无人机结冰探测器仿真研究
2015-01-25熊海霞袁冬莉张正明
熊海霞,袁冬莉,张正明
(西北工业大学 自动化学院,陕西 西安 710129)
结冰探测器为无人机环境控制系统的重要组成部分,其主要是用来为无人机提供结冰告警信号。特定气象条件下,在飞机的升力表面(如机翼、螺旋桨和旋翼、发动机进气道、挡风玻璃、外露传感器等)迎风表面会产生水分凝结成冰的现象。当发生轻度结冰时,会使飞机升阻比大幅下降,进而造成飞行姿态控制困难,严重结冰时可能造成飞机操纵翼面发生失效[1]。所以在飞机上安装结冰探测器为飞机结冰情况提供预警信号,具有重要意义。
在无人机的开发过程中,往往是硬件和软件设计并向进行,这样可以大大缩减研制周期。而在软件的开发过程中又需要硬件的接口数据,这就要求在硬件成形之前就要有数据输出,建模仿真为此提供了很好的解决方法。文中建立了无人机结冰探测器的数学模型,为无人机控制软件的设计与调试提供了重要的数据,缩短了飞机的开发周期。
1 结冰探测器介绍
结冰探测器探测飞机的结冰情况,对结冰速率进行实时解算,输出结冰告警信号、结冰速率信号和结冰探测器故障信号。
结冰探测器由敏感部件、解算部件组成。解算部件给敏感部件提供激励信号,敏感部件的探头在激励信号和位于敏感部件上的电磁系统作用下,产生稳定的振动即工作频率。当有冰沉积到敏感部件的探头上时,其质量变化,从而使工作频率降低。解算部件根据频率的变化,判定探头上已有冰层的厚度,解算结冰速率。
结冰探测器具有自身加热除冰的功能,输出结冰速率信号后,自身电加热除冰。图1给出了结冰探测器的结构框图。
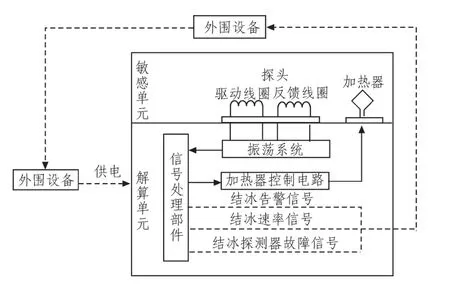
图1 结冰探测器结构框图Fig.1 Structure diagram of the icing probe
为了建模方便需要对结冰探测器的物理框图进行简化,如图2所示,将结冰探测器的数学模型简化为4部分:结冰模拟、探头频率模拟、加热模拟、结冰厚度解算。模型的输出为结冰速率信号、结冰告警信号、结冰探测器故障信号。

