基于三相独立H 桥的电压空间矢量PWM 控制方法
2015-01-13黄梁松李玉霞张志献朱苏宁
黄梁松,李玉霞,张志献,朱苏宁
(山东科技大学,青岛266590)
0 引 言
由于具备低速大扭矩、高动态响应和高控制精度等特点,交流永磁同步力矩电动机目前在半导体制造装置、精密机床、精密测试仪器等行业有着越来越多的应用[1-4]。对于力矩电动机而言,提高输出转矩的方法基本分两类,一类是在电机外形尺寸不变的情况下,通过提高电机的电源供电电压来增大电机绕组的电流,但该方法会提高电路系统的电压等级,降低电路抗干扰能力和可靠性;另一类是根据电机的输出转矩与其直径成正比的关系,改变电机的外形尺寸,增大电机的转子和定子直径,但该方法不适合对尺寸有严格要求的应用环境[5]。因此,如何在不提高供电电压等级不改变电机尺寸的情况下提高转矩输出是某些特殊行业应用力矩电动机需要解决的关键问题。
三相独立H 桥驱动电路是目前解决这一问题有效措施。这种驱动电路由三个独立的H 桥并联组成,每个H 桥控制电机的一相绕组,可在不增加电源供电电压、不改变电机尺寸的情况下提高电机的输出转矩。由于该驱动电路的拓扑结构不同于常用的三桥臂电路,传统的电压空间矢量PWM 控制方法不再适用,因此需要发展一套针对该驱动电路的电压空间矢量PWM 控制方法。
本文针对三相独立H 桥驱动电路提出了一种全新的电压空间矢量PWM 控制方法,该方法通过长短矢量和零矢量在内的14 个基本电压空间矢量形成了正六边形内切矢量圆轨迹,将矢量圆划分为12 个扇区,并设计了矢量作用时间的计算方法和扇区的确定方法。
1 三相独立H 桥电路的结构
三相独立H 桥驱动电路如图1 所示,该驱动电路由A,B 和C 三个独立的H 桥驱动电路并联组成,每个H 桥电路包括4 个带有续流二极管的开关器件,每个H 桥连接电机定子的一相绕组,有正向导通、反向导通和关断三种工作状态。
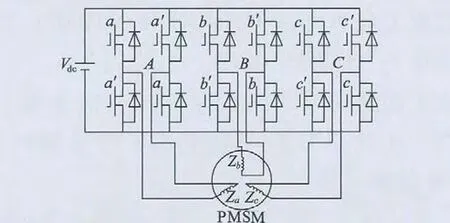
图1 三相独立H 桥驱动电路
2 三相独立H 桥电路的电压空间矢量
如图1 所示,H 桥A 控制力矩电动机绕组Za,当标识a 的两个开关器件导通,标识a'的两个开关器件关闭时,定义H 桥A 为正向导通并用“1”表示;当标识a 的两个开关器件关闭,标识a'的两个开关器件导通时,定义H 桥A 为反向导通并用“-1”表示;当四个开关器件全部关闭时,定义H 桥A 为关断并用“0”表示。同理,可定义H 桥B,H 桥C 的三种工作状态。
