电子膨胀阀的双模糊控制器算法研究
2015-01-27高正中赵丽娜刘隆吉白星振
高正中,赵丽娜 ,刘隆吉,白星振,刘 超
(1.山东科技大学 电气与自动化工程学院,青岛 266590;2.青岛港湾职业技术学院 电气工程系,青岛 266404)
电子膨胀阀作为制冷机组的节流控制装置,起着协调压缩机控制制冷剂进入蒸发器流量的作用,对其进行有效的控制是制冷机组节能和稳定运行的关键。相对于传统的节流装置热力膨胀阀或是毛细管,电子膨胀阀调节范围大、反应灵敏、调节精密、稳定可靠。制冷剂在电子膨胀阀中可以双向流动,避免了热力膨胀阀只能单方向流动的缺点及毛细管只能小范围内调节制冷剂流量的不足[1]。
常用的电子膨胀阀的控制算法是PID控制算法,但PID控制算法需要建立在精确的数学模型基础上,然而在很多情况下很难得到蒸发器精确的数学模型,故用PID算法时常不能达到理想的控制效果[2]。近年来随着人工智能算法的不断发展,如模糊控制算法[3]、神经网络算法[4]、自适应算法[5]等,出现了多种将人工智能算法与PID算法相结合的新算法,其中模糊PID控制算法因其控制规律简单,人们易于理解,得到了广泛应用。本文在现有的模糊PID控制算法的基础上提出了一种双模糊控制器算法,在系统启动和稳定运行的过程中,对电子膨胀阀分别控制,保证了过热度由系统启动过程过渡到稳定运行过程中的稳定,并在Matlab环境下建模仿真,仿真实验结果表明了改进算法在控制电子膨胀阀调节过热度上的优势。
1 电子膨胀阀工作原理
制冷机组由压缩机、冷凝器、蒸发器和膨胀阀组成。其工作原理图如图1所示。电子膨胀阀是机电一体化新型节流装置,分为步进电机型和电磁线圈型2种结构形式,使微机控制制冷剂流量成为了可能[6]。
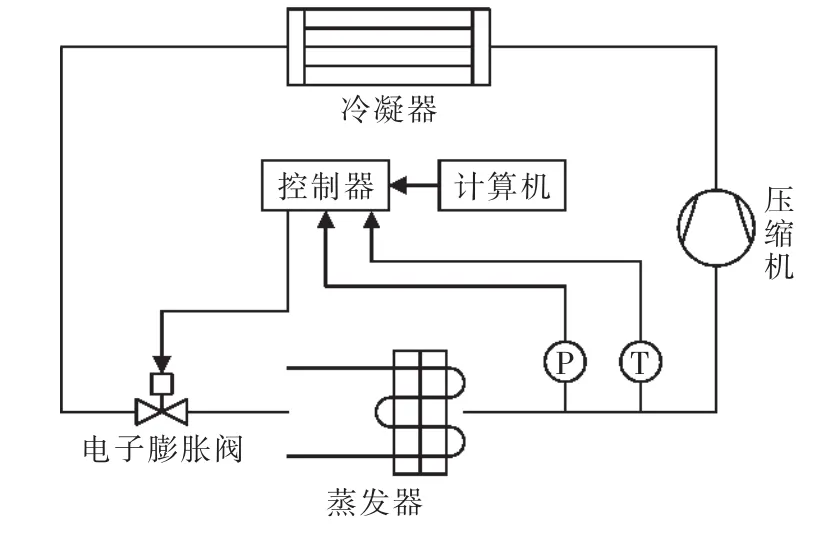
图1 制冷空调系统工作原理图Fig.1 Working schematic diagram of the refrigeration and air conditioning system
