基于WinCC的海上风电安装船远程监控系统设计
2015-01-27齐继阳何文灿李金燕
齐继阳,孟 洋,何文灿,李金燕
(江苏科技大学 机械工程学院,镇江 212003)
自升式海上风电安装船是海上风电场的安装设备,一方面,它可以像自升式平台一样自由升降,为海上作业提供一个安全稳定的海上工作平台;另一方面,它又可以像普通轮船一样自主航行,从而实现运输的功能。
海上风电安装船工作地点一般为近海区域,远离陆地,如何能使陆上工作人员快捷方便地监测到风电安装工作船工作状态并对其进行实时远程控制是迫切需要解决的问题[1-2]。目前的远程监控主要有2种形式。(1)设备的现场信号通过有线网络或无线网络发送给远程上位机,远程上位机在获取设备的现场信号后,经过分析处理,再通过有线网络或无线网络将控制信号发给远程设备的执行器,从而实现设备的远程监控;(2)在需要远程监控的设备上,构建由下位机和上位机组成的分布式控制系统,下位机负责对现场设备的实时控制,上位机负责发出操作指令和显示结果数据,为实现远程用户对设备的远程监控,在上位机上搭建专用Web服务器,这样远程客户就可通过Internet访问服务器,从而实现设备的远程监控。
1 远程监控系统的设计
自升式海上风电安装船主要由船体、桩腿、升降装置等组成。该船体为四桩腿式,在每个桩腿两侧各固联1根齿条,每个齿条与3个齿轮啮合,齿轮由液压马达驱动,从而实现船体升降。
其工作过程分为船体上升和船体下降2个过程:上升过程是指当船体行驶到达预定位置时,液压马达驱动齿轮使桩腿下降至海底,然后以低速对桩腿进行预压,使船体更稳定的停在预定位置,最后液压马达继续驱动齿轮旋转,此时桩腿已牢固地插入海底,不能再继续运动了。齿轮的旋转必然带动船体上升,当船体到达离海平面预定高度时,锁紧机构锁紧,船体固定在这个位置,从而为海上作业提供了一个平稳的工作平台。下降过程指当船体需要移动位置时,首先锁紧机构打开,液压马达驱动齿轮使船体降至水平面,然后慢慢从海底拔出桩腿,直至将桩腿提至预定高度,船体开始航行。整个升降过程即分为桩腿下降、预压紧、船体上升、船体下降、拔桩和提起桩腿。
2 监控系统硬件设计
2.1 总体方案设计
综合考虑成本、系统可靠性,本系统采用上节介绍的第2种远程监控的形式来实现风电安装船的远程监控。
海上风电安装船的4套升降系统分布在4个桩腿处,每套升降系统控制1个桩腿的升降。4套升降系统相对距离较远,对每一桩腿采用1个PLC对其升降过程进行控制,4个PLC通过PPI协议组成一主三从的PPI网络。以安装有WinCC组态软件的IPC作为上位机,一主三从的PPI的PPLC网络作为下位机。
2.2 上位机与下位机之间的通讯