由于永磁同步力矩电动机的三相定子绕组在空间位置上互差120°,使用三相独立H 桥电路进行驱动时,根据每个H 桥的工作状态可定义施加在每相定子绕组上具有大小和方向的三个电压矢量,并且三个矢量依照平行四边形法,则可以合成一个电压空间矢量。根据三个H 桥的开关模式共组合成27个工作状态,即27 个电压空间矢量,排除幅值较小和物理上不可实现的矢量,从中选出14 个基本电压空间矢量,按照a 相、b 相、c 相顺序排列,其中包括6 个长矢量:1-1-1、11-1、-11-1、-111、-1-11、1-11;6 个短矢量:10-1、01-1、-110、-101、0-11、1-10;2 个零矢量:111 和-1-1-1。
14 个电压空间矢量形成了如图2 所示的六边形的矢量轨迹。其中,在矢量空间中6 个长矢量和6 个短矢量以原点为中心间隔30°角扇形排列,分别标记为U0~U330;两个零矢量在原点处,标记为O111和O-1-1-1。12 个矢量首尾相接形成封闭的正六边形电压矢量轨迹,正六边形的内切圆即是进行电机电压空间矢量PWM 控制所需的电压矢量圆,其半径为短矢量的最大幅值。
如图2 所示,12 个基本电压空间矢量将电压矢量圆分割成编号为I ~XII 的12 个扇区,每个扇区边缘是两个相差30°角的长短基本电压空间矢量。在一个PWM 周期内,当期望输出的电压空间矢量Uout落在某个扇区内时,就用该扇区边缘的两个长短基本电压空间矢量按照平行四边形法,则线性合成期望输出的电压空间矢量。
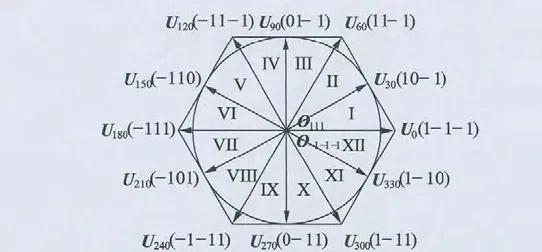
图2 基本电压空间矢量和扇区分布示意图
电压空间矢量的幅值等效为在PWM 周期内该矢量的作用时间,每个PWM 周期等于期望输出的电压空间矢量的作用时间和零矢量的作用时间之和。设PWM 周期为T,如果期望输出的电压空间矢量Uout落在I 扇区内,则该矢量由U0,U30线性合成,其作用时间分别设为T1,T2,由此可得如下表达式:

期望输出的电压空间矢量Uout经过Park 逆变换后转变为α,β 坐标系下的矢量Uα和Uβ,如图3 所示,由此可得T1,T2的表达式如下所示:
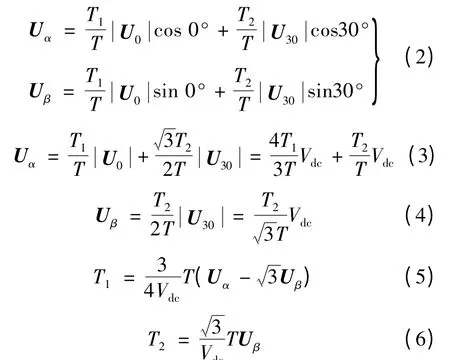
