AUV辅助的水下传感器网络时钟同步算法*
2015-01-18陈嘉兴
常 帅, 李 晶, 高 寒, 陈嘉兴
(河北师范大学 数学与信息科学学院,河北 石家庄 050024)
AUV辅助的水下传感器网络时钟同步算法*
常 帅, 李 晶, 高 寒, 陈嘉兴
(河北师范大学 数学与信息科学学院,河北 石家庄 050024)
针对当前水下传感器网络中的时钟同步难题,设计了一种三元阵被动定位自主水下航行器(AUV)模型,并基于此模型提出了AUV辅助的时钟同步(AUV-Sync)算法。该算法通过AUV与节点之间相对运动过程中进行的信息交换来对节点相对距离进行估计,进而基于相对距离计算单向传播时延来降低由于节点移动性所导致的误差。最后,通过两轮加权最小二乘法进行线性回归来估计时钟同步的参数。仿真结果表明:在存在节点漂移的动态水下传感器网络环境中,该算法较其他相关算法有更高的精度。
水下传感器网络; 自主水下航行器; 时钟同步; 传播时延
0 引 言
随着无线传感器网络的迅速发展和海洋经济热潮的兴起,水下传感器网络在海洋能源勘探、气象数据采集和海水环境监测等方面倍受重视[1]。与此同时,水下传感器网络在数据收集、节点定位以及通信协议等应用方面通常依赖于网络中节点的时钟同步[2]。然而,水下声信号传播长时延、节点漂移等因素给时钟同步带来了很大挑战。其中,声信号传播长时延是影响水下传感器节点时钟同步最主要的因素[3]。
目前,基于传播时延来进行时钟同步的算法可以分为两大类。其中一类算法,如TSHL算法[4]、MU-Sync算法[5]等, 假设节点静止,不考虑洋流等因素对节点造成的影响,这类算法过于理想,在实际应用中误差很大。另一类算法虽然考虑到了节点的移动性,如D-Sync算法[6]、DA-Sync算法[7]和Mobil-Sync算法[8]等, 但需要在节点周围部署大量的锚节点,这种网络不仅成本过高,而且在真实环境中难以部署。
本文针对上述难题设计了一种三元阵被动定位自主水下航行器(autonomous underwater vehicle,AUV)模型,三元被动定位方法是声纳、接收器等装置根据水下目标发送的声信号对其位置进行测定的一种方法[9]。基于该AUV模型提出了水下传感器网络时钟同步算法。该算法既考虑了节点的移动性同时采用单AUV替代大量参考点来解决网络成本过高和部署复杂等难题。
1 AUV辅助的水下传感器网络时钟同步算法
本文假设待同步的传感器节点被随机播撒在水中,网络节点的位置都随着洋流不断变化
S={sk},k=1,2,…,n,
(1)
式中sk为待定位的节点,S为所有待定位节点的集合。
图1显示了AUV和节点sk之间在信息交换过程中的相对运动。

图1 相对运动Fig 1 Relative movement
1.1 三元阵被动定位AUV模型