上位机IPC中装有西门子公司的组态软件WinCC,WinCC是包括所有的SCADA系统功能在内的客户机/服务器软件,它提供的标准接口包括OPC、ActiveX、OLE和DDE服务器和客户机等接口或控件,为系统与其他应用程序交换数据提供了极大的方便[3]。WinCC对西门子公司主流PLC都能很好地支持,支持的PLC主要包括SIMATIC S5/S7/505系列的PLC,此外凡是支持 PROFIBUS DP、DDE、OPC和工业以太网协议的其他公司的PLC也能很好地支持[4]。
西门子公司的PC Access软件是专门用于S7-200PLC建立 OPC Server,OPC客户端通过访问OPC服务器从而获取S7-200 PLC的有关数据。在本项目中,上位机正是利用西门子公司的PC Access构建了主站 S7-226PLC的 OPC服务器,PC Access通过PPI通讯方式与PLC实现数据通讯。通过在WinCC的工程项目中添加OPC驱动程序通道,将WinCC作为OPC DA客户机,通过访问主站S7-226PLC的OPC服务器,实现WinCC与主站PLC的数据通讯。
2.3 下位机主站与从站之间的通讯
PPI是一个主从协议,主站向从站发出请求,从站做出应答。主站通过由PPI协议管理的共享连接与从站通讯[5]。
在该项目中,4台PLC通过PPI协议组成一主三从的PPI网络。各站分配有不同的网络地址,主站在每个扫描周期内向每个从站发出1次网络读/写请求,从站负责对主站的读/写请求做出应答,这样可有效地保证数据通讯的实时性。整个远程监控系统原理框图如图1所示。
3 监控系统软件设计
3.1 控制系统需求分析
根据海上风电安装船控制系统的需求,将其控制模式分为自动控制和手动控制2种控制模式,用户可以根据实际工作状况自由选择控制模式。自动模式即是对4个桩腿的协调控制,当船体到达预定位置时,通过船体上升或船体下降信号的输入,船体可自动实现整个上升过程或下降过程;而在手动模式中,可以对每个桩腿的升降过程独立控制而不考虑其他状态的升降情况。
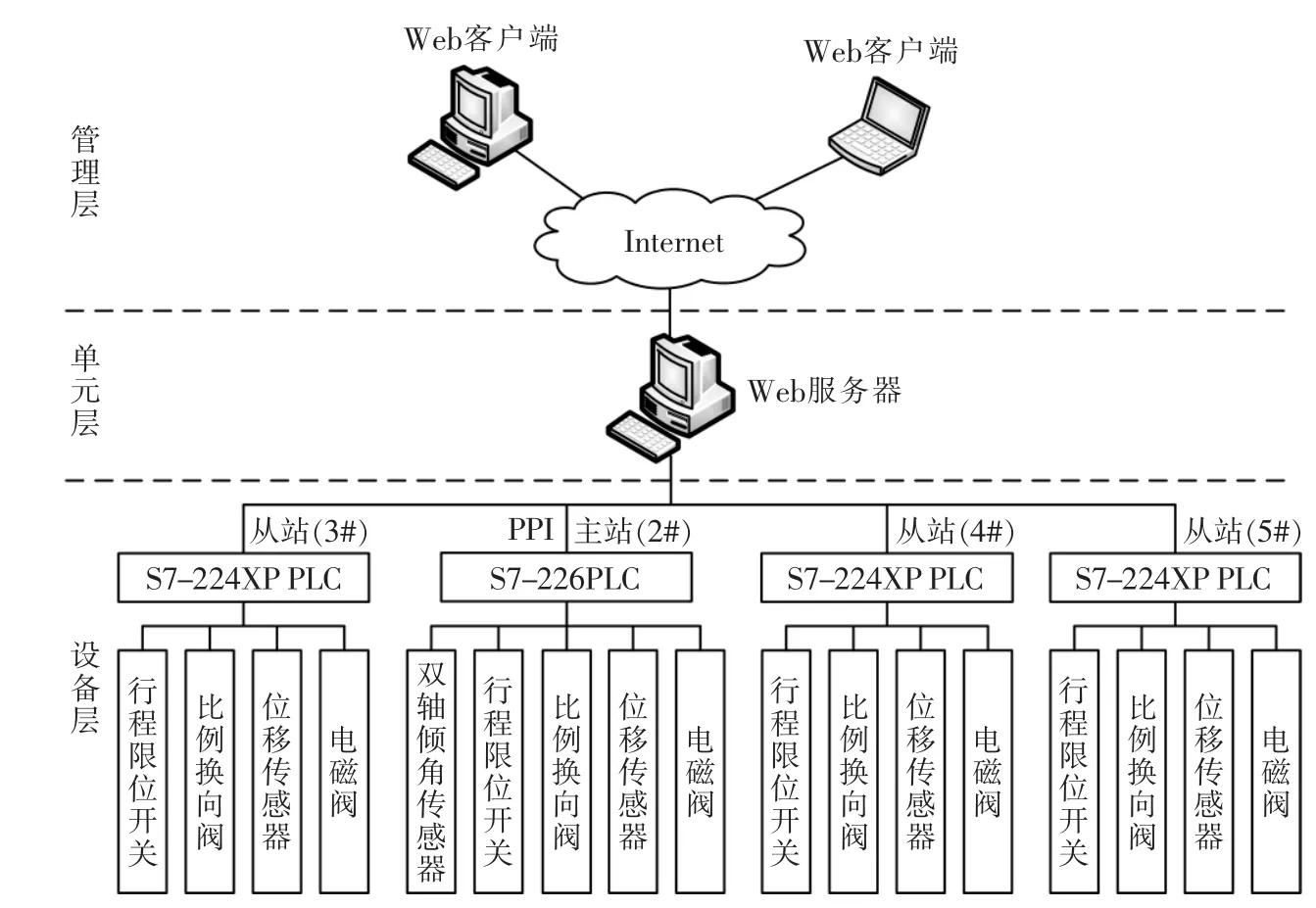
图1 控制系统原理框图Fig.1 Block diagram of control system
为保证控制操作的安全性,避免非法用户的误操作,使系统具有分级保密功能,在系统中定义了多种用户类型,对每种类型的用户,赋予了一定的操作权限,不同类型的用户对系统的访问权限是不同的,从而实现了操作区域和对象的安全性保护。
为及时发现系统运行过程中的故障,在系统中设计了报警模块,如当船体倾斜角度超过限定值,桩腿升降速度超过预先设定值时,系统会发出报警信号,提醒用户注意。为便于操作人员对系统的监测,系统设置有趋势归档模块和消息归档模块,而且数据可以电子文档的形式进行输出或打印。
3.2 下位机程序的设计
下位机共由4台PLC组成,每台PLC控制1个桩腿的升降过程,下位机选择西门子S7-200系列PLC。4台PLC通过PPI协议组成一主三从的PPI网络,主站采用西门子公司的S7-226PLC,从站采用西门子公司的S7-224XP PLC。从站负责桩腿升降过程控制,主站除了负责桩腿升降过程控制,还需根据采集到船体的倾斜信号,通知各从站调整桩腿升降速度,以减小船体的倾斜程度,主站程序流程如图2所示。
