无线传感器网络(WSN)技术在小型组足球机器人比赛中的应用
2015-01-29赵祥模徐志刚
王 振,赵祥模,徐志刚
(长安大学 陕西省道路交通智能检测与装备工程技术研究中心,陕西 西安 710064)
随着科学技术的不断发展,机器人在越来越多的领域里得到了应用。机器人学科融合了机械、电子、传感器、计算机、人工智能等许多学科的理论与技术,是当今世界许多前沿领域技术的综合体[1]。在众多的机器人种类中,特别是RoboCup小型组足球机器人系统面向交叉学科,涉及机械,电子,自动控制,检测,计算机乃至信息技术人工智能,具有广阔的研究前景。足球机器人系统(RSS)是一种典型的多机器人系统,具有开放式、分布式、动态的和实时等特点[2],足球机器人赛场情况千变万化,需要所有机器人相互协作对赛场情况作出及时反映。在整个机器人比赛过程中,机器人子系统从决策子系统获取信息则是非常重要的环节。因此就必须保证通讯系统的可靠性、稳定性和实时性。
目前广泛采用的无线通讯方式是以中心广播方式发送数据给所有机器人,根据信息中包含的ID来区分接受对象,在这种通讯方式下,机器人之间相互孤立的,外界各种各样的干扰经常会出现某个机器人接收不到数据的现象,就会对比赛造成很大的影响,同时这种方式的通讯速率较慢。针对上述通讯存在的不足之处,文中提出了一种改进方法,即采用无线传感器网络(WSN)来实现信息的无线传输,无线传感器网络技术克服了传统的数据点对点无线传输模式的局限性,具有拓扑结构动态性强、自组织性以及网络分布式特性,同时具有低成本、低功耗、超强通信能力、通信距离远和抗干扰能力强等诸多优点。保证了系统的可靠性,提高了通讯速率。
1 足球机器人系统
对足球机器人的通讯系统进行改进主要是为了达成两个目标:一是为了保证数据的可靠传输,二是为了提高通讯速率。足球机器人无线通讯系统具有一对多,易受干扰影响等特点。因此,在设计无线通讯系统时必须要考虑这些因素。典型的足球机器人系统如图1所示,由4个子系统[3]构成:
1)视觉子系统:摄像机、图像处理与识别计算机。
2)决策子系统:决策和运动控制模块。
3)无线通讯子系统:计算机无线数据发射和足球机器人的无线数据接收模块。
4)机器人平台系统:多个机器人小车,无线数据接收模块、运动控制模块、及其他电子配件。
比赛开始以后,首先由视觉子系统进行场景识别,视觉子系统从摄像头获得比赛赛场的信息,经图像采集卡采集图像信息后,计算机对采集的数据进行处理;然后将信息传给决策子系统,决策子系统得到球员和球的数据结果信息后,产生各球员的控制命令;再通过通讯子系统将控制命令发给比赛场地的球员,最后足球机器人执行命令,完成任务。
无线通讯子系统是足球机器人系统的重要组成部分,该系统的任务是传送由决策子系统产生的机器人控制指令到足球机器人接收模块中。无线通讯子系统的组成包括无线数据接收器和无线数据发射器。无线数据发射器是用无线载波形式把机器人运动控制指令数据发送出去,无线数据接收器接收信号后,解调成机器人运动控制指令,其工作原理如图2所示。