本系统采用的电子膨胀阀型号为DZF15,由控制器、执行机构和传感器组成。控制器根据温度传感器反馈回来的蒸发器过热度大小,来控制步进电机的脉冲数,从而由执行机构驱动调整电子膨胀阀的开度,进入蒸发器的制冷剂流量被改变,过热度得到控制。其驱动原理图如图2所示。驱动芯片采用的是美国TI公司开发的高压大电流达林顿晶体管阵列电路ULN2003。该电路具有电流增益高(大于1000),带负载能力强(输出电流可达到500 mA),温度范围宽(-40℃~85℃),工作电压高(大于50 V)的特点。
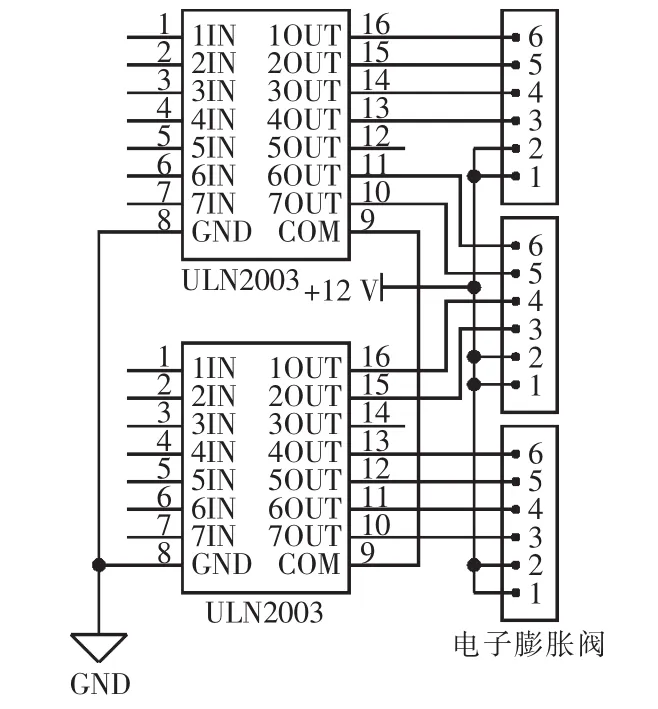
图2 电子膨胀阀驱动电路原理图Fig.2 Driving circuit diagram of the electronic expansion valve
2 电子膨胀阀的常用控制算法
对电子膨胀阀的控制都是以蒸发器的过热度为控制目标的。应用较多的是PID控制算法,即比例-积分-微分控制。PID控制器是一种线性控制器,因其控制简单,对系统参数要求不高,能够根据经验和现场调节控制参数而得到广泛应用。因为计算机系统是离散采样控制系统,为了将PID算法应用到计算机控制系统,常用的是数字PID控制算法,如式(1)所示:

其中:u(k)为控制作用;e(k)为设定值与输出值的偏差;分别为比例、积分、微分系数。比例、积分、微分系数大小的选择对于判定一个PID控制器性能好坏是非常重要的,然而电子膨胀阀的控制系统存在非线性特性、过热度反应滞后、扰动作用强及系统参数相互耦合的特点,使得PID控制参数的选择变得困难。
随着人工智能的不断发展,一些新算法不断涌现,如自适应算法、模糊控制算法、神经网络,其中模糊控制算法因其控制原理简单、控制性能好,尤其适应于非线性系统的控制而得到大量研究。模糊控制最重要的特征是反映人们的经验以及人们的常识推理规则,该算法不需要知道被控对象精确的数学模型便可根据模糊推理对系统被控参数进行调节,达到人们想要的效果[7]。模糊控制算法的原理图如图3所示,分为模糊化、模糊推理和反模糊化3部分构成。模糊化过程将输入基本论域的精确量转化为模糊论域的离散量,并根据隶属度函数和模糊语言将精确量转化为模糊量;经过模糊推理,即根据if-then语言规则,生成控制作用的模糊量;该模糊量经过反模糊化生成精确的控制量作用于被控对象。
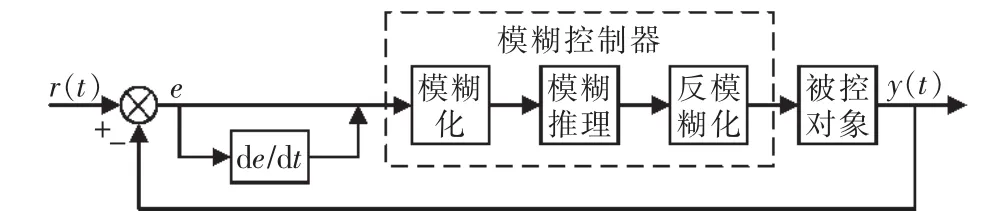
