一种无刷双馈感应电机无功功率的控制方法
2015-01-13赵荣理张爱玲田慕琴
赵荣理,张爱玲,田慕琴,王 昕
(1.太原理工大学,太原030024;2.南车株洲电机有限公司,株洲412000)
0 引 言
无刷双馈电机(以下简称BDFM)是近年来广受瞩目的一种新型电机,其结构是定子上有两套相互独立的不同极数的三相对称绕组,即功率绕组和控制绕组,分别由电网和变频器供电。转子结构有两种,一种为磁阻转子(以下简称BDFRM),另一类为笼型转子(以下简称BDFIM),本文所研究的是笼型转子的无刷双馈电机,即无刷双馈感应电机。
BDFM 没有电刷,所需逆变器容量较小且功率因数可调,可用在变速恒频风力发电系统和大容量的变频调速系统中,BDFM 控制策略的研究是其能否得到广泛应用的关键,自从20 世纪90 年代BDFM 两轴动态数学模型[1-2]建立之后,其控制策略的研究就进入了快速发展时期,主要集中在矢量控制和直接转矩控制上。矢量控制方面,文献[3]提出了转子磁链场定向的BDFM 矢量控制方法,文献[4]实现了功率绕组磁链定向的矢量控制系统。在直接转矩控制方面,文献[5]提出了基于转矩预测控制的BDFM 的直接转矩控制方法,文献[6]提出了基于波波夫超稳定性的BDFM 直接转矩控制方法并进行了仿真。除此之外,文献[7-8]提出了一种BDFIM 的间接转矩控制方法,此控制策略不需要旋转变换,系统结构简单,实验结果证明了此控制策略的可行性。
由于无刷双馈电机功率因数可控,因此无功功率可以调节,无功功率的调节可以改善电网的功率因数,本文在文献[8]的基础上,在BDFIM 的间接转矩控制系统中,在功率绕组静止坐标系推导了功率绕组无功功率与控制绕组磁链之间的关系,设计了无功功率的控制器,提出了一种无功功率的控制方法,使得该控制系统不仅能够实现转速、转矩的控制,而且能够实现无功功率的控制,仿真结果验证了这种无功功率控制方法的可行性。
1 功率绕组无功功率和控制绕组磁链之间的关系
1.1 BDFIM 在功率绕组静止坐标系的数学模型
BDFIM 功率绕组无功功率与控制绕组磁链之间关系的推导,需要在同一个坐标系完成,本文选择了功率绕组静止坐标系,BDFIM 在功率绕组静止坐标系的电压和磁链方程如下[2]:
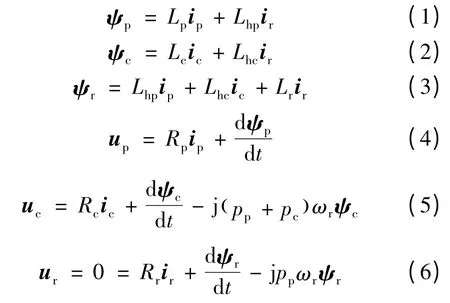
在功率绕组静止坐标系上功率绕组的无功功率:

式(1)-式(7)中,i,u 和ψ 为电流、电压和磁链矢量。上标* 表示矢量的共轭,下标p,c 和r 分别为功率绕组、控制绕组和转子绕组的变量,例如,up是功率绕组电压矢量,下面的表示方法类同;Rp,Rc和Rr为电阻;Lhp,Lhc分别为功率绕组、控制绕组和转子耦合的电感;Lp,Lc和Lr是自感;p 表示极对数;ωr表示转子角速度;Im 表示复数的虚部。
1.2 功率绕组无功功率和控制绕组磁链的关系
由式(1)可得:

将式(8)代入式(2),ic可以表示:

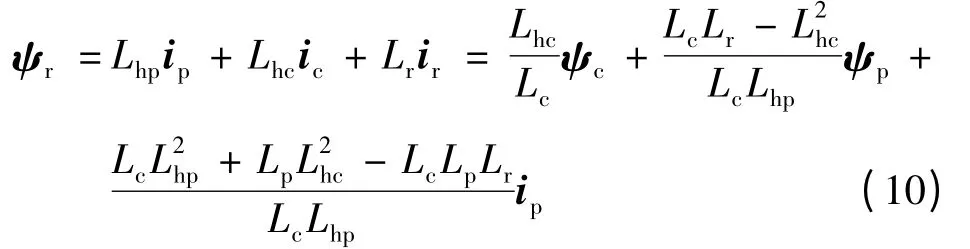
将式(8)和式(9)代入到式(3),ψr可写成:
考虑到式(8)、式(10),式(6)可以写成:


则式(11)可化简:

即:

因为功率绕组和电网相连,所以功率绕组的磁链ψp可表示:

忽略电阻压降,可得:

将式(14)、式(16)代入到式(7),功率绕组的无功功率可以表示:
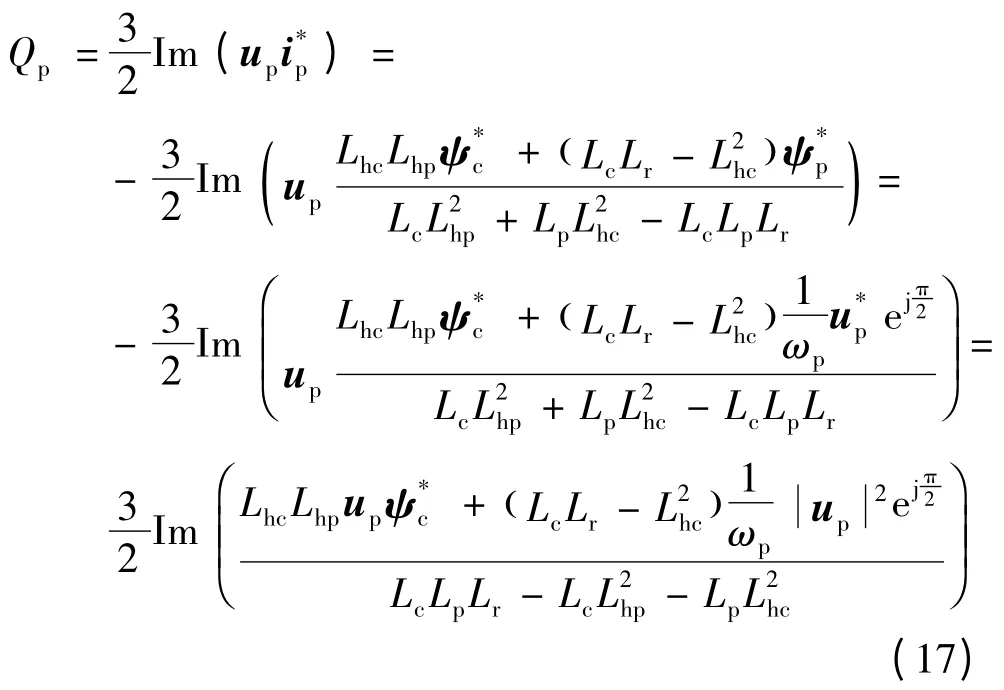
从式(17)可看出,功率绕组无功功率除了和电机的参数有关外,还与功率绕组电压和控制绕组磁链有关,由于功率绕组和电网相连,是不可控的,因此,无功功率只与控制绕组磁链ψc有关系,也就是说通过对ψc的控制可以实现无功功率的控制。
2 具有无功功率控制的BDFIM 间接转矩控制系统的结构框图
2.1 控制绕组磁链ψc 的增量
图1 是控制绕组磁链空间矢量ψc(t)的运动轨迹。在每一个Tpwm周期内,控制绕组磁链前进一步,由ψc(k-1)变为ψc(k),磁链的幅值和相位均发生变化,用ks(k)和ΔXc(k)分别表示控制绕组磁链在一个采样周期的幅值和相位增量。ΔXc(k)由静态角增量ΔXst(k)和动态角增量ΔXd(k)组成,即:
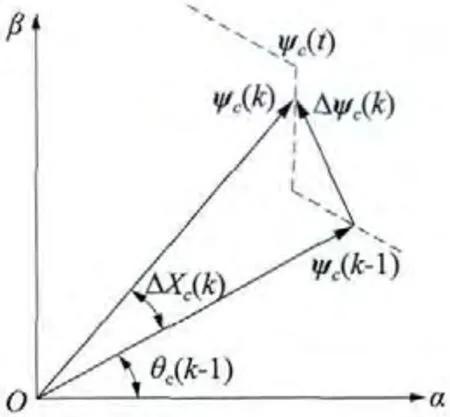
图1 控制绕组磁链的空间矢量轨迹