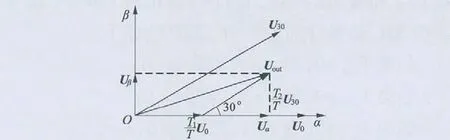
图3 三相独立H 桥电压空间矢量的线性组合示意图
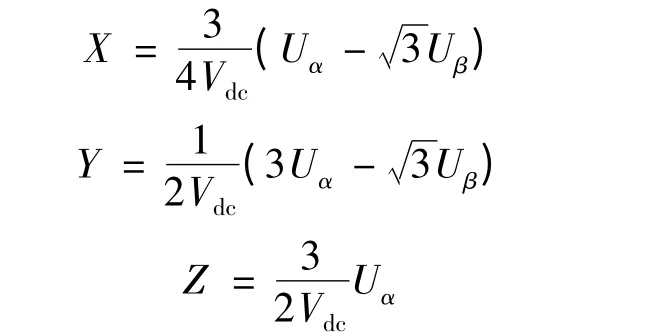
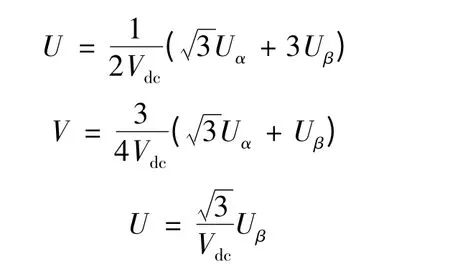
同理,可以求得期望输出的电压空间矢量落在其他扇区内时,线性合成该矢量的长短基本电压空间矢量的作用时间。根据上述计算方法,所有12 个扇区内合成矢量所需的长短基本电压空间矢量的作用时间可由6 个基本表达式确定,用X,Y,Z,U,V,W代表这6 个基本表达式,可设:
设t1为扇区内角度小的基本电压空间矢量的作用时间,t2为扇区内角度大的基本电压空间矢量的作用时间,则可得到扇区与基本电压空间矢量作用时间的对应关系,如表1 所示。
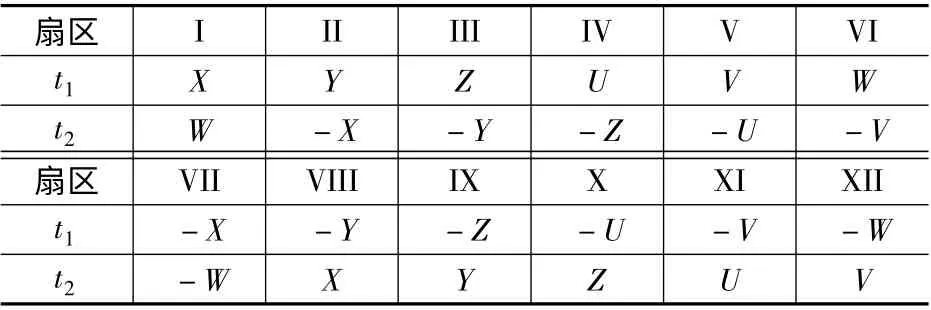
表1 扇区与基本电压空间矢量导通时间的对应关系
在确定期望输出的电压空间矢量Uout所处的扇区后,即可根据上表确定长短基本电压空间矢量的作用时间,确定扇区的算法如下:
将Uα和Uβ进行Clarke 逆变换,可得如下表达式:
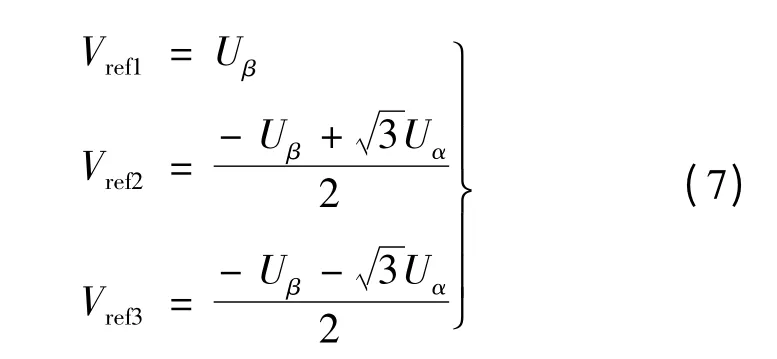
根据变换后的Vref1,Vref2和Vref3值即可确定扇区,其过程共分两步:
第一步,首先确定6 个基本长矢量之间的大扇区,即I 和II,III 和IV,V 和VI,VII 和VIII,IX 和X,XI 和XII,编号分别为1 ~6,其算法如下:
如果Vref1>0,则a=1,否则a=0;
如果Vref2>0,则b=1,否则b=0;
如果Vref3>0,则c=1,否则c=0;
大扇区号=4c+2b+a。
第二步是根据大扇区号确定最终的扇区号,其算法如下:
如果大扇区号是1,即I 和II,则如果Vref2>0,扇区号为II,否则为I;
如果大扇区号是2,即III 和IV,则如果Vref1>0,扇区号为III,否则为IV;
如果大扇区号是3,即V 和VI,则如果Vref3>0,扇区号为VI,否则为V;
如果大扇区号是4,即VII 和VIII,则如果Vref2>0,扇区号为VII,否则为VIII;
如果大扇区号是5,即IX 和X,则如果Vref1>0,扇区号为X,否则为IX;
如果大扇区号是6,即XI 和XII,则如果Vref3>0,扇区号为XI,否则为XII。