图1 系统总体结构图Fig.1 Structure diagram of the overall system

图2 无线通讯子系统结构图Fig.2 Structure diagram of the wireless communication part
2 传统的无线通信方式
根据比赛规则,足球机器人的通讯采取无线通讯方式。为了实现一对多的通讯,传统的足球机器人采用广播方式进行通信,所有机器人采用统一的通讯频率。而发给不同的足球机器人的命令则根据各自的标识位加以区别。每个机器人都能够接收到上位机发送的任一条指令,如果机器人检测出信号的某一字节与自己的标识相符,则随后的命令被判断为有效,即是执行的命令。
2.1 传统无线通信方式介绍
无线通讯系统的主要任务就是要将主计算机的命令准确无误地传送给机器人平台,使足球机器人按照决策系统的指令做出踢球、带球、传球等动作。
决策子系统对机器人平台的通讯是单向的,采用广播式的无线通讯方式:每个控制周期无线发射器发射一帧数据给本方机器人,各机器人平台根据自身编号读取数据帧的不同字段,获得自己的运动控制指令。广播式无线通讯示意图如图3所示。
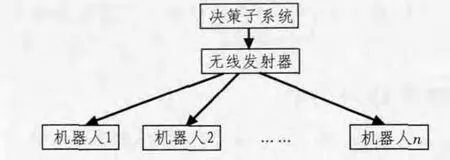
图3 广播式无线通信Fig.3 Broadcasting wireless communication
2.2 传统无线通信方式的缺点
传统的无线通信方式必须依靠点对点的通信方式来完成信息的传输,可以看出,当前小型组足球机器人无线通讯系统的有如下缺点:
1)它是一个一对多的无线通讯,场上有己方的5个机器人,就必须每个机器人有自己的指令标识,才能接收到自己的控制指令,容易出现误读和误解析。
2)由于在比赛中存在许多干扰,比如机器人自身直流电机的噪音、系统其他设备内噪音干扰、还有比赛双方使用的频率波段相近引起的干扰等。而该系统没有错误纠正和报文重发机制,所以该系统较易出现传输失败,进而影响比赛的进行。
3)从整个足球机器人的工作流程可以看出要灵活有效地控制机器人小车就必须使每个控制周期的时间尽可能短,这种对每个机器人进行轮训传递信息的方式无疑会延长系统的控制周期,带来较大的迟滞。
3 基于WSN的新型无线通讯方式
3.1 WSN简介
无线传感器网络WSN(Wireless?Sensor?Networks)技术综合了传感器技术、嵌入式系统技术、网络无线通信技术、分布式信息处理技术[4]等,能够通过各类集成化的微型传感器节点,实时监测、感知和采集各种环境或监测对象的信息。每个传感器节点都具有无线通信功能,从而组成一个无线网络。
无线传感器网络(WSN)技术克服了传统的数据点对点无线传输模式的局限性,具有拓扑结构动态性强、自组织性以及网络分布式特性,同时具有低成本、低功耗、超强通信能力、通信距离远和抗干扰能力强等诸多优点[5]。其网络体系结构如下图所示。
3.2 WSN在足球机器人中的无线通讯方式
在比赛过程中,决策子系统会根据视觉子系统采集处理得到的现场信息制定下一步决策方案,即场上所有机器人的下一步运动策略,此时,由中心节点发出的无线指令将传输到比赛场上,场上所有的机器人均可看做是一个传感器节点,所有节点随机部署在比赛监测区域内部或附近,此时,根据固化在内部的通信协议,所有机器人平台能够通过自组织方式构成网络。每一个节点获得的数据沿着其他传感器节点逐跳地进行传输,在传输过程中数据可能被多个节点处理,经过多跳后路由到汇聚节点[6],这样就实现了无线自组织网络,进而保证每一条指令都能够准确无误地传送到所有的机器人平台上。有效地保证了无线通讯的效率和稳定性。
4 实验及结果分析
采用对比试验的方式来测试新型无线通信子系统的效果,分别用新型的无线传感器网络通信模块ZM2410和传统的RF24L01的无线收发模块做了对比测试,新型的无线传感器网络WSN技术具有如下优点:
1)通讯速度明显提高。
经过实验测试给6个机器人平台发送数据 (计算机以115200波特率与发射器通信),在相同情况下采用ZM2410的发送数据量为传统Rf24L01模块的3-5倍。
2)系统稳定性提高。
采用WSN后的通讯系统中,信息的丢包率由原来的7%降至1%。
3)收到错误指令的几率几乎为0。
由于WSN采用自组织的网络拓扑结构实现,相邻节点直接会自动进行数据共享,使得系统几乎不可能收到错误的指令数据。在对比测试中,从发射器发送相同次数的数据(300次),记录机器人接收到数据正确(通信成功)和错误(通信失败)的次数,实验结果如表1所示。

表1 两种无线通信子系统的测试结果Tab.1 The result of two wireless communication subsystem
综合比较两种通讯系统.可以看出WSN通讯系统有通信距离远、误码率低稳定性高等优点,并且通信的有效距离能够满足机器人足球比赛的要求。
5 结 论
本文将无线传感网络技术应用于小型组足球机器人比赛之中,主要用于构建足球机器人的无线通讯子系统,实现决策计算机和场上各个足球机器人的无线信息传输。相比于传统的无线收发方式,文中通讯子系统具有更高的通讯速率、更低的误码率、更大的通讯范围等优点,极大地提升了足球机器人的响应时间和控制能力,更加有利于群体机器人之间的协作。因此,采用改进后的比赛系统能够满足机器人比赛中对无线通信的要求,增强了系统的稳定性,更加有利于足球机器人在比赛中的发挥。
[1]周科.RoboCup小型组(F180)足球机器人运动控制和路径规划[D].浙江:浙江大学,2004.
[2]Payton D,Daily M,Estowski R,et al.Pheromone Robotics[J].Autonomous Robots,2001,11(3):319-324
[3]赵爽.小型足球机器人的模块化设计与运动控制研究[D].成都:西南交通大学,2014.
[4]李彬,王文杰,殷勤业,等.无线传感器网络节点协作的节能路由传输[J].西安交通大学学报,2012,46(6):1-6 LI Bin,WANG Wen-jie,YIN Qin-ye,et al.An energyefficient routing with sensor nodes cooperation in wireless sensor network[J].Journal of Xi’an Jiaotong University,2012,46(6):1-6.
[5]张玉鹏,刘凯,王广学.基于无线传感器网络的跨层拥塞控制协议[J].电子学报,2011,39(10):2258-2262.ZHANG Yu-peng,LIU Kai,WANG Guang-xue.Cross-layer congestion control for wireless sensor networks[J].Acta Electronica Sinica,2011,39(10):2258-2262.
[6]宋威,李文锋,雷斌,等.基于WSN的群体机器人实验平台设计[J].计算机研究与发展,2010(47):345-349.SONG Wei,LI Wen-feng,LEI Bin,et al.Design of a WSN-based testbed for swarm-robots[J].Journal of Computer Research and Development,2010(47):345-349.