多旋翼飞行器动力学建模与控制系统设计
2015-01-27赵永亮周超英
赵永亮,周超英,谢 鹏
(哈尔滨工业大学 深圳研究生院,广东 深圳 518055)
0 引言
多旋翼飞行器是微型飞行器的一种,它相比于其他类型的飞行器有控制灵活,结构简单,能够垂直起降和悬停功能,能够携带设备对地面进行跟踪拍摄和监测。在实际生活中有着广泛的应用。随着新技术的发展,尤其是微机电(MEMS)技术不断取得突破,使得多旋翼飞行器逐渐成为人们研究的热点[1~2]。
1 建立多旋翼飞行器动力学模型
多旋翼飞行器简单的可以看作是多个单旋翼的组合,但是又不同于单旋翼的直升机。因为直升机是靠尾翼来抵消主旋翼的反扭力矩[3],而多旋翼是靠多个旋翼升力与扭矩的不同来提供升力改变飞行方向以及抵消反扭力矩,结构上要比直升机简单很多。本文设计的多旋翼特点是在四旋翼的基础上增加旋翼数量,但同时又不增四旋翼的轴距,虽然旋翼数量为奇数,但是由于单个旋翼产生的自旋扭力并不是很大,同时也可以通过其他四个旋翼的配合抵消自旋的影响。所以它的特点是,在不增加四旋翼尺寸的基础上提高了旋翼的载重。多旋翼飞行器的控制系统是多输入多输出的欠输入系统[4]。
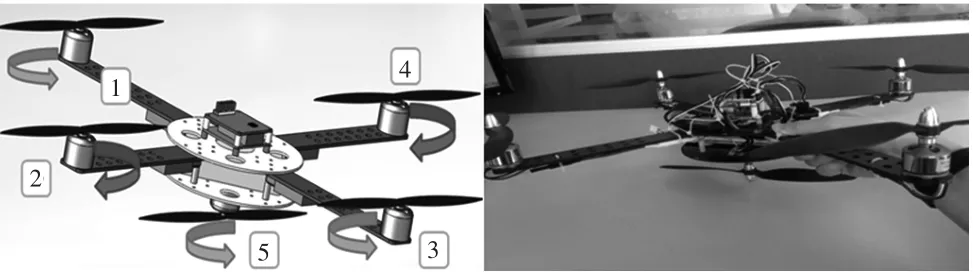
图1 十字模式多旋翼飞行器模型Fig.1 The model of multi rotor aircraft model
由图1 可以得出,旋翼1 和3 逆时针旋转产生顺时针的反扭力矩,而旋翼2 和4 顺时针旋转产生逆时针的反扭力矩,这样顺时针的反扭力矩和逆时针的反扭力矩相互抵消,不需要额外的装置来抵消反扭力矩。旋翼5安装在飞行器的中心位置,能够增加多旋翼的升力。根据十字模式电机位置,可以得出多旋翼飞行器飞行状态控制率,如表1 所示。表中,“+”表示电机转速增加,“-”表示电机转速降低,“/”表示电机转速不做调整,“()”中表示与所给状态反方向调节控制。
四旋翼飞行器有6 个自由度,分别为沿三个坐标轴的平动以及绕三个坐标轴的转动。我们采用ZYX 顺序进行姿态变换,先绕Z 轴旋转得到偏航角ψ,接着绕Y轴旋转得到俯仰角θ,最后,绕X 轴旋转得到横滚角φ。经过以上三次的旋转就可以得到新的载体坐标。因为初始状态旧的载体坐标系与参考坐标系重合,那么Cφθψ为参考坐标系到新载体坐标系的转换矩阵,(Cφθψ)T为新载体坐标系到参考坐标系的转换矩阵[5]。
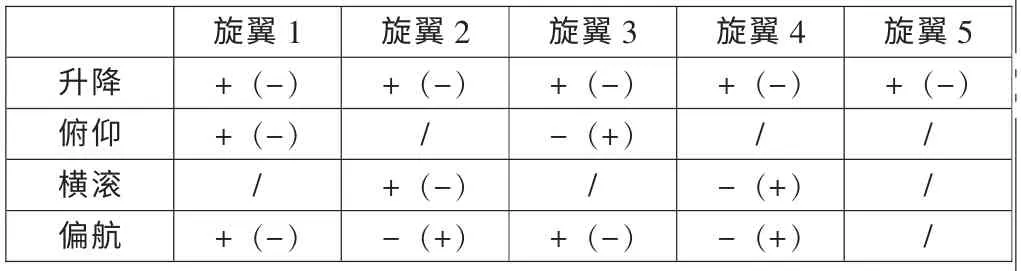
表1 多旋翼飞行器飞行状态控制率Tab.1Multirotoraircraftflightcontrolrate