在相对运动中,AUV作为移动的锚节点沿着设定的路径在网络中穿行并周期性地发送时钟同步请求消息。因为洋流等因素的影响,节点sk在接收到请求消息后进行应答时其位置已经发生了改变,而当应答消息返回到AUV时,AUV的位置也发生了变化。可以将这种相对运动分成两个阶段:在第一阶段,AUV发送请求消息到达节点sk时,节点的位置事先未知,并且发生了改变,造成计算出来的相对距离存在较大误差,基于相对距离计算出来传播时延也将存在较大误差。而在第二阶段,节点sk发送应答消息到AUV时,节点的相对位置可以通过三元阵被动定位方法计算出来,因此,这一阶段的传播时延误差很小。本文采用第二阶段的传播时延进行线性回归,为时钟同步提供了一种新的研究思路。
三元阵被动定位AUV模型通过在AUV下方等间距安装三个接收器,同时在中间位置安装发射器来实现对节点相对位置的测量。其结构模型如图2所示。
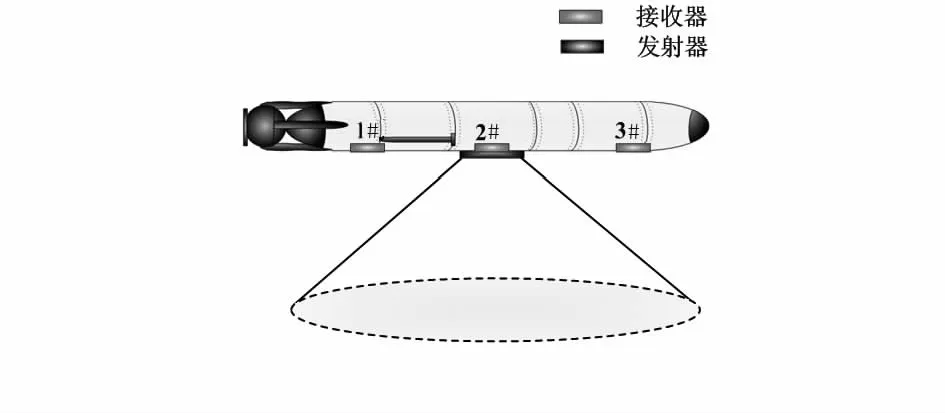
图2 三元阵被动定位AUV模型Fig 2 Model for AUV based on three-element array passive positioning
AUV通过发射器发送时钟同步请求消息,节点接收到请求消息后进行应答,而编号为分别为1#,2#,3#的接收器则用来接收应答信息, AUV通过应答消息测量节点和AUV之间的相对距离。
1.2 时钟同步基本思想
在大规模分布式网络中,节点只能通过自身配备的晶振计数计算本地时间。而时钟漂移表示实际频率与标准频率的比值。由于晶振计数周期存在波动,因此,实际频率的值既取决于节点的具体晶振,也是时间的函数。时钟偏移表示节点开始计时起点的差异。节点的本地时间与标准时间的之间的关系为
T=αt+β.
(2)
其中,T为节点的传感器节点时间,t为AUV的标准时间,α和β分别为时钟漂移和时钟偏移。
1.3 数据收集
在感知区域内,AUV每隔时间ts发送一次时钟同步请求消息,当节点sk在时刻T2接收到请求消息后,立即开始广播包含其ID号和时间戳T3的应答消息,其中,时间戳T3为应答消息发送前从MAC层获得的瞬时时间。当应答消息到达AUV时,编号为1#,2#,3#的三个接收器分别记录下到达自己的时间戳t4,t5和t6,同时也记录下节点sk的ID号和时间戳T3。图3显示了AUV和节点之间信息交换所产生的时间戳。

图3 信息交换过程Fig 3 Process of message exchange
1.4 传播距离
由于AVU与节点之间距离较短,声速可以被设为常量η。一旦AUV的时间戳产生,节点和接收器之间的相对距离将被计算出来。由于接收器之间的距离是等间距的,因此,可以通过图4建立传播距离模型。
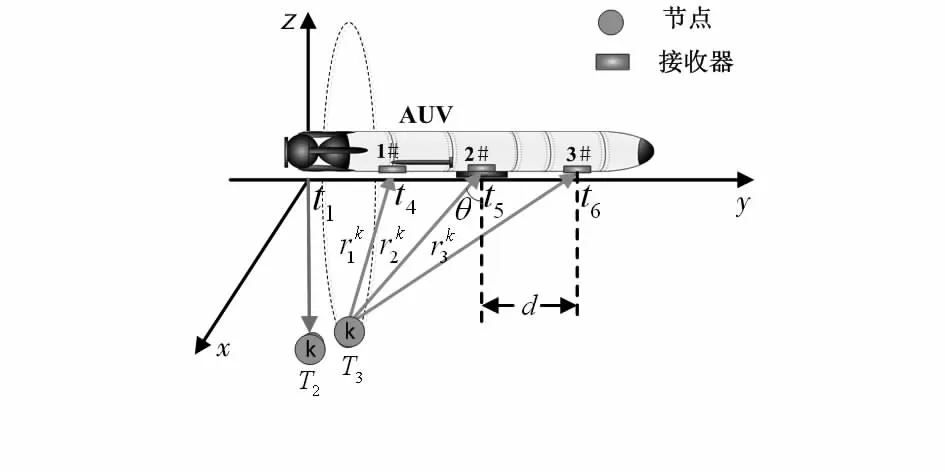
图4 传播距离模型Fig 4 Model for propagation distances

(3)
由于声速是一个常数,而三个接收器之间的距离可以设为d,通过信息交换过程中产生的时间戳和式(2)可以表示出相应的传播时延
(4)
(5)
(6)
(7)
(8)
联立方程式(3)、式(4)、式(5)、式(6)、式(7)和式(8),可得节点到2#接收器的距离
(9)
θ=
(10)