为了使逆变电路输出的波形对称,在每个PWM周期内三相独立H 桥驱动方式采用通用的七段式SVPWM 波形。
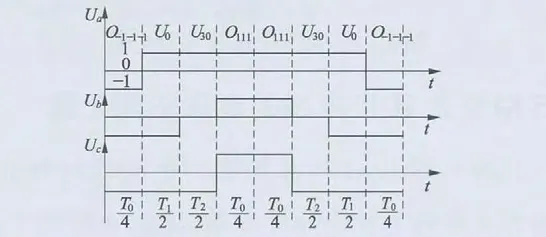
图4 三相独立H 桥第I 扇区SVPWM 波形
3 控制方法的优缺点分析
三相独立H 桥驱动方式的优势有如下几点:
(2)传统的三桥臂驱动方式为了防止上下两个桥臂互通,必须要在每个PWM 周期内设定死区,不仅会降低电压利用率,而且死区会产生电流纹波脉动,影响电机的控制性能和电路的可靠性。而三相独立H 桥驱动方式由于电机的每相绕组由一个独立的H 桥控制,每相绕组通过的电流只有在过零点进行换相,并且由于换相时PWM 导通时间为零,因此不存在死区问题,不会产生电压损失和纹波电流。
(3)由图2 可知,由于三相独立H 桥驱动电路电压空间矢量算法中的基本电压空间矢量有12 个,而传统方式中只有6 个,因此采用三相独立H 桥驱动方式转矩的调节精度是传统方式的2 倍,有助于提高电机的控制性能。
由于三相独立H 桥驱动方式需要使用12 个开关器件,在一定程度上增加了硬件成本,并且该驱动方式不像传统驱动方式存在三相绕组的星形结点,因此无法消除电流中的3 次谐波,当电机转速较高时,会形成转矩脉动而影响电机运行的平稳性,无法通过硬件或软件方式消除。但对于某些特殊行业中的直驱传动应用,力矩电动机的最高转速一般不超过500 r/min,3 次谐波的影响较小,可通过速度闭环控制消除,对电机的运行不会产生影响。并且,该驱动方式可在不提高供电电压和电机尺寸的情况下,有效提高最大转矩及其调节精度,消除死区带来的不利因素,具有较好的实用性。
4 可行性验证
为了验证控制方法的可行性,笔者通过基于三相独立H 桥的力矩电动机伺服控制进行电压空间矢量PWM 控制的实验,该系统如图2 所示,包括驱动器、交流永磁同步力矩电动机和上位机,其中驱动器以DSP 芯片TMS320F2812 为控制核心,驱动电路采用三相独立H 桥结构,供电电压为12 V。

图5 力矩电动机伺服控制系统
三相交流永磁同步力矩电动机的技术参数如表2 所示。
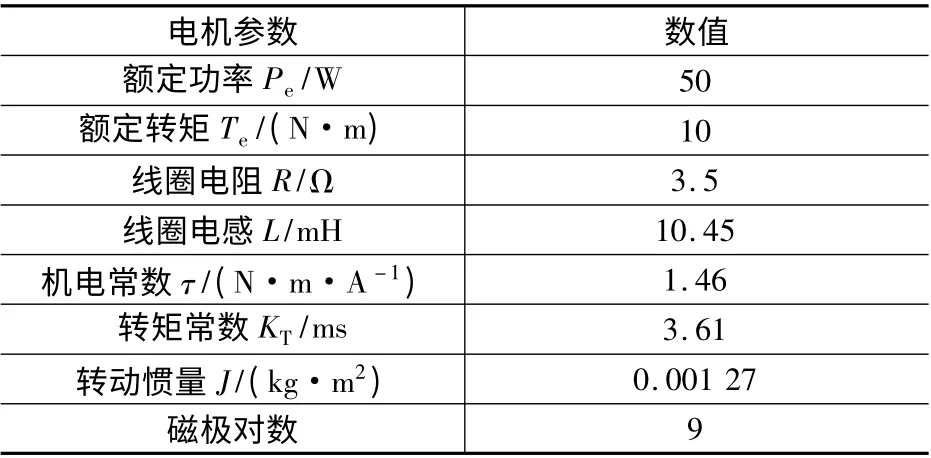
表2 力矩电动机技术参数
控制器软件中采用的是本文中的基于三相独立H 桥驱动技术的电压空间矢量PWM 算法,采用该算法会在电机单相绕组上施加类似马鞍型的相电压,电机A 相和B 相的电压如图6 所示。
