改进的箔条干扰极化识别方法∗
2015-01-22
(电子信息系统复杂电磁环境效应国家重点实验室,河南洛阳471003)
0 引言
箔条干扰[1]是使用最为广泛的无源干扰之一,飞机和舰船等军事目标都经常投放箔条弹以对抗来袭的导弹[2-3]。从箔条投入之初就一直有人对其进行雷达散射特性[4-8]和对抗方法[9-18]的研究。箔条的大量使用对雷达的性能提出了严重挑战,如何对抗箔条干扰是雷达面临的重要问题之一。
极化信息是电磁波除时域、频域和空域信息以外的又一可资利用的重要信息,利用极化信息对抗箔条干扰很早就有人开展相关研究[13-18],其中当箔条干扰和目标不可分辨时,通常采用极化滤波的方法[13],当箔条干扰和目标可分辨时,通常采用极化识别的方法[14-18]。文献[14-17]给出的极化识别方法得到了广泛应用,这些极化识别方法针对的是未配重的箔条干扰,采用垂直极化发射,用垂直和水平极化双极化接收,基于两极化通道幅度比来识别箔条干扰和舰船目标。箔条生产加工技术的进步,使得通过配重技术以控制箔条干扰的取向成为可能,原有的极化识别方法在对抗新型配重箔条干扰时的识别性能无法令人满意。
本文正是基于此背景,对利用极化信息的箔条干扰识别方法进行了改进。首先对配重箔条干扰的取向统计模型进行了介绍,基于此对配重箔条干扰的极化统计特性进行了研究,指出了原有方法识别箔条干扰时存在的问题。基于配重与未配重箔条干扰的全极化特性,对原有的极化识别特征量进行了改进,提出了一种改进的箔条干扰极化识别方法。通过计算机仿真对各情况下改进方法和原有方法的性能进行了对比,证明了对配重后的垂直取向箔条干扰,原有方法基本上无法正确识别,而改进方法较原有方法具有更强的适用性,对各种类型的箔条干扰都能以较高的概率正确识别。
1 配重箔条的极化特性分析
1.1 配重箔条干扰的取向统计模型
假设箔条的形状为细长圆柱形,则箔条的取向d可以用(θd,ϕd)表示,其中θd∈[0,π]表示箔条姿态的俯仰角,ϕd∈[0,2π]表示箔条姿态的方位角。没有配重的箔条散开后,可以认为姿态服从均匀分布,均匀分布时箔条姿态(θd,ϕd)的概率分布密度函数为

箔条生产加工技术的进步,使得通过配重技术可以控制箔条干扰的取向。经过配重后,箔条的取向表现为俯仰向上集中于某一特定的角度,可以假设其取向的概率分布为:方位角(也即ϕd)在0~2π范围内服从均匀分布,θd的概率分布为相对集中于某一倾角θc以及一定的分散程度(也即方差D2)。对箔条而言,θd的概率分布总是关于θd=π/2水平面上下对称的,于是可以用“θd在[0,π]范围内以倾角θc和π-θc为中心服从方差为D2的正态分布”来近似描述箔条取向仰角的概率分布。因此,箔条空间取向的概率密度函数[6]可以表示为