图3 模糊控制器原理图Fig.3 Schematic diagram of fuzzy control
模糊控制实质是非线性的PD控制,不存在积分环节,对具有惯性特性的被动对象,易在平衡点处出现震荡现象或存在稳态误差。鉴于PID控制鲁棒性强、结构简单、可靠性高的特点,将模糊控制算法应用于PID算法中的新算法应运而生[8]。对于本控制系统,控制原理图如图4所示。该算法是一种自适应控制算法,通过建立过热度偏差及偏差变化率与PID比例、积分、微分参数之间的模糊关系,在系统运行过程中,根据过热度偏差及过热度偏差变化率,经过模糊控制器得到参数修正量Δkp、Δki、Δkd,与原来的PID参数叠加,在线修正PID参数,可以满足不同时刻过热度偏差及变化率对控制器参数的不同要求,从而使整个系统具有良好的动、静态特性。
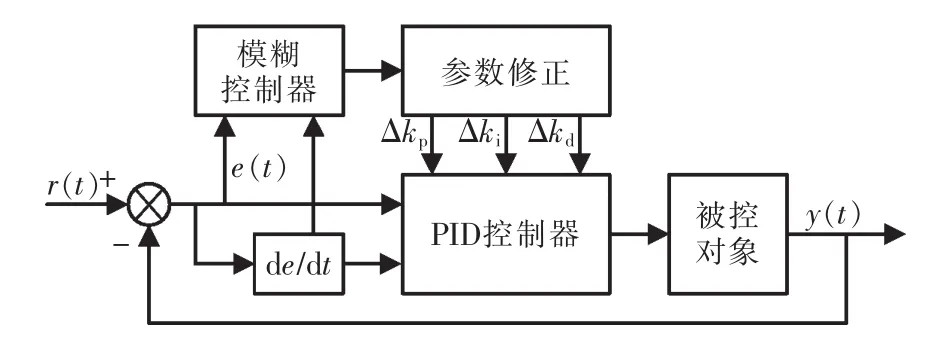
图4 模糊自适应控制算法原理图Fig.4 Schematic diagram of fuzzy adaptive control algorithm
3 电子膨胀阀的双模糊控制器算法
对于电子膨胀阀的控制,大量的研究都集中在系统稳定工作过程中电子膨胀阀的控制,很少有对启动过程中电子膨胀阀的控制算法研究。制冷机组的性能特性在启动过程和稳定运行过程是明显不同的。研究表明用常规的控制算法在启动过程对电子膨胀阀进行控制,容易导致启动过程过热度剧烈振荡[9]。
本文对电子膨胀阀的控制分为2个阶段,即制冷系统启动阶段和稳定工作阶段。在系统启动和稳定工作过程分别使用模糊控制器A和B来控制电子膨胀阀,且稳定阶段使用自适应模糊PID控制算法。控制算法流程图如图5所示。
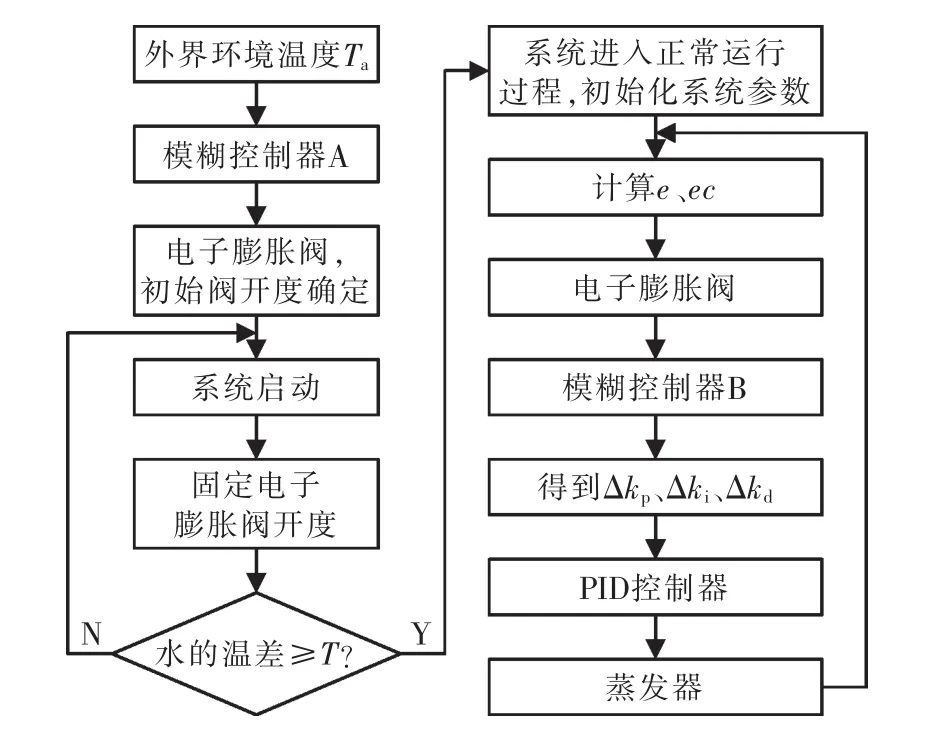
图5 系统控制流程图Fig.5 Flow chart of the system
3.1 系统启动过程电子膨胀阀的控制
启动过程中过热度不仅与电子膨胀阀的开度有关,还取决于系统的启动特性。固定阀开度的控制策略被应用在系统启动过程中。启动过程中过热度很大程度上取决于初始蒸发器中制冷剂的质量,而蒸发器中初始制冷剂的质量主要取决于外界环境温度Ta,因此选用外界环境温度作为启动过程模糊控制器A的输入,电子膨胀阀的开度作为输出量。输入和输出的模糊集都选用基于三角形隶属度函数的模糊集:{NB、NM、NS、ZO、PS、PM、PB}。模糊控制规则表如表1所示。