图2 结冰探测器简化框图Fig.2 Simplified structure diagram of the icing prob
2 结冰探测器模型
2.1 结冰模拟模块模型
该模块模拟结冰过程,其中rate模拟当前环境中探头的结冰速率,heating模拟加热除冰过程,thick模拟结冰厚度。当结冰厚度达到1 mm或结冰厚度达到0.5 mm超过60 s时,heating为1,模拟给探头加热除冰。探头结冰厚度初始值为0,结冰厚度后面的饱和环节设置了结冰厚度的限定值,当前设置的上限值为2.5 mm (由于在探头厚度达到1 mm后,探头即加热除冰,且探头加热功率达到300 W,因此探头处的结冰厚度并不会达到2.5 mm),下限值为0 mm。如图3所示为结冰模拟模块结构。
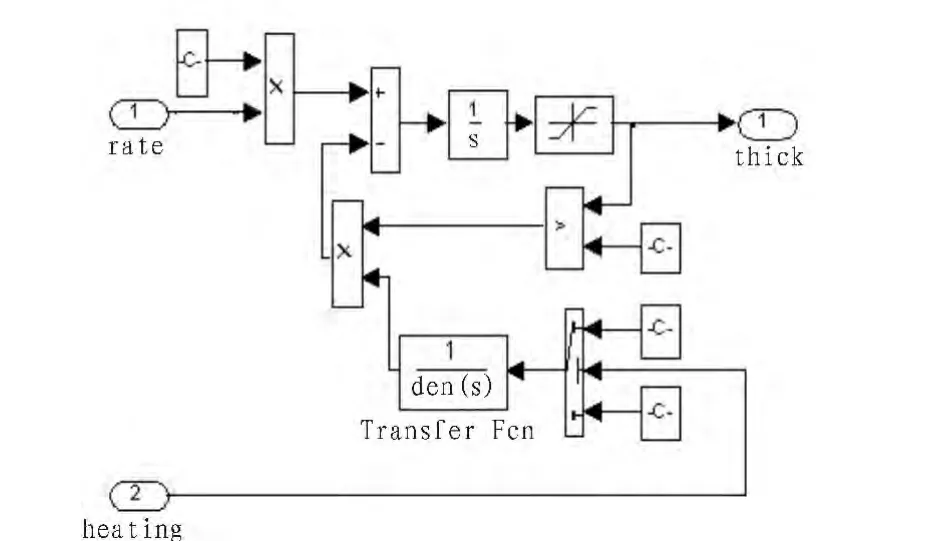
图3 结冰模拟模块Fig.3 Structure diagram of icing
2.2 加热模块模型
该模块在符合要求的条件下模拟给探头加热除冰,其中iceThick为输入模拟结冰厚度,heat为输出模拟加热功能。加热10 s后,若结冰厚度仍超过0.5 mm且持续60 s或结冰厚度达到1 mm,则对探头继续加热,否则,结束加热。如图4所示。

图4 加热模块Fig.4 Structure diagram of heating
2.3 探头频率模拟模块模型
该模块模拟结冰探测器探头对应不同结冰厚度下的输出频率[2],其中frequency为输出模拟探头频率。如图5所示。

图5 探头频率模拟模块Fig.5 Structure diagram of the probe
2.4 解算结冰速率模块模型
该模块模拟根据不同输出频率解算结冰厚度,同时该模块实现以下功能:
1)探头处结冰厚度达到0.5 mm时,输出结冰告警信号;
2)达到1 mm后输出结冰速率信号;
3)加热结束后60 s内结冰厚度未达到0.5 mm,告警信号结束,告警信号结束的同时不再输出结冰速率信号。
图6为解算结冰速率模块结构,其中frequency和heat为输入,thickness、icewarn、iceRate为输出分别代表解算出的结冰厚度、结冰告警和解算出的结冰速率。iceRateTest模块模拟解算结冰速率后的输出装置。
3 模型仿真实现
当初始结冰速率为0.8 mm/s并在400 s时结冰速率转换为2 mm/s,仿真曲线如图7所示。
图7中,当结冰速率为0.8 mm/s时,结冰63 s后,结冰厚度达到0.5 mm,此时结冰探测器告警信号变为1,发出结冰告警信号。但由于此时结冰厚度未达到1 mm,所以未输出结冰速率信号。在123 s时,结冰厚度达到0.5 mm以上已经持续60 s,此时结冰探测器开始加热除冰。在126 s时,结冰厚度下降到0.5 mm以下,结冰告警信号并未立即消失,而是在186 s即60 s后消失。在400 s时,结冰速率由0.8 mm/s变为2 mm/s。由于结冰厚度达到1 mm,所以当结冰速率为2 mm/s时,输出结冰速率信号为2 mm/s。在421.5 s时,结冰厚度在加热后降为0.5 mm以下,但当478 s时,结冰厚度又达到了0.5 mm以上,由于时间间隔未到60 s,所以结冰告警信号一直未消失。同时由于结冰速率增大,结冰加快,所以结冰探测器加热频率增快。
4 实时仿真
4.1 实时仿真平台组成
结冰探测器仿真系统包括:两台PC机、两台工控机[3-4]。一台PC机运行LabVIEW[5]控制界面,另一台PC机运行LabV IEW显示界面。一台工控机运行结冰探测器模型,另一台工控机运行实现控制功能的软件,这两台工控机的操作系统均为VxWorks。实时仿真系统的具体构成如图8所示。

