机动雷达中对称机构同步控制技术的应用
2015-01-29安徽博微长安电子有限公司朱艮村皇淼淼
安徽博微长安电子有限公司 朱艮村 许 笑 李 明 皇淼淼
机动雷达中对称机构同步控制技术的应用
安徽博微长安电子有限公司 朱艮村 许 笑 李 明 皇淼淼
本文介绍了一种以可编程计算机控制器为核心的数字式同步控制器,配以交流伺服驱动器而构成机动雷达对称机构的同步控制系统以及该同步控制系统的控制方法。
机动雷达;可编程计算机控制器;交流伺服;绝对式编码器;同步控制
1 引言
机动雷达的伺服控制系统相对复杂,它需要完成的控制功能有仿生臂控制,调平控制,举升控制,翻转控制,俯仰控制,天线旋转控制。但举升机构,翻转机构,俯仰机构要求运行平稳,并具有足够的抗风能力,因此上述三大机构普遍采用左右对称的结构形式,但这种对称结构又给伺服控制系统增加了难度。[1]
2 数字式同步控制器硬件设计
数字式同步控制器采用贝加莱可编程计算机控制器7CP476.60-1为核心控制模块,贝加莱可编程计算机控制器为全新一代的可编程计算机控制产品,该产品广泛运用于众多通用、特种设备的控制系统中,具有十分卓越的品质和性价比。它具有完全模块化的结构特点,可以根据用户设备要求,在输入、输出、数字量、模拟量、旋转编码器、网络通信接口等方面,均能针对性地提供相应的硬件模块和软件驱动,十分便于系统的备件更换、升级维护。
在以可编程计算机控制器为核心控制模块构成的控制系统中,CPU(中央处理单元)模块必不可少,外加一些功能模块就可以构成一套完整的控制系统。对称机构的同步控制系统相对复杂,控制系统的构成所用到的模块有:数字量输入/输出模块、模拟量输入/输出模块、编码器接口模块、通信接口模块等。[2]各种模块的作用如下:
数字输入模块:上、下限位信号的读入
数字量输出模块:安全保护信号的输出
模拟量输入模块:交流伺服驱动器反馈的扭矩信号的读入
模拟量输出模块:交流伺服驱动器速度控制命令的输出
编码器接口模块:对称机构在运行过程中实际位置的测量
通信接口模块:接收远程控制命令,同时实时反馈系统的状态信息给远程终端
数字式同步控制器硬件组成如图1所示:
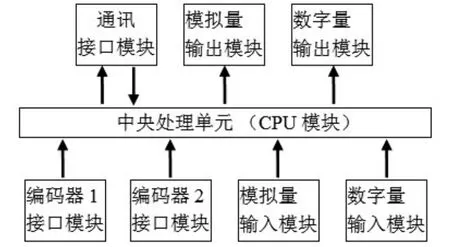
图1 数字式同步控制器硬件组成
3 同步控制系统构成
机动雷达对称机构的同步控制系统中,为保证对称机构在运动过程中不失步,必须设计成闭环同步伺服控制环路。为此需在左右机构的前端或后端分别安装一只多圈绝对式编码器,用以检测左右机构的当前位置信息和失调信息。另外,此编码器抗干扰性较好,系统在断电的情况下也能如实地记录当前的位置信息,系统上电后重新读入即可。
为提高同步控制系统的安全性和可靠性,在左右机构的前端和后端均安装有接近开关和行程开关。
同步系统采用交流伺服电机来带动对称机构的上升或下降运动,交流伺服电机具有动态响应快,定位精度高等诸多特点。另外,与电机配套使用的交流伺服驱动器控制方便,保护功能完善,为系统的安全运行奠定了坚实的基础。[3]
同步系统的部件组成及作用如下:
伺服电机1、2:同时控制对称机构的上升以及下降运动
伺服驱动器1、2:驱动伺服电机正反转
编码器1、2:测量左右机构的当前行程
数字式同步控制器:系统控制中心
机动雷达对称机构的同步控制系统结构组成如图2所示。
