基于实时信息采集的船舶运动分析系统设计研究
2015-01-18陈悦
陈悦
(常州开放大学,江苏 常州 213001)
基于实时信息采集的船舶运动分析系统设计研究
陈悦
(常州开放大学,江苏 常州 213001)
针对现代河道船舶运输日益紧张的问题,本文设计出船舶运动分析系统来缓解河道运输压力。首先描述了国内外运动分析系统的发展现状;其次对我国河道交通现状进行了详细的分析;最后通过对船舶自动识别系统进行描述和分析系统更新频率,设计船舶运动位置的预测方法。本文对于河道管理人员和系统分析人员都具有积极的作用。
实时信息采集;船舶运动分析系统;位置预测;河道监控
1 引言
随着现代社会的发展,内河航运的安全性信息传送成为了现代社会发展的一项重要基础。利用信号台加强对船舶的动态监控,可以有效提高船舶运行中的安全系数。在现代的内河航运中,由于船只的增加,信号人员的工作量不断增大,而粗放型的工作方式也不能够满足日常业务工作的需求,所以在进行信息的采集以及信号的发送方面,就需要建设一套有效的处理方式,以此作为现代传播航行的重要指挥系统。
2 国内外的运动分析系统现状
伴随着现代信息遥感、GPS定位以及GIS等技术的快速发展,在智能化的交通领域中,逐渐兴起一种运动分析系统,用以辅助指挥某一运动体系。在相关的文献调研中,GIS系统结合现有的网络技术和数据库技术,设计出了较为便利的档案管理公安系统,在进行应用前景的分析中,其基于交通管理的指挥系统,也能够更好的适应于现代的交通管理。但是在河道运输中,是否能够满足此类交通的管理运输呢?其智能化平台,是否能够满足现有的交通运输标准?则成为本次的研究重心。
现代计算机水平的发展中,计算机技术、电子技术、通信技术等的平衡发展,在一定程度上促进了通讯系统的智能化,而智能化的学科领域中,实现交通管理的有效实施,也在一定程度上促进了现代智能化发展。有相关专家指出,利用模糊控制理论设计出的智能红绿灯系统,可以有效的解决河道内船舶运输混乱问题。
3 我国的河道交通现状
就目前我国的河道指挥控制方法来看,通过高频电话和远望镜来感知相邻的河段控制状态,并结合天气信息进行有效指挥,可有效的避免事故的发生,但是在现代河道发展中,对内河船只数量和实时监控要求的不断提高,在一定程度上也加重了管理的难度,人工管理已经不能满足当前河道船舶管理的要求。随着近年来水路智能交通系统的发展,在这一领域的指挥上出现了一种智能化的管理体系。
目前的河段指挥方法以及信号传播的现状无法真正达到实时报航和有序导航的目的,在尽量避免出现船舶等待等问题的应对上,使用有效的指挥策略,虽然可以有效管理,但是其精确度以及工作量等都不符合现代社会的管理发展策略。在对运河的运输通讯进行指挥的过程中,通过长距离的运动分析系统进行有效的强度分析,可促进现代的船舶指挥的信息化建设。由于劳动力过大,为避免下行船舶的等待问题,应当采取智能交通系统来促进现代的资源结构调整。
4 船舶运动分析系统
4.1 船舶自动识别系统AIS
船舶自动识别系统是近年来河道上船舶监管的有效工具,可以实时汇总当前河道上船舶的总量、评估可能发生的事故,有效保证了船舶航行的安全性,在上世纪我国就提出了在河道上利用船舶自动识别系统加强河道的管理。为了使我国的航道运输更加规范化和科学化,电信联盟和海事组织根据我国河道的现状制定AIS的标准。其作用就在于使用运动参数进行航行状态分析,并以此作为主要的修正参数,实现对海区的船舶停靠进行识别和监视,为船舶的停泊靠岸,提供信息的有效传播。