表1 模糊控制器A的模糊控制规则表Tab.1 Fuzzy control rules of the fuzzy controller A
实验过程中发现,对于不同的工作条件,系统的启动时间是不同的,然而水温的增量T却基本相同,因此将水温的增量,即当前水温与水的初温的差值作为系统启动过程结束的标志。
3.2 系统正常运行过程电子膨胀阀的控制
在系统启动过程结束后,压缩机两端的压差基本保持稳定,故此时蒸发器的进出口温差即过热度主要取决于电子膨胀阀的开度[10]。在此阶段使用的控制算法为自适应模糊PID控制算法。选用过热度偏差e及偏差变化率ec作为模糊控制器B和PID控制器的输入,Δkp、Δki、Δkd作为模糊控制器 B 的输出,以此来调节PID控制器的参数,最终来调节步进电机的脉冲数,达到控制阀开度的目的。模糊控制器的输入、输出变量均采用高斯隶属度函数,模糊集为{NB、NM、NS、ZO、PS、PM、PB}。其中偏差 e的隶属度函数如图6所示。
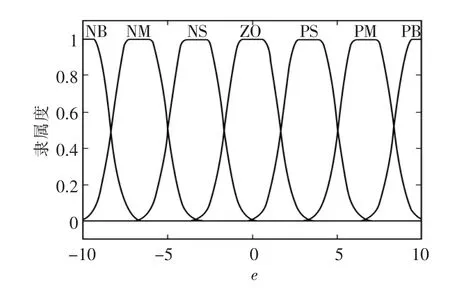
图6 偏差e的隶属度函数Fig.6 Membership function of the error e
根据己有控制系统设计经验以及参数Kp、Ki、Kd对系统输出特性的影响,总结出不同的和对参数 Kp、Ki、Kd的模糊控制规则[11]。 Δkp、Δki、Δkd的模糊控制规则如表2~表4所示。
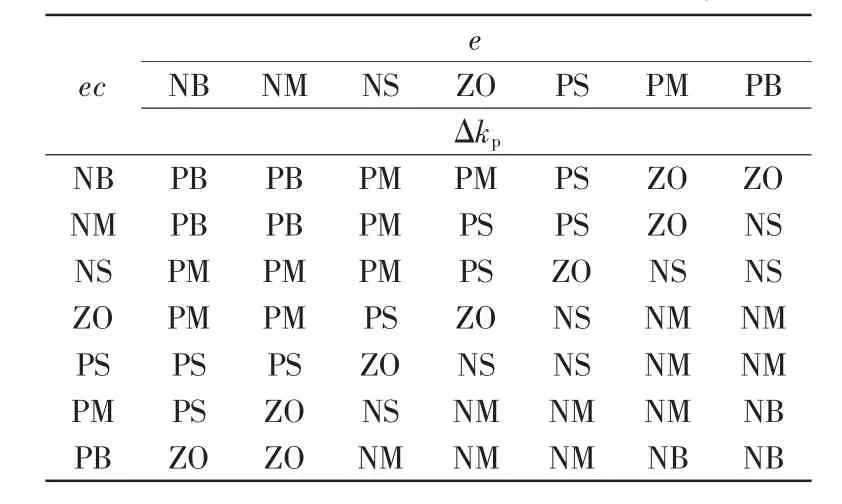
表2 Δkp的模糊控制规则表Tab.2 Fuzzy control rules of Δkp
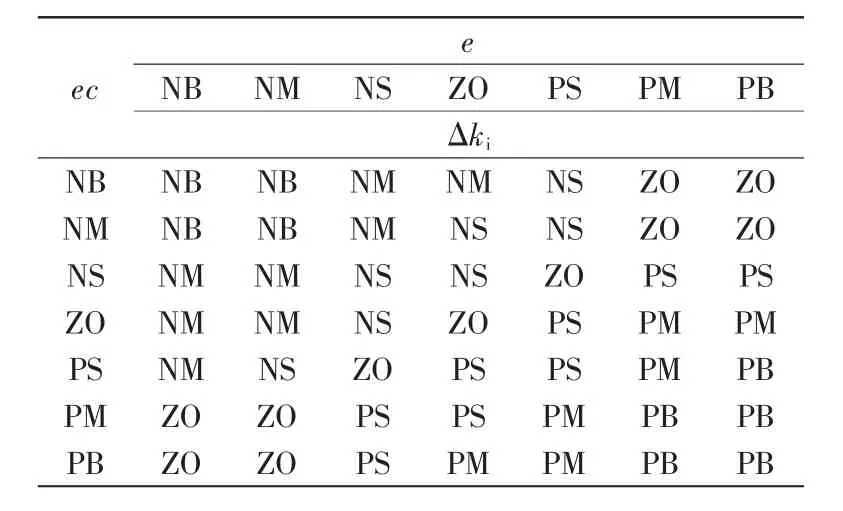
表3 Δki的模糊控制规则表Tab.3 Fuzzy control rules of Δki
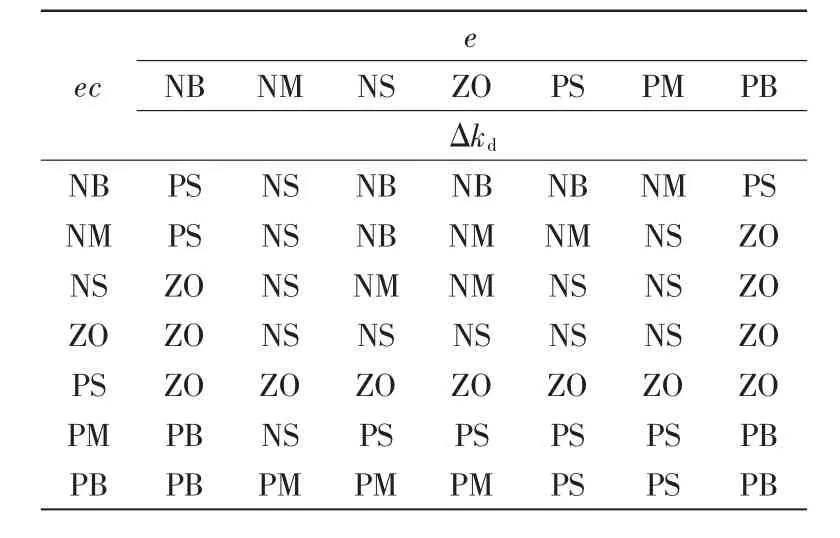