1.2 配重箔条干扰的极化特性分析
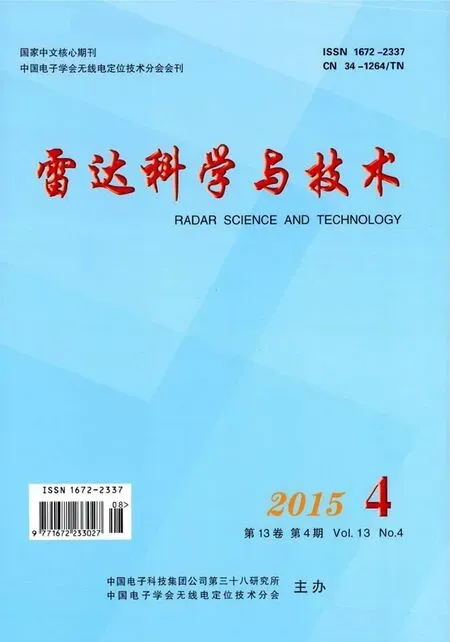
假定雷达视线方向(LOS)位于水平面内,建立如图1如示的雷达散射坐标系,箔条轴向在雷达散射坐标系下的姿态用(θ,ϕ)表示,则可以认为θ=π/2-θd,ϕ=ϕd。箔条轴向与雷达视线的夹角为Θ。将箔条等效为半波偶极子,则箔条的极化散射矩阵[8]为
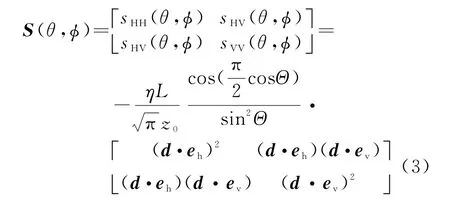
式中,L为半波偶极子的等效长度,η=120πΩ为自由空间的特性阻抗,z0为偶极子的散射阻抗,cosΘ=cosθcosϕ,d·eh=cosθsinϕ,d·ev=sinθ。
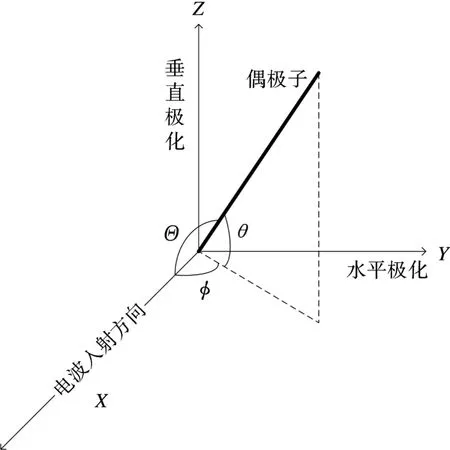
图1 雷达散射坐标系
箔条云由大量姿态不同的箔条偶极子构成,根据大数定理,可知箔条云单个极化通道的幅度服从瑞利分布,RCS服从指数分布,且箔条云极化散射矢量k=[SHHSVVSVH]T服从零均值的复高斯分布,其协方差矩阵为


式中,〈·〉为对箔条的所有可能的姿态求平均,N为箔条的数目。利用数值积分可以得到箔条各极化通道的平均RCS。
由图2可以看出,当D很大时,箔条的分布趋于均匀分布,此时θc的大小对各极化通道平均RCS的影响较小,当D较小时,箔条的平均RCS随θc起伏较大。当θc趋于90°时,箔条的取向分布接近水平,此时H H通道箔条的平均RCS达到最大,当θc和D趋于0°时,箔条的取向接近垂直,此时垂直极化通道箔条的RCS达到最大,σVV越来越大,σHV越来越小逐渐增大。
原有的极化识别方法没有考虑箔条的配重,采取双极化体制,发射极化为垂直接收,用垂直极化和水平极化来接收,原有识别方法的特征量为

舰船的极化散射以平板和二面角为主,电磁计算和实测数据皆表明:舰船目标同极化通道的回波幅度远大于交叉极化通道,即

也就是说,舰船目标的特征量ρ1一般较大,如果箔条干扰未配重的话,其特征量ρ1一般较小,但是箔条配重后,当D较小且θc趋于0°时,ρ1较小的结论将不再成立,这意味着对于配重箔条,如果能够将箔条的取向集中于垂直,则先前的极化识别方法将会识别错误,误将该类型的箔条识别为舰船。下面将提出一种改进的极化识别方法,以保证箔条极化识别方法的稳健性和普适性。
2 改进的箔条干扰极化识别方法
2.1 改进的极化识别方法
图2 各极化通道平均RCS随θc和D变化的三维图
舰船目标和箔条干扰的结构组成存在很大差异:舰船的结构以铁板组成的平面散射和两块铁板组成的两面角散射为主,箔条干扰是由大量数目的箔条丝组成,箔条的取向分布对箔条云团的散射特性具有重要的决定作用。由于单根箔条的散射波是线极化波,而线极化的方向仅与箔条的取向有关,所以无论箔条是否进行配重,取向为何类型,也无法使得两个同极化通道和交叉极化通道的回波RCS比值(即)同时很大,但对舰船目标,两者同时较大。基于该差异,提出改进的箔条识别方法。
图3 ρ2随θc和D变化的三维图
从图3可以看出,ρ2的取值不超过3,这说明无论箔条的取向为何类型,也无法使得同时很大,但对舰船目标两者同时较大。因此可以将雷达导引头体制由双极化体制改为全极化体制,在此基础上对原有极化识别方法进行改进,将识别特征量修正为