AIS为水路交通运输带来了革命性的转变,随着近年来船舶运输行业的发展,国际海事组织对此类运输的调控也基本上满足了现有的机械设备停运标准,在远洋船舶以及大部分的内河船舶上安装AIS,并根据实地统计实现现代系统的安装使用。其系统的传输结构如图1所示。
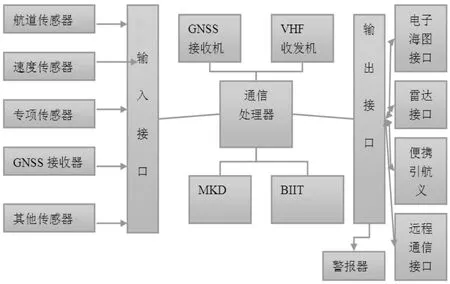
图1 AIS基本结构构图
4.2 AIS的更新频率
在设备的自主模式选择中,针对AIS的电文报告进行时间的间隔内选择,其报告的频率波段如表1所示。
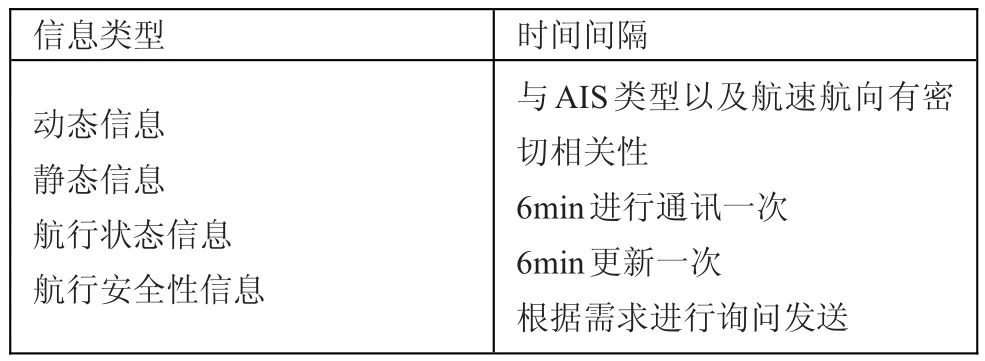
表1 AIS信息更新速率表
当具体的报告时间相隔比较大的时候,其具体情况如表2所示。

表2 AIS的时间报告间隔
4.3 经纬度坐标转换设计
在河道内进行信号的转换其中主要针对设备所获得的目标船舶信息,其中包括了MMSI号、航速、船名、船舶经纬度等信息,为了保障指挥中心对船舶的实时监控管理,通过运动位置的预测排定,需要通过船舶经纬信息转换来实现以地球经纬坐标的应用。我们选取控制河段信号所在的位置进行坐标点控制,其中针对经纬正方向的调控、船舶的运动方向进行高度变化、地球半径进行分析,忽略河道的垂直方向变化,并依此作为平面直角坐标系的中心进行位置确定。
在进行坐标的设计定位中,我们以O为经纬坐标中心,原始坐标为(α0,β0),目标经纬坐标则为(α,β),使用高斯投影进行平面直角确定,其坐标值设为(x,y),那么计算的办法如下:
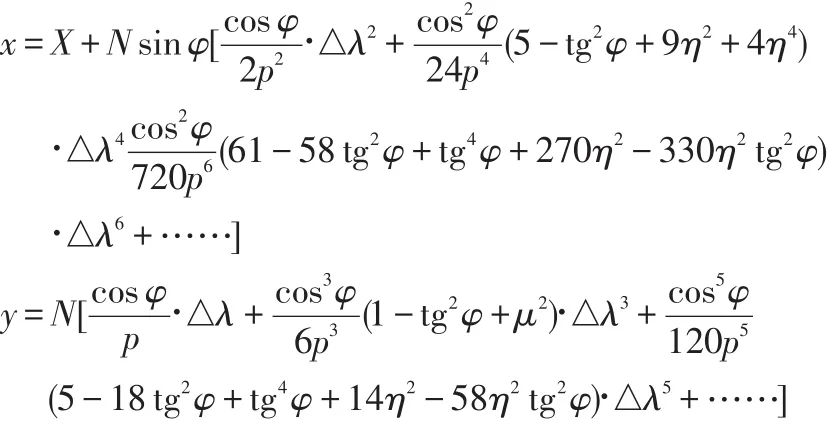
因此,船舶的运动位置可在预测范围内进行精确的预测,但是由于计算的项目可导致运算量的增大,可以在坐标计算中省去不必要的参数,以满足实际的预测需求为目的进行预算评估,可以大大减少计算工作量,提高工作效率。
4.4 船舶运动位置的预测方法设计
控制河道内的航道弯曲度,按原有的回环路线进行信息分析,并以船舶的运动模型进行线性设计,在信息原有的算法以及船舶运动位置进行航线的预测。费用预算方面,大量的费用集中在系统维护的开支上,这样对预测评估,都会产生不良的影响。所以根据船舶的区域以及AIS类型进行上下水位的汛期情况进行周期性预测,能够更好的保障船舶运行的安全性。
运动位置的预测方法,主要依据KF算法,这一算法是卡尔曼在1960年提出的,此方法在半个多世纪的使用中,不断被优化,其实际的操作办法,也得到了改进提升,通过对操作使用信号进行调整,明确输入和输出的关系,也可通过方程的形式得以描述。因此在这个过程中,为建立一个有效的结构形式,就需要通过不同的变量来进行全面的因素分析,估算出其中的各定制,并以此来建立有效的范围。在进行KF的计算中,其主要的运行方程如下所示。

在对其进行求解后,可得出实际情况下的预测信息模型,并针对矩阵变换进行通过噪声的协差值进行定值,最终得出误差结果。
5 总结
