船用压载空气压缩机控制系统的设计
2015-01-13于祥春关敬民孔凡旭魏鹏飞
于祥春 关敬民 孔凡旭 高 帅 魏鹏飞
(海洋石油工程股份有限公司,天津 300451)
半潜式自航工程船(Semi-submersible Ships)也称半潜式母船,是专门运输大型海上石油钻井平台、大型舰船、潜艇、龙门吊及预制桥梁构件等超长超重,但又无法分割吊运的超大型设备的特种海运船舶。半潜式自航工程船在工作时,会像潜水艇一样,通过调整船身压载水量,平稳地将一个足球场大小的船身甲板潜入10~30m深的水下,只露出船楼建筑;然后等需要装运的货物拖拽到已经潜入水下的装货甲板上方时,启动大型空气压缩机,用压缩空气将半潜式自航工程船身压载水舱的压载水排出船体,使船身连同甲板上的承载货物一起浮出水面,然后绑扎固定,海运至目的地。
半潜式自航工程船的空气压载系统主要包括空气压缩机、空气管路、压载舱及透气管路等系统,其中空气压缩机系统的设计和供货基本由Atlas Copco、Aerzen和Ingersoll-rand公司垄断。而压载系统是半潜式自航工程船正常工作的重中之重,笔者将重点阐述半潜式自航工程船压载空气压缩机控制系统的硬件结构和控制流程的设计方案。
1 船用压载系统①
船舶的压载方式主要有压载水泵、压缩空气和利用静水压力(重力)自流3种方式。不同压载方式的压载速度不同,消耗的能量也不尽相同,船舶下潜和上浮的作业时间也有很大差异。
某项目船舶压载系统设置有两套单独的系统:空气压载系统(图1)和水泵压载系统(图2),并以空气压载系统为主、水泵压载系统为辅,两种方式配合使用。空气压缩机系统是空气压载系统的核心,为整个压载系统提供可靠的压缩空气,空气压缩机系统包括4套空气压缩机系统(每台流量6 750m3/h、压力270kPa),每两套系统并联工作,同时为两个压载主空气管汇提供压缩空气。水泵压载系统包括:艏部水泵系统,两台离心泵,流量1 500m3/h、压力350kPa,负责主甲板以上的压载水舱;艉部水泵系统,两台离心泵,流量400m3/h、压力350kPa,负责艉浮箱和尾部其中一个压载水舱。
2 压载空气压缩机控制系统
压载空气压缩机控制系统集中了报警、监测及控制等功能,而船底水系统、压载系统、冷却水系统、通风系统及压缩机系统等各子系统分散独立运行,同时又与全船控制系统相互联系,实现综合报警、监测及控制等功能。全船控制系统的功能类似于DCS系统;而压载空气压缩机控制系统则以PLC为核心的单元控制系统,类似于DCS系统的现场操作控制站。
压载空气压缩机系统主要包括无油螺杆空气压缩机、后冷却器、气水分离器和相关的电控仪表,这些也是压载空气压缩机控制系统的主要控制对象,其中无油螺杆空气压缩机自带控制柜,也是压载空气压缩机控制系统的控制对象。压载空气压缩机的工作过程主要是压载作业和排载作业,因此压载空气压缩机的系统控制也是围绕这两类作业设计的。
3 压载空气压缩机控制系统的硬件配置

