快速极坐标霍夫变换检测前跟踪算法
2015-01-16杭州电子科技大学通信信息传输与融合技术国防重点实验室陈国全郭云飞郑晓峰
杭州电子科技大学通信信息传输与融合技术国防重点实验室 陈国全 郭云飞 郑晓峰
快速极坐标霍夫变换检测前跟踪算法
杭州电子科技大学通信信息传输与融合技术国防重点实验室 陈国全 郭云飞 郑晓峰
针对弱目标检测前跟踪问题,本文提出一种快速极坐标霍夫变换算法。该方法利用目标运动速度先验信息和雷达回波帧序号信息,对相邻两帧内满足目标特性的雷达数据进行组合,再利用极坐标霍夫变换进行目标检测。通过与传统霍夫变换方法的仿真比较,验证了本文所提方法的性能优势。
弱目标;检测前跟踪;极坐标霍夫变换;快速算法
0 引言
检测前跟踪(Track-Before-Detect,TBD)技术是一种低信噪比下联合检测和跟踪的有效技术。该技术对雷达回波数据设定较低门限甚至不设门限,通过多帧积累提高目标检测性能。基于霍夫变换的TBD技术由于良好的检测性能,受到该领域广大学者和工程人员的欢迎。霍夫变换首先被应用于图像处理应用中[3],是检测直线运动目标的一种有效方法。B.D.Carlson等人将Hough变换应用于搜索雷达的目标检测中[1]。Moyer等人针对强杂波背景下,提出一种基于多维Hough变换的弱目标TBD算法[4]。该方法对雷达数据分别做两维Hough变换,在强杂波环境下直线运动的多目标检测具有较好的鲁棒性。魏兰玲等提出一种利用帧序号限制最小点集选取的改进随机Hough变换方法[5]。上述方法在处理雷达极坐标数据时需要首先将搜索雷达中的数据进行极坐标-笛卡尔坐标变换,才能进行目标检测。由于坐标变换中的转换误差,降低了目标的检测跟踪性能。为此,I.Garvanov,C. Kabakchiev等人提出了一种极坐标Hough变换(Polar Hough Transform,PHT)方法[2],可有效降低直角坐标系Hough变换引入的转换误差。然而,极坐标Hough变换也是基于一对多映射,计算量大,实时性能较差。
本文针对雷达弱目标检测跟踪问题,提出一种基于目标运动特性的快速极坐标Hough变换方法(Fast Polar Hough Transform,FPHT)。该方法利用目标运动速度先验信息和雷达回波帧序号信息,对相邻两帧内满足目标特性的雷达数据进行组合,再利用极坐标霍夫变换进行目标检测。本文结构如下,第一部分介绍了FPHT的算法流程,第二部分仿真验证了FPHT和PHT在检测性能和时间上的优缺点。第三部分对本文做一下总结。
1 FPHT算法流程
快速极坐标Hough变换TBD方法,其基本思想是在极坐标系下,利用目标在相邻两帧数据中的运动相关性,建立跟踪门,剔除大量的无效点集组合,从而提高霍夫变换的实时性能。我们将相邻两帧雷达数据进行组合,在组合中选取满足速度约束的点集进行存储,通过组合点集采用随机Hough变换[6,7]计算参数的方法计算,在参数空间对应量化单元格进行投票选择,这种方法不需要跟标准极坐标Hough一样对所有角度进行遍历求解,通过运动目标的速度约束大大减少了无效点集的选取,这样可以减少了算法的运行时间,有利于Hough参数平面中正确目标参数峰值积累。
FPHT详细的算法步骤如下所示:
假设第K帧雷达回波数据量测集合为:

步骤1、首先对雷达提供的每一帧回波数据做第一门限处理,将所有超过第一门限的雷达回波按照目标所在的帧序号存储在对应矩阵表示第k帧超过第一门限的雷达目标数据集合,表示第k帧回波量测数据中第j个超过门限数据的径向距离和方位角,表示第k帧回波数据在位置的信号幅值信息,代表第一门限值。lk这表示第k帧共计超过第一门限数据个数。
步骤2、接着根据帧序号,枚举组合相邻两帧雷达数据中的点集,若组合点集满足公式(1)则其存储在矩阵PHT中,即当选取点集满足下式:



2 仿真分析
为了验证FPHT算法有效性,分别采用了PHT和FPHT算法对雷达数据进行验证分析。模拟仿真了雷达数据的目标信息如下:雷达扫描周期T=30s,目标速度范围为50~200m/s,雷达共计接受回波帧数K=60。
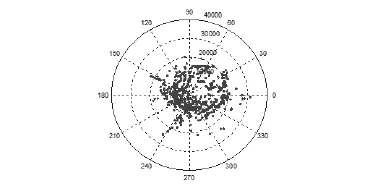
图1 所有帧雷达回波数据
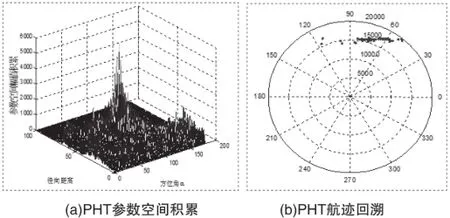
图2 PHT检测跟踪结果

图3 FPHT检测跟踪结果
通过对雷达数据进行仿真验证可以发现,F-PHT算法在图3(a)参数空间积累形成了多个明显峰值,在航迹回溯中,图3(b)成功检测出了三条目标轨迹,而PHT算法由于没有运用目标的运动特性进行预处理只是对每个点做Hough变化,则在图2(a)导致杂波在参数空间形成的峰值比目标形成的峰值高,所以出现了漏检的情况,则在图2(b)中检测出一个目标。本文通过500次蒙特卡罗仿真,得到PHT平均运行算法为0.5231,FPHT平均运行算法为0.4983。所以本文所提出的方法还是较PHT算法在运行时间上有所改善。通过多次仿真分析得到性能对比图如表1所示。

表1 两种算法性能对比图
3 结论
针对雷达弱目标检测跟踪问题,本文提出一种基于快速极坐标霍夫变换的检测前跟踪算法。该算法利用相邻帧的目标运动相关性,建立跟踪门,所有落入跟踪门的测量数据组合进行极坐标霍夫变换,从而检测出目标信息。与传统极坐标霍夫变换相比,测量数据组合数大幅下降,实时性得到有效改善。
[1]Carlson B D,Evans E D,Wilson S L.Search radar detection and track with the Hough transform. detection statistics[J].Aerospace & Electronic Systems IEEE Transactions on,1994,30(1):105-115.
[2]Chr Kabakchiev,I Garvanov.Radar Detect and Track Determination with a Transform Analogous to the Hough Transform[J].IRS,2006:121-124.
[3]王国宏,孔敏,何友.Hough变换及其在信息处理中的应用[M].兵器工业出版社,2005.
[4]Moyer L.R.,Spak J.,Lamanna P.A Multi-Dimensional Hough Transform Based Track-Before-Detect Technique for Detecting Weak Targets in Strong Clutter Backgrounds[J].IEEE transactions on aerospace and electronic systems,2011,47(4):3062-3068.
[5]魏兰玲.基于随机霍夫变换的微弱目标检测方法研究[D].成都:电子科技大学,2011.
[6]Xu L,Oja E,Kulttenen P.A new curve detection method: randomized Hough Transform[J].Pattern Recognition Letters,1990,11(5): 331-338.
[7]Gao C,Deng X,Shi C.Detection of Dim Maneuvering Target Ased on Randomized Hough Transform[J].Procedia Engineering,2012(29): 808-813.
陈国全,男,杭州电子科技大学硕士在读, 研究方向:雷达数据处理。
郭云飞(1978-),男,博士,杭州电子科技大学副教授,研究领域包括目标检测、跟踪与非线性滤波。
郑晓枫(1989-),男,杭州电子科技大学硕士在读,研究方向:雷达数据处理。