4 同步控制原理
对称机构由两只伺服电机带动其上升或下降运动,安装在端点处的绝对式编码器实时反馈左右机构的当前位置信息,同步控制器中的CPU模块读取该位置信息并经过计算比较后得到左右机构的失调信息,用该失调信息转换成电机转速控制电压加至交流伺服控制器的速度命令的输入端,使两只伺服电机分别在当前转速的基础上叠加微调速度以消除失调。[4]
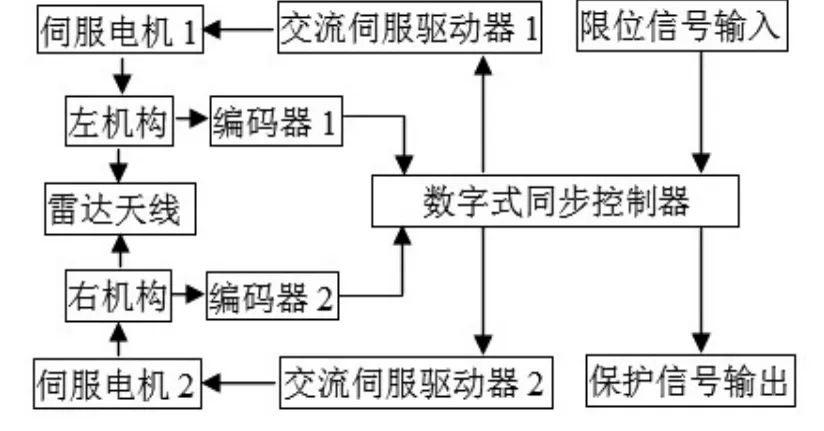
图2 同步控制系统的结构组成
该系统在安全性上采用了冗余设计,确保系统运行万无一失。对称机构在上升或下降运动过程中到位会正常停机;当任一只编码器出现故障时会保护停机;当任一只交流伺服驱动器出现故障时会保护停机;当上、下限位接近开关被触发触发时会保护停机,当上、下限位行程开关被触发时系统断电。同步控制系统的安全保护位如图3所示:
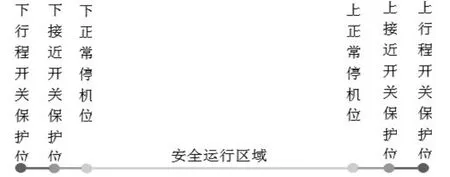
图3 同步控制系统的保护位
5 同步控制软件
同步控制软件是基于贝加莱公司的Automation Studio软件平台开发出来的,Automation Studio提供了大量面向工业控制的函数库资源,充分运用这些软件资源,可以大大简化同步控制软件开发工作。
当遥控终端发出指令时,控制软件首先读取左右机构的编码器值并计算当前位置并与上、下位置比较以判断是否到位,未到位则计算左右机构的失调信息,没有失调则两电机按照给定的速度运动。若失调则先判断失调方向,方向为正则伺服电机1速度=给定速度+微调速度,伺服电机2速度=给定速度-微调速度,方向为负则伺服电机1速度=给定速度-微调速度,伺服电机2速度=给定速度+微调速度。失调信息经运算后作为微调速度与给定的速度叠加送至两交流伺服驱动器的速度命令控制端以微调两伺服电机的转速,使双丝杆在运动时始终保持同步。同步控制软件流程图如图4所示:
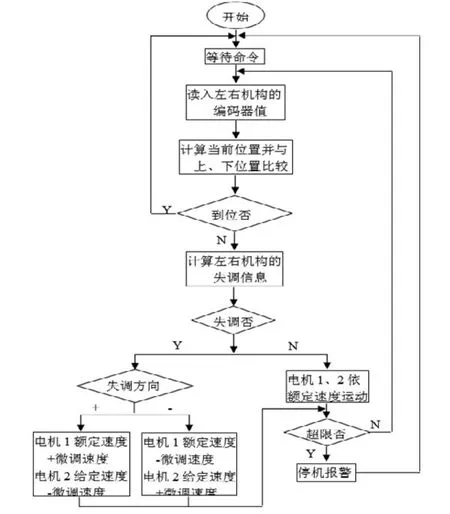
图4 同步控制软件流程图
6 结束语
采用贝加莱公司可编程计算机控制器为核心控制模块设计的对称机构的同步控制系统,降低了硬件设计和软件设计的难度,其硬件和软件都为模块化结构,便于安装、调试和维护。长期应用实践表明:该系统简化了系统结构,节约了硬件成本,提高了控制精度,可靠性高、开放性好、抗干扰能力强,具有良好的发展前景!
[1]王劲宣.高机动雷达天线自动举升系统的结构设计[C].第八届全国雷达学术年会论文集, 合肥:中国科学技术大学出版社,2002:826-830.
[2]陈伯时.自动控制系统[M].北京:机械工业出版社,1990.
[3]胡佑德,曾乐生,马东升.伺服系统原理与设计[M].北京:北京理工大学出版社,1995.
[4]杨龙祥.数字雷达伺服系统问题的探讨[J].现代雷达,1995, (2):53-59.
朱艮村(1975—),男,工程师,现供职于安徽博微长安电子有限公司,主要从事雷达伺服控制系统的研制开发工作。
许笑(1986—),男,工程师,主要从事雷达伺服控制系统的研制开发工作。
李明(1987—),男,硕士,工程师,主要从事雷达伺服控制系统的研制开发工作。
皇淼淼(1988—),女,硕士,工程师,主要从事雷达伺服控制系统的研制开发工作。