2.2 改进方法和原有方法的性能对比
假设舰船的极化回波矢量服从零均值的复高斯分布,即箔条和舰船的分布形式相同,只是极化协方差矩阵中元素的取值不同。假设舰船的极化协方差满足如下:

由于同极化通道之间的相关性,导致难以对改进方法的识别性能进行理论分析,本文采取计算机仿真对改进方法和原有方法的识别性能进行比较分析。选取几种典型的箔条取向分布参数,进行仿真分析。根据上一节的数值积分结果可以得到箔条云极化协方差矩阵的元素取值,如表1所示,同时表1中也给出仿真时舰船目标极化特性的参数设置。基于表1中的参数进行仿真分析。由于式(6)和式(8)给出的识别特征量的取值范围较大,不便于分析,所以对识别特征量进行非线性变换(可以证明,该变换为单调递增函数,不影响识别概率),令


表1 箔条和舰船极化特性仿真参数设置
用H0假设表示雷达目标为箔条,用H1假设表示雷达目标为舰船,根据统计检测理论可知,假设识别特征量为T,识别性能主要取决于p(T|H0)和p(T|H1)。p(T|H0)和p(T|H1)差别越大,识别性能越好。利用连续5个脉冲的回波,基于计算机仿真得到典型取向分布箔条干扰和舰船目标的识别特征量的统计分布p(T1|H0)、p(T1|H1)、p(T2|H0)、p(T2|H1),如图4所示,图中实线表示舰船,虚线为箔条干扰,分别对应假设H0和H1,每幅子图的左边为原有方法,识别特征量为T1,右边为改进方法,识别特征量为T2,图4(a)、(b)、(c)分别对应为箔条取向服从均匀分布、水平分布和垂直分布的情况。
图4 典型取向分布箔条干扰和舰船目标的识别特征量的统计分布
通过图4可以看出,对原有方法,水平分布时p(T1|H0)、p(T1|H1)差别明显大于其他三种分布,这说明原有方法对水平分布的识别性能较好,但垂直分布时,原有方法得到的p(T1|H0)、p(T1|H1)差别很小,即对垂直分布箔条云,原有方法得到的特征量,箔条云和舰船目标的可分性较差。通过图4(c)可以看出,改进方法得到的特征量舰船和箔条的可分性明显强于原有方法。对其他的几种分布形式,原有方法和改进方法得到的特征量,舰船和箔条的可分性大致相当,在图4中的区别不大。根据5个脉冲的回波,选择相应的识别门限,使得对舰船的识别率为99%,对箔条干扰进行识别,识别结果如表2所示。
_表2 原有方法和改进方法的识别性能对比
由表2可以看出,对垂直分布的箔条干扰,原有方法的识别率只有0.8%,但改进方法的识别率达到99.8%,对均匀分布和水平分布,改进方法的识别率和原有方法相当。这说明了本文提出的改进方法能够对各种类型的箔条进行识别,较原有方法具有更强的适应性。
3 结束语
本文基于配重箔条的极化特性分析,提出了一种箔条极化识别的改进方法,通过计算机仿真证明了改进方法较原有方法具有更强的适应性。当然,识别性能的提高需要以雷达极化信息的获取为基础,必须由双极化体制改为全极化体制。另外,本文的分析主要是基于计算机仿真,对舰船统计特性的假设也比较简单,这些都有待于在下一步工作中改进。
[1]陈静.雷达箔条干扰原理[M].北京:国防工业出版社,2007:1-40.
[2]焦淑瑜,盖添.火控雷达抗无源干扰能力试验与评估[J].雷达科学与技术,2013,11(2):141-144,149.
[3]蒋志彪,骆鲁秦,李鑫,等.机载箔条弹投放系统作战效能评估[J].雷达科学与技术,2013,11(3):246-250.JIANG Zhi-biao,LUO Lu-qin,LI Xin,et al.Operational Effectiveness Evaluation of Airborne Chaff Cartridge Delivery Subsystem[J].Radar Science and Technology,2013,11(3):246-250.(in Chinese)
[4]PANDEY A K.Modeling and Simulation of Chaff Cloud with Random Orientation and Distribution[C]∥IEEE MTT-S International Microwave and RF Conference,New Delhi,India:IEEE,2013:1-4.
[5]SEO D W,NAM H J,KWON O J,et al.Dynamic RCS Estimation of Chaff Clouds[J].IEEE Trans on Aerospace and Electronic Systems,2012,48(3):2114-2127.