图6 解算结冰速率模块结构Fig.6 Structure diagram of icing rate
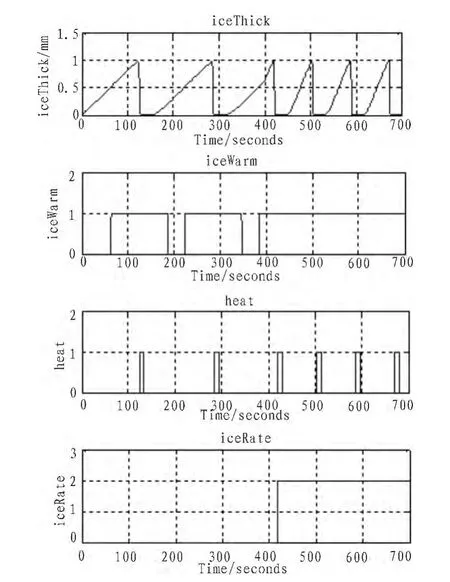
图7 结冰探测器仿真曲线Fig.7 Simulation results of the icing probe

图8 实时仿真系统Fig.8 Real-time simulation system of the icing probe
两台PC机在XP系统下分别运行LabVIEW编写的控制界面和显示界面,控制界面用来输入控制指令,这些控制指令通过以太网传输到两台工控机中;显示界面用来显示模型的运算结果,显示界面可以查看模型结果是否符合预期要求。两台工控机均搭载VxWorks操作系统,分别为模型机和控制软件机,模型机上运行的是在Simulink环境下建立的并经过RTW下载技术生成的结冰探测器数学模型可执行代码;控制软件机运行的是对模型进行控制和故障处理的软件。
4.2 文件配置
由于软件需要与多个外部系统进行收发数据的交互,故该仿真平台采用UDP通信实现两台PC机与两台工控机间的数据通信。
为了能够将建立好的仿真模型顺利转化为可加载的目标文件,需要对RTW以及Tornado做相应的设置,不同MATLAB版本的配置过程可能会略有区别,本文使用的是MATLAB R2012a版本,配置过程见参考文献[6]。
5 结 论
本文通过对无人机结冰探测器功能和部分实验数据的分析,建立了结冰探测器的Simulink模型能够较好的模拟出无人机结冰探测器的工作特性。以搭载由VxWorks嵌入式实时操作系统的ARK-5260工控机和XP操作系统的PC机为仿真平台,并利用RTW下载技术将建立的Simulink模型下载到工控机中实现了对无人机结冰探测器的实时仿真,其仿真结果在LabVIEW显示界面中进行实时显示,此仿真平台很好的模拟了结冰探测器的功能,为类似仿真提供了一定的参考。
[1]蒋天俊.结冰对飞机飞行性能影响的研究[M].南京:南京航空航天大学,2008.
[2]王颖.压电谐振式结冰传感器数学模型研究 [M].武汉:华中科技大学,2006.
[3]鲍泳林,袁冬莉,张宇坤.某型飞机燃油系统交输供油功能实时仿真[J].科学技术与工程,2012,20(25):6390-6394.BAO Yong-lin,YUAN Dong-li,ZHANG Yu-kun.Real-time simulation of the cross-feed function of one aircraft fuel system[J].Science Technology and Engineering,2012,20(25):6390-6394.
[4]张正明,袁冬莉,吕鹏.某型无人机液冷装置的实时仿真[J].电子设计工程,2013,21(15):1-3.ZHANG Zheng-ming,YUAN Dong-li,LV Peng.Real-time simulation of the liquid cooling system of one UAV[J].Electronic Design Engineering,2013,21(15):1-3.
[5]杨乐平.LabVIEW高级程序设计[M].北京:清华大学出版社,2003.
[6]张正明.无人机燃油、环控系统仿真与机电软件设计[M].西安:西北工业大学,2014.