同时,我们定义绕X、Y、Z 轴的转矩分别为Mφ、Mθ、Mψ,那么对应的转动惯量分别为Iφ、Iθ、Iψ。为了将非线性耦合模型控制量分解成为四个独立的控制量,我们做如下定义:
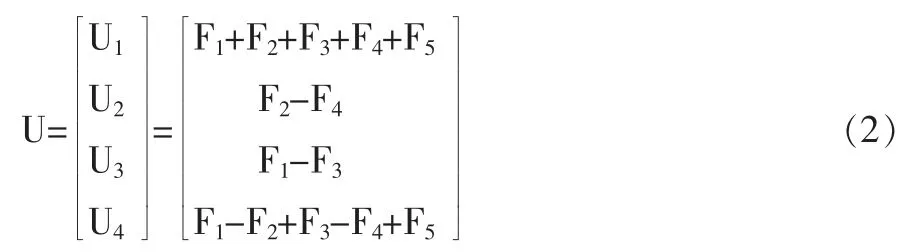
其中,U1代表飞行器的垂直升降控制量,U2代表飞行器的横滚控制量,U3代表飞行器的俯仰控制量,U4代表飞行器的偏航控制量。最终根据以上推导,我们可以求出多旋翼飞行器的简化动力学模型:

其中,L—电机到飞行器重心的距离,K=KM/KF,都为常数[6]。
2 多旋翼模型参数的实验测定
由上文可知,动力学模型中有一些参数需要确定,我们通过实验的方法来完善动力学模型。同时为了使飞行器的效率更高,经测定9 寸桨在相同电机情况下进行实验效率最高。将实验结果输入Matlab 可以得到9 寸桨叶的效率系数KF,升力系数如图2 和图3 所示。

图2 9 寸桨叶的效率系数Fig.2 The efficiency coefficient of 9 inch blade

图3 9 寸桨叶的升力系数Fig.3 9 inch blade lift coefficient
同时还需要通过实验测量扭矩系数KM,考虑到扭矩测量仪的成本比较高,所以重新设计改装了测量装置,通过测量对应的拉或压力,然后通过公式M=F×L 转换为对应的扭矩,实验结果如图4 所示。最终,经过测试与计算可以得到多旋翼飞行器所需要的一些重要参数,如表2 所示。

图4 扭矩测量数据Fig.4 Torque measurement data

表2 多旋翼飞行器重要参数Tab.2Theimportantparametersofmultirotoraircraft
3 PID 控制器设计
我们采用LPV 建立整体数学模型的方法来对模型进行求解[7],假设系统的状态方程为:


在垂直起降以及低速飞行、悬停状态下,俯仰角θ和横滚角φ 变化很小,为了简化模型,那么可以认为θ=φ≈0,同时将实验测得数据代入公式最终可得各个通道的传递函数:

按照控制系统流程图搭建Simulink 仿真并得到PID参数如表3 所示;PID 控制器阶跃响应曲线如图5 所示。

表3 PID参数Tab.3PIDParameters
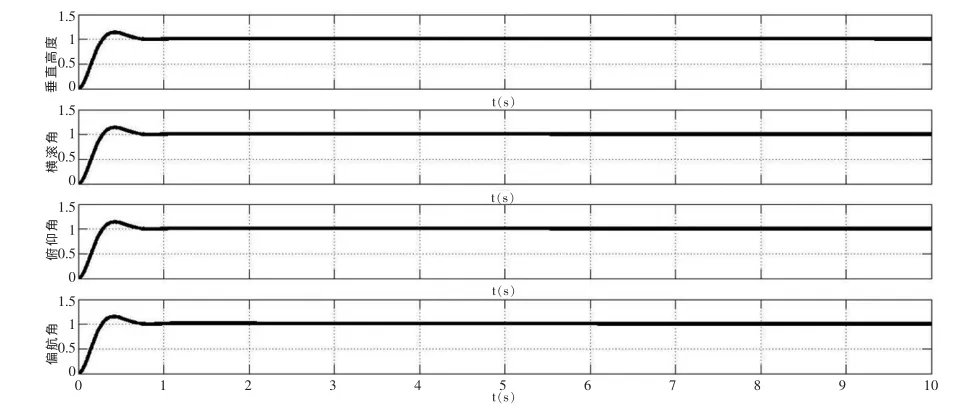
图5 各个通道阶跃响应曲线Fig.5 Each channel of the step response curve
仿真结果表明系统超调量较小,响应速度快,1 秒钟内系统均能达到稳定状态,验证了PID 控制的有效性。
4 结论
本文通过对多旋翼飞行器进行改进,同时进行动力学建模,并对模型参数进行了实验测定。将实验测得的参数带入模型经过计算求出多旋翼飞行器垂直高度、俯仰、横滚、偏航各个通道的传递函数,运用PID 控制算法对模型进行了仿真实验,实验结果表明PID 控制器对模型控制的有效性,同时也说明改进后对多旋翼飞行器是有利的。
[1]杨明志,王敏.四旋翼微型飞行器控制系统设计[J].计算机测量与控制,2008,4.
[2]Chee K Y,Zhong Z W.Control,navigation and collision avoidance for an unmanned aerial vehicle.Sensors and Actuators A:Physical.2013.
[3]Bouabdal lah S, Murrieri P, Siegwart P. Design and Control of an Indoor Micro Quadrotor[J].IEEE, 2005.
[4]岳基隆,张庆杰,朱华勇.微小型四旋翼无人机研究进展及关键技术浅析[J].电光与控制,2010,10.
[5]张天光.捷联惯性导航技术[M].北京:国防工业出版社,2007.
[6]Raymond W. Prouty. Helicopter Performance, Stability, and Control.[M].PWS Engineering Boston,1986.
[7]Papageorgiou G, Glover K. Taking robust LPV control into flight on the VACC harrier[C].Proceedings of the 39th IEEE conference on Decision and Control,2000:.