[6]MARCUS S W.Dynamics and Radar Cross Section Density of Chaff Clouds[J].IEEE Trans on Aerospace and Eletronic Systems,2004,40(1):93-102.
[7]TANG B,SHENG X.The Simulation of Statistical Characteristics of Dense Chaff Clouds[C]∥IEEE Global High Tech Congress on Electronics,Shenzheng:IEEE,2013:191-194.
[8]李金梁,曾勇虎,申绪涧,等.均匀取向箔条云的RCS极值研究[J].雷达科学与技术,2012,10(3):316-319.
[9]LI X,LIN L,SHAO X.A Target Polarization Recognition Method for Radar Echoes[C]∥International Conference on Microwave and Millimeter Wave Technology,Chengdu:IEEE,2010:1644-1647.
[10]YANG Yong,FENG De-jun,ZHANG Wen-ming,et al.Detection of Chaff Centroid Jamming Aided by GPS/INS[J].IET Radar,Sonar and Navigation,2013,7(2):130-142.
[11]ZHAN G,LU J,HU S,et al.Research on K-L Transform Based on Wavelet Transform for Anti-Chaff-Jamming[C]∥International Conference on Transportation,Mechanical and Electrical Engineering,Changchun:IEEE,2011:1500-1503.
[12]LAI Q,DAI H,ZHAO J,et al.A Novel Approach of Countering Centroid Jamming by Using INS Information in Terminal Guidance[C]∥IEEE 10th International Conference on Signal Processing,Beijing:IEEE,2010:2121-2124.
[13]杨勇,肖顺平,冯德军,等.雷达导引头斜投影抗质心干扰性能分析[J].电子学报,2014,42(3):439-444.
[14]沈允春,谢俊好,刘庆普.识别箔条云新方案[J].系统工程与电子技术,1995,17(4):60-63.
[15]刘庆普,沈允春.箔条云极化识别方案性能分析[J].系统工程与电子技术,1996,18(11):1-7.
[16]SHAO X,DU H,XUE J.Theoretical Analysis of Polarization Recognition Between Chaff Cloud and Ship[C]∥IEEE International Workshop on Anti-Counterfeiting,Security and Identification,Xiamen:IEEE,2007:125-129.
[17]SHAO X,DU H,XUE J.A New Method of Ship and Chaff Polarization Recognition Under Rain and Snow Cluster[C]∥IEEE International Workshop on Anti-Counterfeiting,Security and Identification(ASID),Xiamen:IEEE,2007:142-147.
[18]TANG B,LI H M,SHENG X Q.Jamming Recognition Method Based on the Full Polarisation Scattering Matrix of Chaff Clouds[J].IET Microwaves Antennas and Propagation,2012,6(13):1451-1460.