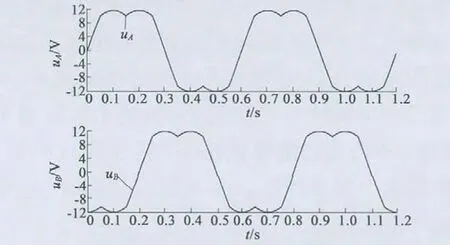
图6 三相独立H 桥驱动电路相电压曲线
在电源电压不变的情况下,马鞍形电压的有效值是三桥臂驱动电路SVPWM 控制方式形成的正弦电压的2 倍,因此其各相绕组电流的有效值以及三相马鞍形电流形成的最大转矩也是三桥臂驱动电路的2 倍。
当力矩电动机以5 r/min 的速度带载低速运行时,由于转速较低,反向电动势较小,在电机三相绕组上产生类似马鞍形的相电流,A 相和B 相的电流如图7 所示。
当电机以50 r/min 的速度带载运行时,由于电机绕组中施加了马鞍形的相电压,而电机旋转时产生的反向电动势为正弦曲线,因此在电机绕组上产生的电流曲线形状为马鞍形与正弦叠加后的形状,A 相和B 相的电流如图8 所示。
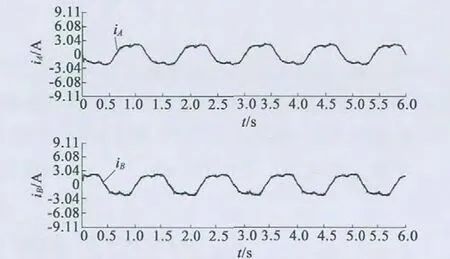
图7 电机堵转时相电流曲线
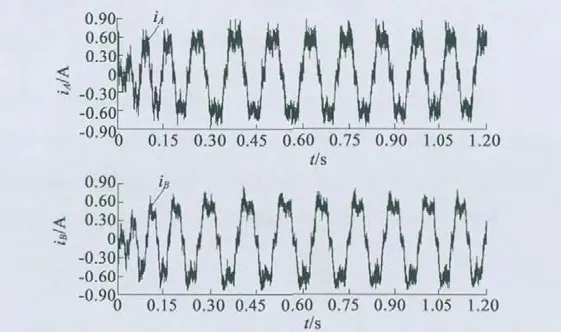
图8 电机运行时相电流曲线
5 结 语
本文提出了一种基于三相独立H 桥驱动电路的电压空间矢量PWM 控制方法,旨在为某些特殊行业和场合应用力矩电动机提供一种有效的解决方法。该方法通过基本电压空间矢量形成了正六边形内切矢量圆轨迹,并将矢量圆划分为12 个扇区,通过独特的矢量作用时间计算方法和扇区确定方法,使得电机可以产生比传统驱动方式大1 倍的最大转矩和转矩调节精度,实际运行的结果也表明了该方法的可行性。
[1] 黄梁松,曲道奎,徐方.永磁同步直驱伺服电动机的模型校正控制[J].微特电机,2010,38(5):49-52.
[2] 张杭,崔巍,苗会彬,等.永磁同步力矩电机直驱式伺服系统矢量控制策略综述[J].微电机,2010,43(12):82-86.
[3] 赵彤,王先逵,刘成颖,等. 机床进给用永磁同步直线伺服单元的设计与实验研究[J].中国机械工程,2006,17(23):2421-2425.
[4] 吕爱群.高性能直接驱动交流力矩伺服系统[J]. 伺服控制,2005,(9):58-60.
[5] 唐任远.现代永磁同步电机理论与设计[M]. 北京:机械工业出版社,2002.
[6] 阮毅,陈伯时.电力拖动自动控制系统[M].4 版.北京:机械工业出版社,2012.