1.5 传播时延估计
本文利用相对运动和由传感器节点sk返回的三条应答消息来估算相对距离,进而计算第二阶段单向传播时延,避免取平均可能带来的误差,因此,得到了更准确的估计值。
考虑到每一轮的信息交换过程,应答消息返回的传播时延可以计算如下
(11)
1.6 线性回归
(12)

(13)
(14)

2 仿真验证与分析
在仿真实验中,AUV的时间被设定为世界时间,节点的本地时间由于受不同因素的影响不断偏离世界时。节点的时钟漂移设为40×10-6,时钟偏移设为0.000 8 s,声速设为1 500 m/s。
通过线性回归得到如图5所示的直线,通过直线的斜率和截距可以得到时钟同步的时钟漂移38×10-6,时钟偏移量约为0.000 7 s,与设定的值基本吻合,误差很小。

图5 线性回归Fig 5 Linear regression
为了进一步模拟真实的环境,本文将洋流等因素引起的声速偏差考虑进来。由图6可知,随着声速偏差的增加,误差也逐渐增大,这是由于声速偏差导致相对距离的测量产生误差并引起传播时延和时钟同步误差。
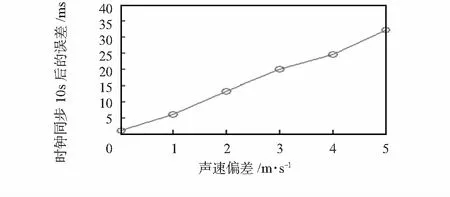
图6 声速偏差对时钟同步的影响Fig 6 Effect of speed of sound deviation on time synchronization
在对比实验中,考虑到当深度差为1 000 m时声速偏差约为0.05 m/s,而传感器的通信范围通常小于1 000 m,为了得到真实的对比结果,本文将声速偏移的误差阈值设为0.05 m/s。当声速误差达到最大阈值时,本算法与其他算法进行的对比如图7所示。
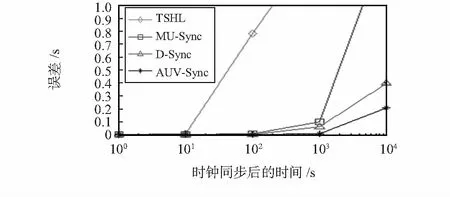
图7 时钟同步后的误差Fig 7 Error after time synchronization
通过与TSHL算法、Mu-Sync算法和D-Sync算法对比可以看出:随着时间的增加,虽然所有算法的误差都在增大,但是本文的 AUV-Sync算法能够更加准备地计算出来传播时延,所以,相对其他算法误差较小。
3 结束语
本文针对目前水下传感器网络时钟同步所面临的难题,设计了一种三元阵被动定位AUV模型,基于该模型提出了AUV辅助的时钟同步算法,减小了由于节点的移动性所带来的误差。同时,通过单AUV代替大量的锚节点进行时钟同步,解决了网络成本过高和部署复杂性等难题。
[1] Song Y,Kainam W.Three-dimensional localization of a near-field emitter of unknown spectrum,using an acoustic vector sensor corrupted by ad-ditive noise of unknown spectrum[J].IEEE Transactions on Aerospace and Electronic Systems,2013,49(2):1035-1041.