静态角的计算方法:

图1 中磁链增量可表示:

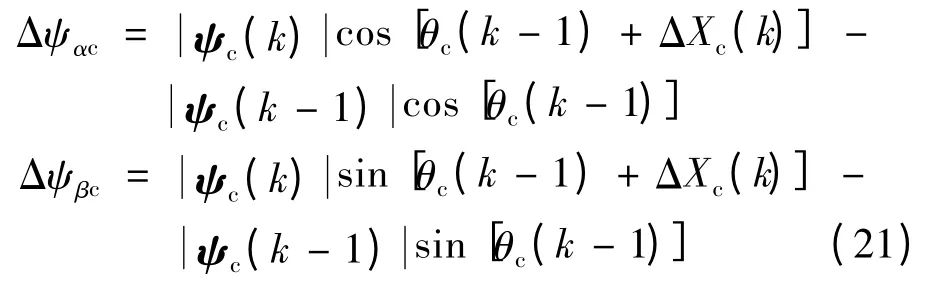
其在αβ 轴的分量:
2.2 具有无功功率控制的BDFIM 间接转矩控制系统的结构框图
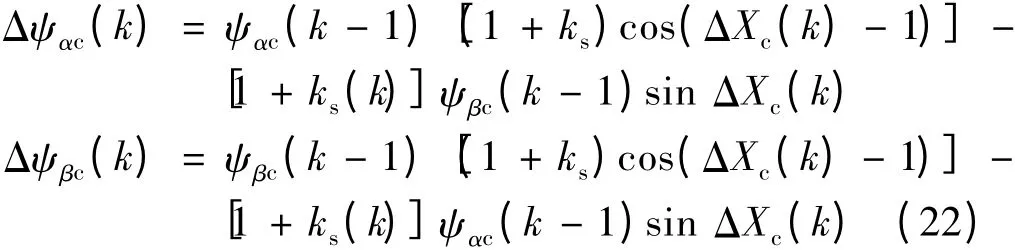
具有无功功率控制的BDFIM 间接转矩控制系统的结构框图如图2 所示,和文献[8]提出的结构图相比,由于本文所推导出的无功功率与控制绕组磁链之间的关系,所以在磁链环的外面增加了无功功率控制环,即磁链的给定值是无功功率PI 调节器的输出值,这样就可以对无功功率进行控制。图2中,转矩环为速度环的内环,转矩内环提供了限流功能并提高了系统的动态性能。磁链环为无功功率的内环,其中转速和无功功率PI 调节器的输入分别为速度和无功功率的偏差信号,其输出分别为转矩给定值和控制绕组磁链给定值,转矩和磁链PI 调节器的输入分别为转矩和磁链的偏差信号,其输出分别为控制绕组磁链动态角增量ΔXd和磁链幅值增量Ks,ΔXd与静态角增量ΔXst相加后得到磁链相角增量ΔXc,由式(22)可计算出控制绕组磁链增量Δψαc和Δψβc,用式(23)得到控制绕组空间电压分量uαc和uβc。控制绕组的uαc和uβc是PWM 发生器的输入,PWM 发生器产生所需要的PWM 波。
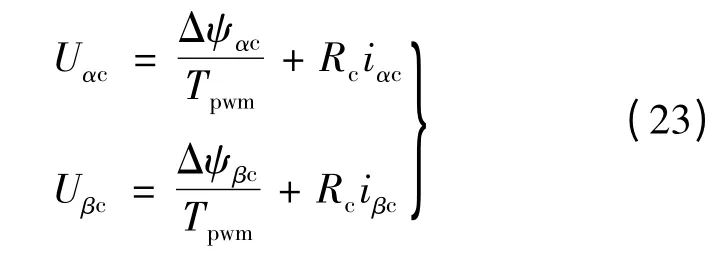
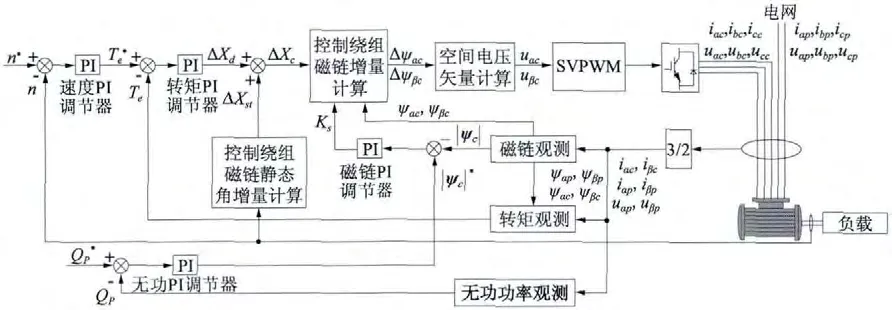
图2 具有无功功率控制的BDFIM 间接转矩控制系统结构框图
2.3 无功功率观测值、磁链观测值和电磁转矩观测值的计算
图2 中,无功功率观测值、磁链观测值和电磁转矩观测值的计算只需在静止坐标系上就可以完成,采用功率绕组和控制绕组的电压、电流及磁链的αβ分量来完成计算,不需要进行旋转坐标变换。
用功率绕组电压和电流分量表示的话,无功功率可表示:

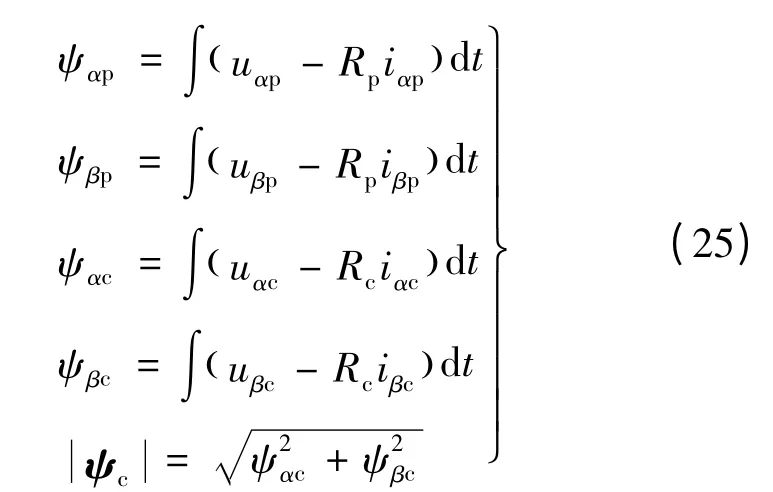
磁链观测值ψαp,ψβp,ψαc和ψβc计算如下[8]:
电磁转矩可表示为功率绕组和控制绕组电磁转矩观测值之和[8],即:

其中:
3 仿真及分析
根据图2 的结构框图对具有无功功率控制的BDFIM 间接功率控制系统进行MATLAB/Simulink建模与仿真。电机参数:功率绕组极对数pp=3,控制绕组极对数pc=1,PpN=3 kW,upN=380 V,IpN=5.8 A,Lhc=4 mH,Lr=0.048 mH,Rp=3.2 Ω,Rc=5.32 Ω,Rr=0. 173 mΩ,Lp=292 mH,Lhp=2. 16 mH,Lc=642 mH,J=0.064 kg·m2。
3.1 无功功率给定值阶跃变化的响应
图3 为转速为600 r/min(亚同步fc=10 Hz),转矩为5 N·m 时无功功率给定值阶跃变化的响应。