表4 Δkd的模糊控制规则表Tab.4 Fuzzy control rules of Δkd
4 实验仿真及分析
本系统实验装置选用法国泰康CAJ4511A活塞式压缩机,220 V/50 Hz,名义功率745.7 W,使用工质R12,气缸行程容积32.7 cm3。电子膨胀阀型号为DZF15,DC 12 V供电,4相步进电机驱动,1~2相励磁,驱动频率小于35 Hz,全闭到全开步数为320。仿真环境建立在Matlab仿真环境下,使用Simulink建模仿真。本文采用模糊PID控制算法,首先建立模糊控制器模型和PID控制器模型,然后将这两部分封装打包,得到最终系统的仿真模型,如图7所示。
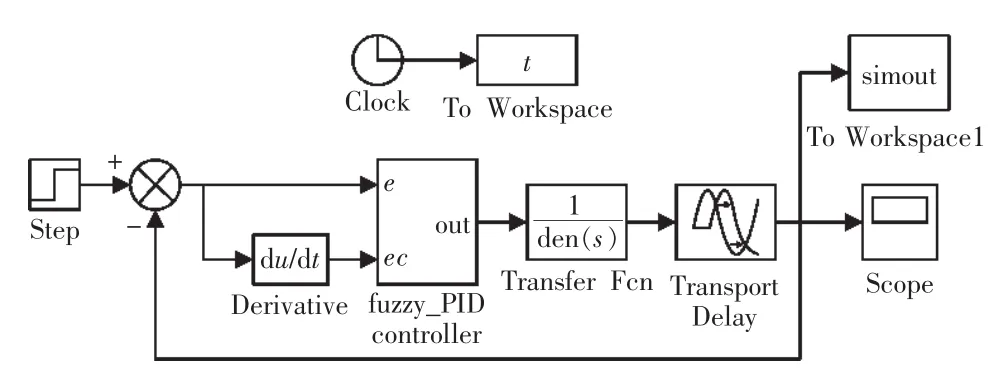
图7 系统仿真模型Fig.7 Simulation model of the system
设被控对象的数学模型为

过热度设定值为10℃,过热度偏差论域为{-6,6}、偏差变化率论域为{-1.5,1.5},Δkp、Δki、Δkd的论域分别为{-0.5,0.5}、{-0.01,0.01}、{-0.5,0.5},仿真结果如图8、图9所示。
由仿真结果可以看出模糊PID控制结果更好。使用模糊PID控制算法来控制电子膨胀阀,能够更好地控制过热度。模糊PID控制下的系统响应迅速,能够很快地达到稳态,且超调小,比PID控制算法效果更理想。
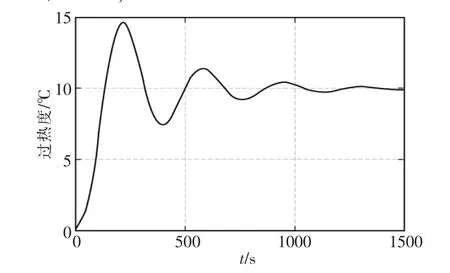
图8 PID控制仿真结果Fig.8 Simulation result of the PID control
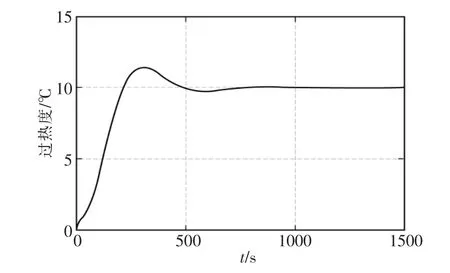
图9 模糊PID控制仿真结果Fig.9 Simulation result of the fuzzy PID control
5 结语
本文通过分析制冷系统启动特性和正常运行过程系统特性不同,将对电子膨胀阀的控制分为2个不同过程,采用双模糊控制算法,且在正常工作过程采用模糊PID控制,仿真结果表明了该算法在过热度控制上的优势,能够使系统很快达到稳态,且超调小,比常规的PID控制效果更理想,更适合电子膨胀阀的控制。