[2] Guo X X,Frater M R,Ryan M J.Design of a propagation-delay-tolerant MAC protocol for underwater acoustic sensor network-s[J].IEEE Journal of Oceanic Engineering,2009,34(2):170-180.
[3] Liu J,Han X,Al-Bzoor M,et al.PADP:Prediction assisted dynamic surface gateway placement for mobile underwater networks[C]∥Pro-
ceedings of the 2012 IEEE Symposium on Computers and Communications,Cappadocia,Piscataway,NJ,USA:IEEE,2012:139-144.
[4] Syed A,Heidemann J.Time synchronization for high latency acoustic networks[C]∥Proceedings of 2006 the 25th IEEE International Conference on Computer Communications,Barcelona,Spain,Piscataway,NJ,USA:IEEE,2006:1-12.
[5] Chirdchoo N,Soh W,Chua K C.MU-Sync:A time synchronization protocol for underwater mobile networks[C]∥Proceedings of 2008 the Third ACM International Workshop on Underwater Networks,New York,USA:ACM,2008:35-42.
[6] Feng L,Diba M,Curt S.D-sync:Doppler-based time synchronization for mobile underwater sensor networks[C]∥Proceedings of 2010 the Fifth ACM International Workshop on Underwater Networks,New York,USA:ACM,2010:1-8.
[7] Jun L,Zhaohui W,Zuba M,et al.DA-Sync:A Doppler-assisted time-synchronization scheme for mobile underwater sensor networks[J].IEEE Transactions on Mobile Computing,2014,13(3):582-595.
[8] Jun L,Zhong Z,Zheng P,et al.Mobi-Sync:Efficient time synchronization for mobile underwater sensor networks[J].IEEE Transactions on Parallel and Distributed Systems,2013,24(2):406-416.
[9] Arkhipov M.An approach to using basic three-element arrays in tetrahedral-based USBL systems[C]∥2013 OCEANS,San Diego,CA,USA:IEEE,2013:1-8.
陈嘉兴,通讯作者,E—mail:13930194955@163.com。
AUV-assisted time synchronization algorithm for underwater sensor networks*
CHANG Shuai, LI Jing, GAO Han, CHEN Jia-xing
(College of Mathematics and Information Science,Hebei Normal University,Shijiazhuang 050024,China)
Aiming at problem of time synchronization in underwater sensor networks,a model for autonomous underwater vehicle(AUV) based on three-element array passive positioning method is designed.Based on this model,propose an AUV-assisted time synchronization algorithm(AUV-Sync),which estimates relative distance by message exchange in process of relative movement between AUV and sensor nodes,and reduce error caused by nodes mobility by computing one-way propagation delay based on relative distance.By two rounds weighted least squares estimation(WLSE) to perform linear regression to estimate time synchronization parameters.Simulation results show that the AUV-Sync outperforms the existing synchronization algorithms for dynamic underwater sensor networks in precision considering drift of nodes.
underwater sensor networks; autonomous underwater vehicle (AUV); time synchronization; propagation delay
10.13873/J.1000—9787(2015)10—0137—04
2015—07—27
国家自然科学基金资助项目(61271125)
TP 393
: A
: 1000—9787(2015)10—0137—04
常 帅(1986-),男,河北石家庄人,硕士研究生,主要研究方向为无线传感器网络等。
