花卉采摘机械手末端执行器及控制方案的设计
2015-01-27殷红梅
殷红梅,王 迪,吕 力
(1.淮安信息职业技术学院,江苏 淮安 223003;2.淮安市高级职业技术学校,江苏 淮安 223005)
0 引言
随着花卉养殖用途的不断推广,人们对于花卉的需求的不断提高,花卉已经成为人们提高生活质量,改善生活环境的一个重要用品。以玫瑰为例,采摘的玫瑰可以用在高级香水、医药、食品、化妆品、香精、香料、及工艺品。由于国内很多地区受气候条件的限制,环境的约束以及玫瑰制作流程较为缓慢等问题,满足不了市场的需求。目前,花卉采摘主要还是采用人工劳作,每到花卉收获时节,都有大批农业劳动者加班加点、不分昼夜的抢抓时间,劳动强度大,效率低,且不可避免的存在花卉挤损的问题,成本高。因此,研制一种中小型花卉采摘机便有着迫切的需要。其中末端执行器作为终端执行部件是采摘机械书的核心构件。本文即是涉及专门针对以玫瑰花为主要花卉采摘对象的机械手末端执行机构,具有良好的研究价值与市场前景。
1 末端执行器设计
本文设计开发一种花卉采摘机械手的末端执行机构,该机构以玫瑰花为主要采摘对象,设计专用花卉抓取、包纳、剪切构件,采用气动驱动控制实现张合。采用万向节连接执行器与机械手,实现多方向位置变换,采用直流力矩电机实现末端执行器的动作驱动。末端执行器结构示意图见图1,机械手简化示意图见图2。

图1 末端执行器结构示意图

图2 机械手简化示意图
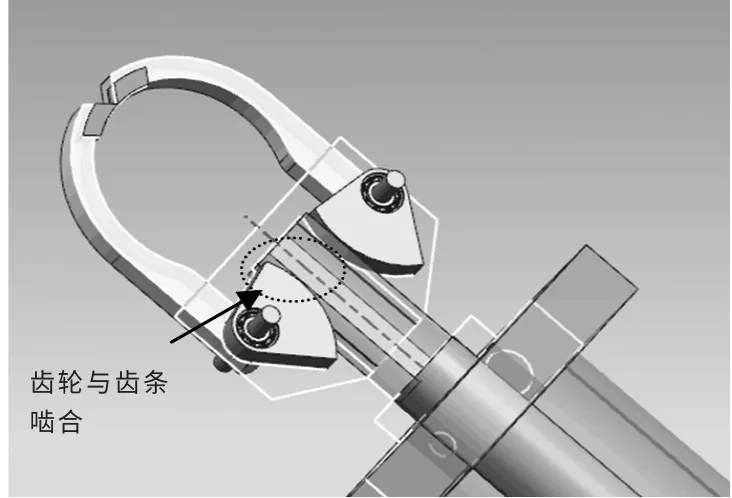
图3 齿轮齿条啮合示意图
该机构解决方案是:设计抓取切割球形薄型槽爪,在气缸与连接法兰的连接下通过齿条状活塞杆与扇形齿轮的啮合进行张合,详见图3,末端执行器工作位置垂直向下,闭合时槽爪包纳被采摘花卉,其边缘的圆弧形刀片同时实现花梗切割动作。采用万向节实现末端执行器与机械臂的连接,在直流力矩电机的驱动下,末端执行器进行转动至机械臂末端花卉存储槽位置,松开薄型槽爪,花卉落入存储槽内。末端执行器返回至垂直向下位置继续工作。
在二号关节臂上设计固定逆止阀存储槽,关节臂工作位置向上时,逆止阀处张开状态,花卉顺利落入存储槽;关节臂工作位置向下时,逆止阀自动关闭,以免花卉在重力作用下掉落。在二号关节臂存储槽上安装重量传感器,实时记录被采摘花卉重量,以便及时回收花卉,记录收获成果。
切割刀片为圆弧形涂层硬质合金刀具,通过螺栓机夹在置刀槽中,为可更换刀片。
末端执行器与机械臂采用十字型万向节进行连接,灵活度好,活动范围大,可实现末端执行器至存储槽的180°无障碍旋转。末端执行器选用直流力矩电机,反应速度快,转矩与转速波动小,机械特性与调节特性线性度好。
2 末端执行器控制方案

图4 末端执行器控制方案原理图
末端执行器控制方案原理如图4 所示。末端执行器控制方案如下:①PLC 控制器发出启动信号,直流力矩电机接收信号通过机械传动驱动末端执行器向下进给至花卉位置;②PLC 控制器继续发出信号完成以下动作,开启气缸,推动气缸内活塞进行运动,促使球形薄型槽型爪张开,瞬间闭合,利用气压瞬间切断花梗,花卉滞留在槽型爪凹槽内;③PLC 控制器发出信号,末端执行器向上旋转至水平位置,再向左(或右)旋转至存储槽位置;④PLC 控制器发出信号,气缸中活塞退回,槽型爪张开,花卉落入存储槽。末端执行器复位至垂直向下位置,准备下一个循环动作。由此,末端执行器一次完整动作完成。
3 机械手工作过程
机械手整体工作过程如下:首先由手持式遥控设备发出启动指令,启动信号,驱动伺服电机,在伺服电机的带动下,机械臂开始动作至花卉上方,末端执行器向下进给至花处,定位完成后,末端执行器开始动作,槽型爪张开进行花卉抓取,闭合进行花卉切割。随后,执行器按可旋转方向旋转270°至存储槽位置,张开槽型爪,实现花卉转移与存储。置于存储槽上的重量传感器实时记录花卉重量,并将称重结果返回至手持遥控设备的显示屏上,以便及时转移清空存储槽。在这一过程中,机械臂可根据位置通过手持遥控设备进行实时调整。所有动作均由手持遥控设备控制。机械手伸展示意图见图5,机械手花卉收纳示意图如图6 所示。

图5 机械手伸展示意图

图6 机械手花卉收纳示意图
4 结束语
该机构的有益效果是准确抓取被采摘花卉,有效切割收纳,实时获取采摘重量,省去二次称重。末端执行器效力的机械手可实现200~1400mm 范围内的花卉采摘,提高工作效率,降低劳动强度与花卉折损率。
[1]居洪玲,姬长英.一种多用途采摘机器人末端执行器的设计[J]. 浙江农业学报,2010,3.
[2]王三民.机械原理与设计[M].北京:机械工业出版社,2004.
[3]徐丽明,张铁中.果蔬果实收获机器人的研究现状及关键问题和对策[J].农业工程学报,2004,5.
[4]姜丽萍,陈树人.果蔬采摘机器人的研究综述四.农业装备技术,2006,1.
[5]周增产,J. Bontsema.荷兰黄瓜收获机器人的研究开发[J].农业工程学校,2001,6.