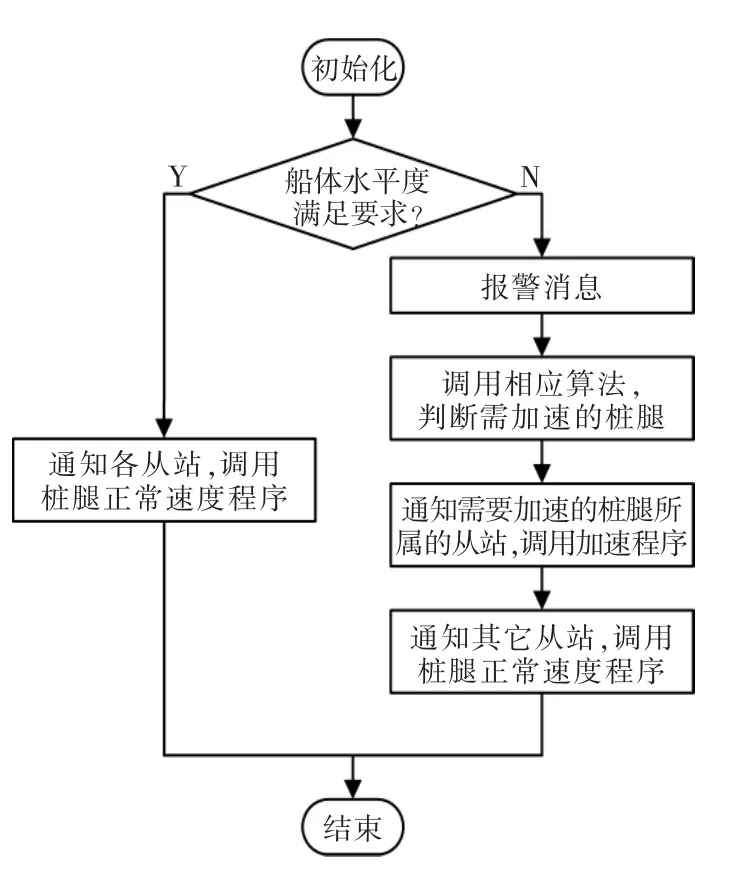
图2 主站程序流程图Fig.2 Flow chart of masterPLC program
在从站中,行程限位开关用来设定桩腿升降的极限位置,位移传感器用来获取桩腿升降的行程大小,通过比例换向阀控制液压马达的速度从而控制桩腿的升降速度,电磁阀用来锁紧机构实现对桩腿的锁紧或松开。
在主站中,除了配有行程限位开关、位移传感器、比例换向阀外,还配有双轴倾角传感器用来采集船体的倾斜角度,主站根据采集到的船体倾斜信号,运用PID算法,控制比例换向阀的开度,从而控制升降系统的运行速度。
3.3 上位机监控系统的开发
上位机监控系统的功能是显示现场设备实时信息,以及向系统发出控制指令,从而实现对整个系统的监控。在该项目中,监控系统采用WinCC组态软件进行开发。
WinCC是西门子公司提供的一款基于Windows操作系统的人机接口HMI(human machine interface)系统,其功能非常强大,而且为二次开发提供了良好的开放性,在过程通讯和过程可视化方面获得了广泛应用[6]。
WinCC的核心部分,图形编辑器的图形编辑功能十分强大,为用户高效组态和编辑各种复杂、逼真的监控画面提供了可能。监控画面上的控件分为2大类,即通用控件和专用控件,对于通用控件,可以直接调用WinCC自带的控件,如按钮、文本框等,对于专用控件,用户可以自由地利用Visual Basic或Visual C++等高级语言开发ActiveX控件,再在WinCC中调用该控件。本项目中,为实时显示船体升降过程,开发了基于Visual Basic船体升降过程的ActiveX控件,这样可使监控系统更加形象逼真。
3.4 远程发布
为使远程用户实现对海上风电安装船工作状况的远程监控,在该系统中,用于现场控制的上位机借助WinCC Web Navigator Server构建了海上风电安装船监控系统的专用Web服务器,远程端计算机只需安装有Web Navigator Client组件便可实现对该服务器的访问。
为了保证监控系统的安全管理和操作,WinCC组态软件中设置有用户管理器,在用户管理器中,可选择添加多个用户或用户组,通过对系统中所有对象和画面都分配一个权限,把相应的权限分配给不同的登录人员,使其只能操作特定的画面和对象,从而实现了操作区域和对象的安全性保证。
4 实验测试
为验证该设计方案的正确性,开发了一套自升式海上风电安装船原型系统,该模型按1∶80的比例缩小制成,如图3所示。控制系统以PC机作为上位机,4个SIMATIC S7-200系列PLC作为下位机。上位机中安装有WinCC组态软件及Web Navigator Server组件,远程端PC机安装有Web Navigator Client组件。远程用户访问海上风电安装船监控系统的Web服务器,从而实现对海上风电安装工作船远程监控,操作画面如图4所示。
