改进Potter算法在冗余捷联惯组故障检测中的应用研究
2015-01-25李晓亮任子君符文星
李晓亮,任子君,符文星
(西北工业大学 航天学院,陕西 西安 710072)
航天应用对惯性器件的可靠性提出了非常高的要求。采用冗余配置的方式可以有效的提高惯性导航系统的可靠性,采用冗余配置的传感器容错能力较强。然而,当传感器出现故障时,若不及时的找出并隔离故障器件,那么故障信息将会进入导航系统,最终影响导航精度,严重时会导致发射失败的后果。因此,冗余惯组必须进行故障检测,监视其工作状态,及早发现故障并隔离。
关于捷联惯组的故障检测算法,国内外已有很多学者进行研究。Daly K.C.等提出的广义似然比法,金宏,张洪钺提出的最优奇偶向量法,Duk-Sun Shim等提出的奇异值分解法。
对于采用斜置冗余配置的捷联惯组,常采用广义似然比法进行故障检测。然而,对于本文采用的备份冗余的捷联惯组配置,能否采用广义似然比法进行故障检测仍需要进行仿真验证。
1 基于广义似然比法的故障检测
1.1 广义似然比法
m个传感器测量方程

式中:X∈R3是待测的导航状态(三轴加速度或角速率);Z∈Rm是 m 个传感器的测量值(m≥3);H(m×3)是传感器配置的几何矩阵;ε是高斯白噪声。
定义如下奇偶方程:

式中p为奇偶向量,解耦矩阵V是待定行满秩矩阵。
为使奇偶向量p独立于待测状态X而仅与噪声ε或可能的故障有关,所设计的V阵应满足:VH=0
则可定义判决函数DFD为:

E{εεT}=σ2I,由 VVT=I,可简化为

隔离判决函数为:

式中,vj是矩阵 V 的第 j列。 分别计算 DFIj(j=1,2,…m),找出最大的DFIk,那么认为第k个传感器是发生故障。
1.2 冗余捷联惯组
论文研究的冗余捷联惯组为三捷联惯组系统,安装方式见图1。由三套相同的捷联惯组(AxAyAz,BxByBz和CxCyCz)同轴同向安装,每套惯组都是常规的三正交安装体系。可以认为是3个正交轴(x轴,y轴,z轴)上都安装了3个相同的传感器。
几何安装矩阵可以按两种方式取:
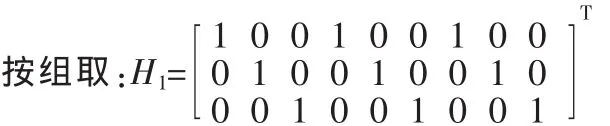

图1 三捷联配置方式Fig.1 Configuration of nine gyro Input axes

后续部分会讨论:H矩阵的编排对检测效果的影响。
2 仿真试验
2.1 Potter算法
采用实测飞行数据作为惯组所测量的飞行器真实状态,试验流程图为:

图2 仿真试验流程图Fig.2 Block diagram of simulation
根据Potter算法,可由几何安装矩阵H1算得相应的解耦矩阵 V1:

判决函数服从自由度为6的中心卡方分布,给定虚警率1%,查卡方分布表得门限TD=16.812。
在30秒处给第7个陀螺加入5σ幅值的偏差故障。
无故障时故障判决函数如图3,由于实验数据中野点的干扰,在某些时刻有超过门限的现象但很快又消失,对于野点的干扰可采取表决法来排除。例如:连续的5个采样点中有3个超出门限值,则认为发生了故障。

图3 无故障时故障判决函数Fig.3 Decision function without fai1ure
故障时如图4所示,在第30秒处判决函数值已跃至门限,并且表决通过,则认定发生陀螺故障,故障可正确检测出。

图4 30秒处故障的判决函数Fig.4 Decision function with a bias fai1ure at 30 seconds
检测出故障后马上转入故障隔离,故障隔离判决函数DFi幅值最大的即为故障陀螺,从图5中可知从第30秒开始,7号陀螺的隔离判决函数明显的超过了其它陀螺的函数值,由准则可判断出故障陀螺为7号。发生故障的陀螺已正确检出。检出故障陀螺后,就要将故障陀螺隔离。方法是将H矩阵中故障陀螺的对应行删除,并重新计算解耦矩阵V。