[1]邵双全,石文星,李先庭.电子膨胀阀与毛细管在变频空调系统中的性能分析[J].流体机械,2001,29(12):41-45.
[2]卢辉斌,张月强,杨雪峰.一种新型PID控制的全数字锁相环的设计与实现[J].电子技术应用,2010,36(11):56-58.
[3]张国良.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002.
[4]乔俊飞,韩红桂.RBF神经网络的结构动态优化设计[J].自动化学报,2010,36(6):865-872.
[5]姚发闪,张涛,潘海迪,等.模糊PID和变频器在导热油温度控制中的应用[J].自动化与仪表,2013,28(5):36-39.
[6]章晓龙,李征涛,陈忆喆.电子膨胀阀对蒸发器过热度稳定性的影响[J].流体机械,2014,42(4):72-75.
[7]CAO Jianpeng,Seok-Kwon Jeong,Young-Mi Jung.Fuzzy logic controller design with unevenly-distributed membership function for high performance chamber cooling system[J].J.Cent.South Univ,2014(21):2684-2692.
[8]李元贵,付焕森,曹先锋.基于模糊 PID算法的船舶锚机控制系统设计[J].自动化与仪表,2014,29(8):36-40.
[9]陈文勇,陈芝久,朱瑞琪.制冷系统启动过程电子膨胀阀的控制[J].上海交通大学学报,2002,36(2):210-213.
[10]You Yuwen,Zhang Zhigang,Guo Chunmei.Optimizing approach to varying load of the refrigeration system based on fuzzy logic control[C]//Advanced Materials Research.Switzerland:TTP,2012:6896-6901.
[11]席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008.