图1 空气压载系统示意图

图2 水泵压载系统示意图
压载空气压缩机系统主要由4套相同的空气压缩机系统组成,且互为备用。同样控制系统也是4套互为备用,而且每一套本身又是CPU和通信冗余配备,空气压缩机控制系统的硬件配置如图3所示。双CPU之间采用同步光纤通信,与ET200之间采用Profibus DP通信,与触摸屏之间采用网线Internet通信,与DCS系统之间采用Modbus RTU 485通信。
系统采用Simatic S7-400,包括:CPU 412-3H,2块;模拟量输入模块,8点 1块;数字量输入模块,16点 1块,32点 1块;数字量输出模块,16点 1块。触摸屏为Simatic MP 277 Touch,是多功能平台类HMI设备,可扩展办公领域的通信功能,设有Profibus DP接口、以太网接口和TFT屏幕,并且支持Sm@rt Service、Sm@rt Acess和OPC服务器。
4台空气压缩机控制系统之间的通信采用Modbus RTU 485,采用冗余配置,其通信冗余连接如图4所示。
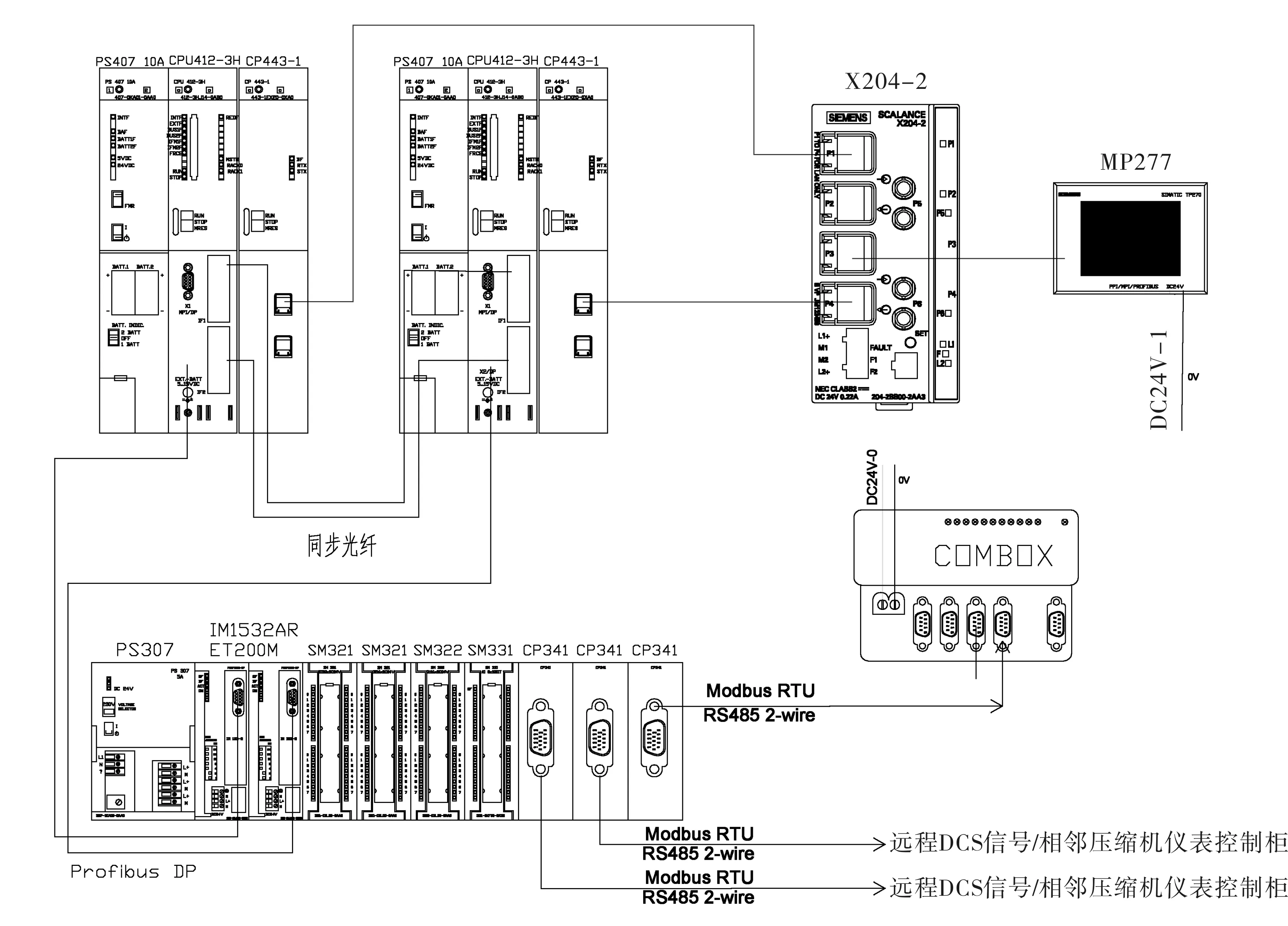
图3 空气压缩机控制系统硬件配置

图4 压载空气压缩机系统通信连接示意图
4 压载空气压缩机控制系统的软件流程
图1中给出了压载空气压缩机系统的各个设备,及其与全船系统的联系。在此流程的基础上,设计了如图5所示的压载空气压缩机系统的控制软件流程。
空气压缩机的初始状态为停机状态,电动阀3701~3704都处于关闭状态。排载启动的控制过程:首先打开电动阀3701和3704,同时监测电动阀的位置,如果处于关闭状态则系统报警;如果电动阀正常打开则启动空气压缩机。空气压缩机启动达到正常转速后打开电动阀3702,监测电动阀3702的状态,如果没有正常打开则系统复位为初始状态;如果电动阀3702正常打开则接着关闭电动阀3704,如果电动阀3704没有正常关闭则系统复位为初始状态,否则空气压缩机继续工作进行排载作业;这期间如果出现空气压缩机报警或是TT3703监测的温度超过70℃或者中控发出ESD关机信号,则电动阀3704打开,电动阀3701和3702关闭,压缩机停止,同时系统复位到初始状态。如果没有以上情况出现,就一直运行排载作业至排载结束复位到初始状态。
空气压缩机初始假设处于停机状态,电动阀3701~3704都处于关闭状态。压载启动的控制过程:首先打开电动阀3703,但在打开电动阀3703之前需保证水分罐的液位开关LSHH-3701无报警,同时监测电动阀3703的开关状态,如果电动阀3703没有打开则进行系统报警,确定已经打开后启动空气压缩机同时打开电动阀3704。然后检测空气压缩机和电动阀3704的状态,如果空气压缩机没有启动则系统报警,如果电动阀3704没有打开则返回初始状态,如果空气压缩机和电动阀3704状态都正常则空气压缩机继续运行同时监测水分罐液位LT-3701。如果LT-3701的液位低于0mm则电磁阀SV3701关闭,如果液位高于450mm则电磁阀SV3701打开。这期间如果出现空气压缩机报警或是TT3703监测的温度超过70℃,则电动阀3703和3704关闭,同时系统复位到初始状态。如果没有以上情况出现,那么就一直运行压载作业至压载结束后复位到初始状态。

图5 压载空气压缩机系统控制流程
5 结束语
半潜式自航工程船的压载空压机系统是由海洋石油工程股份有限公司组织技术力量进行自主研发的,并在此基础上进一步深化研究,该系统首次在半潜式自航工程船压载系统成功应用后,设备一切功能运行正常,证明了该设计方案的可行性。这不但打破了国外公司在此领域的设计垄断,也为今后在此领域的工作奠定了基础。