图5 隔离判决函数Fig.5 Isolation function of the nine gyro
当故障幅值为2σ时,由仿真得知,由于故障幅值较小,故障信号已淹没在陀螺噪声中,故障检测函数并未发生明显变化,GLT方法已不能正确检测出陀螺故障。
2.2 改进Potter算法
当选取几何安装矩阵H2时,根据Potter算法,可算出对应的解耦矩阵V2:
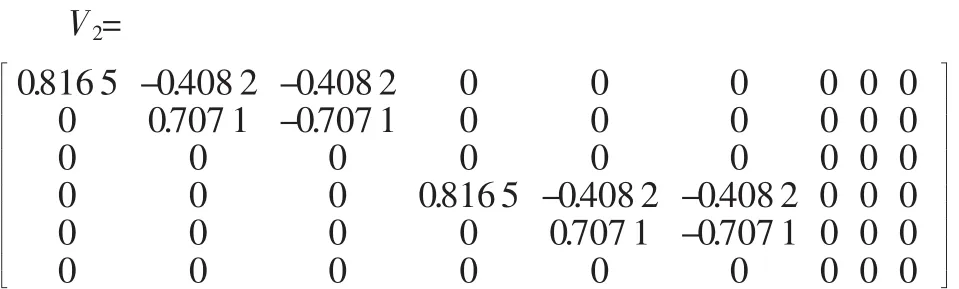
因为V矩阵中的全零行对检测无作用,去掉全零行得:

此时,V3仍然满足:VH=0 和 VVT=I。
经仿真试验可知:对于解耦矩阵V2和V3,故障检测和隔离的性能相同;但都存在缺陷,即只能检测出前6个陀螺的故障,不能检测出最后3个陀螺的故障。分析原因知:V3(V2)的最后3列元素全零,与测量值Z相乘后,导致奇偶向量p中不再包含最后3个陀螺的信息,故而不能检测出最后3个陀螺的故障。解决方法是:改进Potter算法,重新计算解耦矩阵V。
满足下述方程组的矩阵V即可作为解耦矩阵:
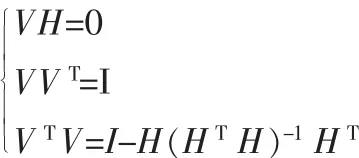
由于GLT隔离算法会选择隔离最大的DFIj,因此,矩阵VTV的对角元素尽可能大,其余元素尽可能小。文献[3]中指出,满足VTV=I-H(HTH)-1HT的矩阵V即可保证好的隔离性能。
利用改进算法求得的解耦矩阵V为:
仿真试验结果显示:利用V4可以进行故障检测与隔离,效果和 V1(H1)接近。

3 结 论
文中利用广义似然比法,针对特定的冗余捷联惯组配置,进行了仿真试验。证明了广义似然比法不仅可以应用在常规的斜置冗余捷联惯组配置上,而且可以应用在成套备份的冗余捷联惯组配置上。
不同的传感器配置几何矩阵H(传感器编排顺序),Potter算法得到不同的解耦矩阵,会带来不同的故障检测效果。
[1]Kevin C Daly,Eliezer Gai,James V Harrison.Generalized Likelihood Test for FDI in Redundant Sensor Configurations[J].Guidance and Control(S1057-4932),1978,2(1):9-17.
[2]Potter J E,Suman M C.Thresholdless Redundancy Management with Arrays of Skewed Instruments[J].AGARDOGRAPH-224,Integrity in Electronic Flight Control Systems,1977(15):1-25.
[3]Harrison J,Gai E.Evaluating Sensor Orientations for Navigation Performance and Failure Detection[C]//IEEE Transactions on Aerospace and Electronic Systems,1977.
[4]秦永元,张洪钺,汪淑华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,2012.
[5]秦永元.惯性导航[M].北京:科学出版社,2006.
[6]贾鹏,张洪钺.基于冗余惯性组件故障诊断方法的比较研究[J].系统仿真学报,2006,18(S2):274-278.JIA Peng,ZHANG Hong-yue.Comparative research of fault detection methods based on redundant inertial measurement unit[J].Journal of System Simulation,2006,18(S2):274-278.