图3 无功功率给定值的阶跃响应
3.2 负载转矩阶跃变化的响应
图4 为转速为600 r/min(亚同步fc=10 Hz),无功功率给定值为500 var,负载转矩在3 s 时从5 N·m 阶跃变化为10 N·m 的响应。如图4(a)所示,BDFIM 的电磁转矩为了与负载转矩相平衡,也变化为10 N·m。由于负载的增加,导致转速在3 s 时下降,经过转速PI 调节器调节后,转速经过0.6 s 又恢复为600 r/min,如图4(b)所示。图4(c)为无功功率的波形,在负载变化瞬间,无功功率也受到影响,但之后在无功PI 调节器的调节下,又逐渐恢复稳定。控制绕组磁链幅值如图4(c)所示,与无功功率变化趋势相同。功率绕组A 相电流3 s 时随着转矩增加而增加,波形如图4(d)所示。图4 表明无功功率具有一定的抗扰性能。
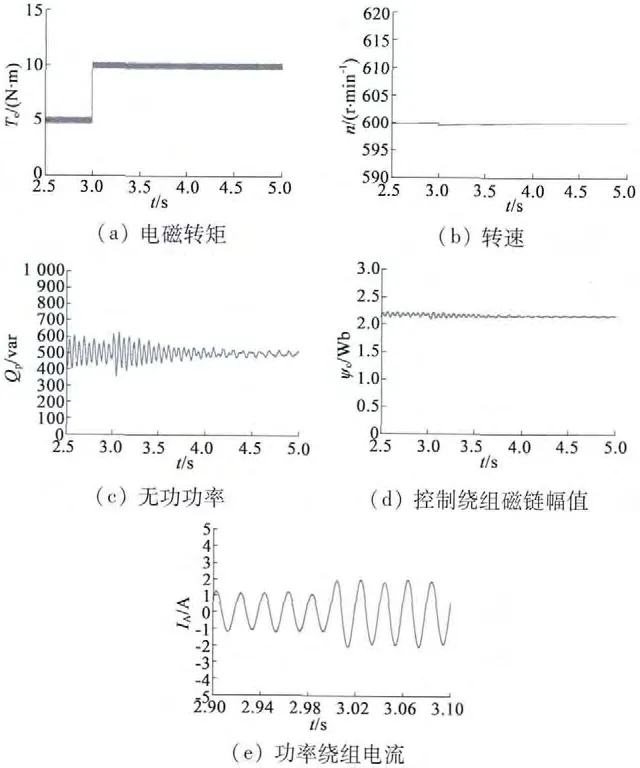
图4 负载转矩的阶跃响应
3.3 仿真结果分析
从图3和图4的仿真结果可看出,无功功率具有一定的跟随性能和抗扰性能,说明所设计的无功调节器能够控制无功功率。当无功给定值发生变化时,对转矩基本没有影响;而当负载转矩变化时,对无功功率的瞬时值有影响,但在无功PI 调节器的调节下,无功功率很快恢复稳定。这说明无功功率是可控的。
4 结 语
本文提出一种BDFIM 间接转矩控制系统中无功功率的控制方法,在系统所需观测值的计算过程中,只需进行3/2 坐标变换,无需进行旋转坐标变换,而且所用到的电机参数较少。无功功率的跟随性能和抗扰性能已经通过仿真进行了验证,仿真结果证明此方法可以实现无功功率的控制。
[1] BOGER M S,WALLACE A K. General pole number model of the brushless doubly-fed machine[J].IEEE Trans.on Ind. Appl.,1995,31:1022-1028.
[2] POZA J,OYARBIDE E,ROYE D,et al. Unified reference frame dq model of the brushless doubly fed machine[J].IEE Proceedings on Electric Power Applications,2006,153(5):726-734.
[3] 黄守道,王耀南,黄科元,等.无刷双馈电机转子磁场定向控制策略的研究.电工技术学报[J].2002,17(2):34-38.
[4] SHAO S,ABDI E,BARAT E,et al.Stator-flux-oriented vector control for brushless doubly fed induction generator[J]. IEEE Trans.on Ind. Electron,2009,56(10):4220-4228.
[5] 张爱玲,张洋.基于转矩预测控制的无刷双馈电机直接转矩控制系统[J].电机与控制学报,2007,11(4):326-330.
[6] 杨俊华,吕惠子,吴捷,,等. 基于波波夫超稳定性的无刷双馈电机直接转矩控制[J]. 中国电机工程学报,2009,29(15):107-113.
[7] ZHANG A,JIA W,ZHOU Z,et al. A study on indirect stator-quantities control strategy for brushless doubly-fed induction machine[C]//Proc. Int. Conf. Electr. Mach. Syst,2011:1-6.
[8] ZHANG A,WANG X,JIA W,et al.Indirect stator-quantities control for the brushless doubly fed induction machine [J]. IEEE Trans. on Power Electron,2014,29(3):1392-1401.
[9] LINDELL I V. Heaviside operational rules applicable to electromagnetic problems[J]. Progress in Electromagnetics Research,2000,26:293-331.