随着我国国民经济的发展,船舶运输的物流发展也呈现着十分明显的稳定增长趋势,在这样的一个结构成长中,船舶的数量得到了大幅度的增长,传统的管理已经难以实施全面的管理。因此需要进行全面的调整,以求能够有效的促进现有的经济发展,并依此作为发展的契机,大力发展现代内河船舶的信息系统建设。发展船舶运动分析系统,能够在更短的周期内进行航线的确定,增加运输的次数,提高运输的质量,对我国经济发展提供了更为广阔的空间。
参考文献:
[1]江林,李积德.应用二轴流速仪定向原理估计船舶遭遇的浪向[J].中国造船,2005,46(2):56-61.
[2]叶蕾.基于多传感器技术过闸船舶状态检测系统研究[D].武汉理工大学,2012.
[3]牛井超.船舶运动控制试验平台系统设计与海上试验[D].大连海事大学,2002.
[4]赵帅兵.基于改进卡尔曼滤波的船舶运动位置预测研究[D].重庆大学,2013.
[5]毕慧博.神背嘴信号台智能辅助指挥系统设计与实现[D].重庆大学,2012.
[6]许建峰.疏浚驳船载运状态智能监测模型研究[D].集美大学,2010.
[7]王学宝.基于ARM9的VDR保护存储体关键技术研究[D].哈尔滨工程大学,2006.
[8]钟德荣,冯亚新,蒋园园,刘明明.车辆信息采集设备的设计与实现[J].电脑与电信,2012,10:42-44.
Design and Research of Ship Motion Analysis System Based on Real Time Information Acquisition
Chen Yue
(Changzhou Open University,Changzhou 213001,Jiangsu)
Aiming at the problem of the increasing tension of modern river transportation,this paper designs a ship motion analysis system to relieve the pressure of river transport.Firstly,it describes the domestic and international sport analysis system.Secondly,it analyses the current situation of traffic channel in China.Finally,through the ship automatic identification system description and analysis of the system update frequency,location of the design for ship motion prediction method.This paper has a positive effect on the channel management and system analysis.
real time information collection;ship motion analysis system;position prediction;river monitoring
U665.26
A
:1008-6609(2015)12-0086-03
陈悦,女,江苏常州人,本科,讲师,研究方向:计算机应用。