22 Stephen JP,Valerie Hill,Susan White.Portable upper extremity robotics is as efficacious as upper extremity rehabilitative therapy a randomized controlled pilot tria〔lJ〕.Clin Rehabil,2012;1-10.
23 龙耀斌.康复机器人训练对脑卒中偏瘫患者上肢功能的影响〔J〕.中国康复,2012;27(3):171-3.
24 龙耀斌.上肢康复机器人训练对脑卒中偏瘫患者上肢功能的影响〔J〕.广西医科大学学报,2012;29(2):260-1.
25 梁天佳,吴小平,莫明玉.上肢康复机上肢康复机器人在脑卒中单侧空间忽略康复中的作用〔J〕.中国康复理论与实践,2012;18(4):369-71.
26 陆 敏,魏风芹,肖 峰,等.上肢康复机器人训练治疗脑卒中偏瘫患者〔J〕.中国康复,2012;27(6):411-3.
R743.3
A
1005-9202(2015)09-2383-05;
10.3969/j.issn.1005-9202.2015.09.032
十二五国家科技支撑计划资助项目(2012BAI10B00);2012年江苏省“青蓝工程”资助项目;南京中医药大学中医学一级学科开放课题(YS2012ZYX408);江苏省高等院校大学生实践创新训练计划项目(No.201302)
1 江苏省人民医院钟山康复分院
朱 毅(1981-),男,讲师,副主任治疗师,主要从事康复医学研究。
郭佳宝(1991-),女,硕士,主要从事康复医学研究。
〔2013-08-06修回〕
(编辑 安冉冉/曹梦园)
·心脑血管、代谢性疾病·