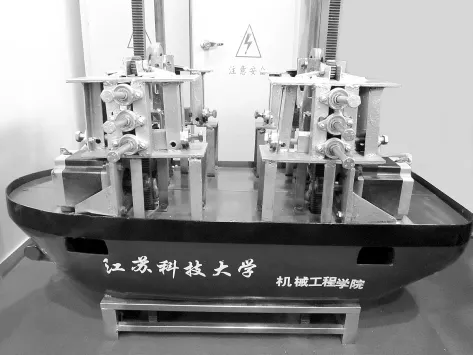
图3 船体实物模型Fig.3 Physical model of the vessel
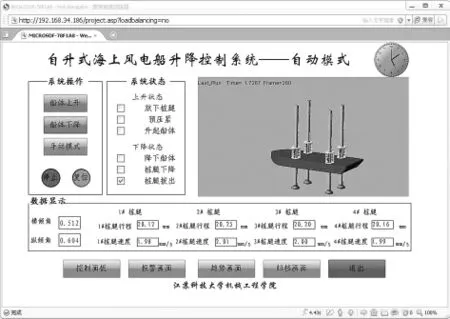
图4 远程监控画面Fig.4 Screen of remote supervisory control
在该实验过程中,远程用户能够方便地实现对风电安装船模型的升降控制,并且能实时地监视风电安装船模型的运行状况,系统运行可靠。
5 结语
风电安装船的工作地点一般为海水区,工作环境恶劣,工作站点分散,且岸上人员无法及时观测到系统运行信息,因此,开发其远程监控系统不仅改善了操作人员工作环境及人力资源浪费问题,并且为风电安装船的安全工作提供了有力保证。
该系统以IPC作为上位机,西门子S7-200系列PLC作为下位机,在下位机中,PLC之间通过PPI协议构建了一主三从的PPI网络,为实现PLC与上位机之间的通讯,采用PC Access搭建了下位机主站PLC的OPC服务器,以WinCC组态软件开发了上位机的监控系统,通过WinCC的组件WinCC Web Navigator Server构建了监控系统专用服务器,远程客户端的PC机只需安装有 Web Navigator Client组件,便可实现对该服务器的访问,从而实现了远程操作人员对海上风电安装船的远程监控,在改善操作人员工作环境的同时,也减少人力物力资源浪费、提高了工作的效率。
[1]Michler-Cieluch T,Krause G,Buck B H.Reflections on integrating operation and maintenance activities of offshore wind farms and mariculture[J].Ocean&Coastal Management,2009,52(1):57-68.
[2]Simon-Philippe Breton,Geir Moe.Status,plans and technologies for offshore wind turbines in Europe and North America[J].Renewable Energy,2009,34(3):646-654.
[3]甄力东.西门子WinCC基础与应用[M].北京:机械工业出版社,2011.
[4]梁飞,何黎明,田作华.基于WinCC和OPC的远程监控配料生产系统[J].微型电脑应用,2010,26(11):51-53.
[5]向晓汉,陆彬.西门子PLC工业通信网络应用案例精讲[M].北京:化学工业出版社,2011.
[6]苏昆哲.深入浅出西门子WinCC V6[M].北京:北京航空航天大学出版社,2008.
