基于二阶积分滑模的永磁同步电动机速度控制方法
2015-01-13鲁义宽
鲁义宽
(鄂尔多斯职业学院,鄂尔多斯017000)
0 引 言
永磁同步电动机是一个典型的非线性、多变量耦合系统,其控制性能在实际使用过程中往往受到机械参数的变化、外部负载扰动、内部参数变化和非线性动态特性等不确定性的影响[1]。永磁同步电动机(以下简称PMSM)具有效率高、可靠性高、结构简单、体积小、重量轻等优点,可满足控制系统对响应速度、控制精度的要求[2]。为了获得良好的动态响应,提高电机的控制性能,一些鲁棒控制方法被应用到电机控制中,如非线性控制[3]、自适应控制[4]、神经网络控制[5]、模糊控制[6]和滑模控制[7](以下简称SMC)等。其中,因SMC 拥有良好的鲁棒性和快速响应等优点,从而被广泛应用到电机控制中。但是传统的滑模控制也存在一些缺点,例如电机在低频高频切换作用下易产生“抖振”现象。
本文提出了一种基于二阶滑模控制方法,此方法在保留滑模控制优点(抗干扰性、高鲁棒性、快速动态响应)的同时,能够有效消除电机的抖振现象。通过Lyapunov 函数设计了滑模控制律,并针对二阶积分存在饱和现象对二阶滑模进行了抗饱和设计。
1 PMSM 调速系统Windup 问题
1.1 PMSM 数学模型
建立如图1 所示的两相静止坐标系和两相同步旋转坐标系,α 轴与A 轴方向相同,d 轴与PMSM 转子永磁体基波磁场轴线方向相同,ω 为电机转子旋转的电角速度。
通过Clarke 变换和Park 变换,在两相旋转坐标系下,PMSM 数学模型主要包括磁链方程、电压方程、转矩方程、运动方程和状态方程。其中磁链方程:

式中:ψd,ψq分别对应d 轴和q 轴的磁链;Ld,Lq分别对应d 轴和q 轴的电感。
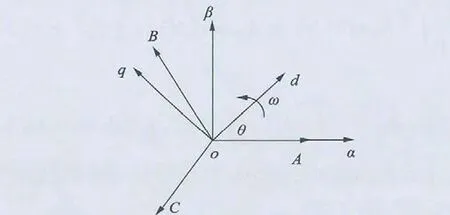
图1 两相静止和两相同步旋转坐标系
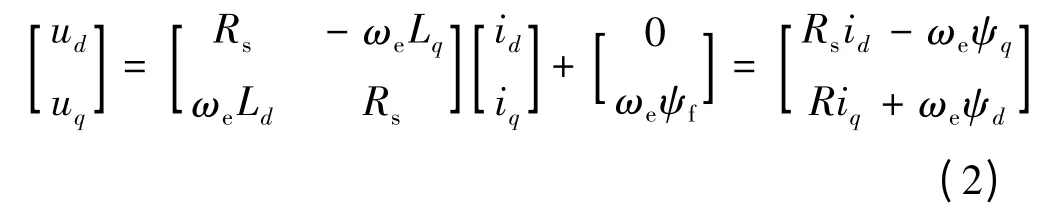
电压方程:
式中:ud,uq分别对应d 轴和q 轴的电压。转矩方程:

本文研究对象是表贴式PMSM,一般情况下,其d 轴和q 轴电感基本相等,那么转矩方程可简化:

运动方程:

式中:TL为负载转矩;J 为转动惯量;ωr为转子机械角速度;B 为粘滞摩擦系数。
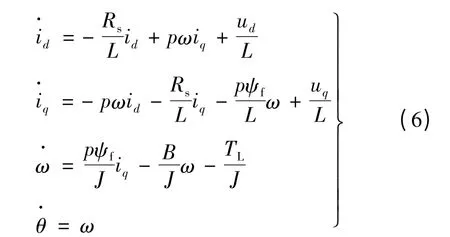
有式(1)、式(2)、式(3)、式(5)可以得到PMSM的状态方程:
1.2 PMSM 系统中的Windup 现象分析
当PMSM 控制器中存在积分控制环节时,由于PMSM 和逆变器等本身物理条件限制或者对控制系统中的输入量采取限制以保护系统安全,在此情况下通常会导致系统产生Windup 现象[8],从而影响PMSM 控制系统性能,影响了控制系统的稳定性。因此PMSM 控制器产生Windup 现象的原因可以总结为以下两点[9]:
(1)电机调速控制器中本身存在静态Windup限制[10-11],即系统物理限制或者对输入量采取保护限制。
(2)因为控制器中存在微积分环节,当系统产生误差时误差会不断进行积累。由于Windup 现象能够导致电机控制性能降低,甚至严重影响控制系统稳定性,因此当PMSM 中存在积分环节时,必须采取有效措施对Windup 现象进行抑制,以提高电机控制系统稳定性。
2 PMSM PI 控制器抗饱和方法
为了保证PMSM 控制器中的微积分环节输出值能够保持在允许范围内,一些学者提出了很多抗饱和(Anti-Windup)算法,如Anti-reset Windup 算法、条件积分算法等,而Anti-reset Windup 算法拥有线性反馈特性,易于设计和应用而得到广发应用。
2.1 传统的Anti-reset Windup PI 控制方法
传统的Anti-reset Windup PI 控制原理如图2所示。该控制方法是在线性范围内,误差被积分。
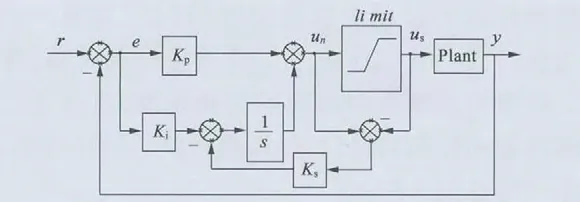
图2 传统Anti-reset Windup PI 控制原理
当un=us时,

当un≠us时,
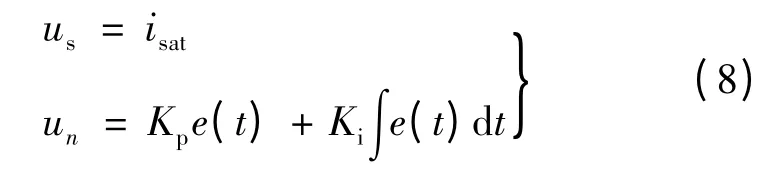
其中,isat表示系统饱和时控制器的最大输出。
传统的抗饱和PI 控制器控制结构相对简单,便于使用。但该方法没有在控制系统中充分发挥比例环节的作用,补偿精度较低。
2.2 改进的Anti-reset Windup PI 控制方法
当un=us时,

当un≠us时,
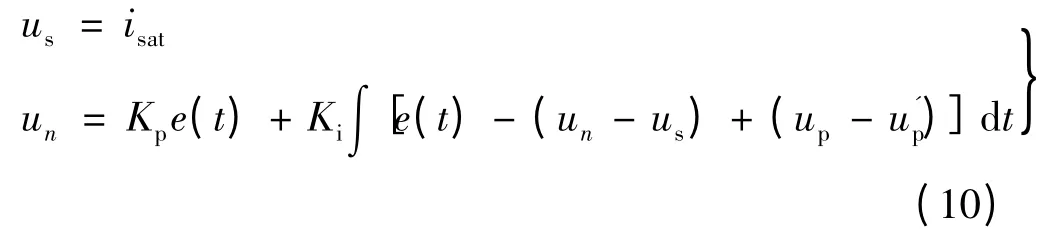
改进后的抗饱和控制原理如图3 所示。主要是对饱和有影响的积分环节和比例环节进行分开处理,这样即可以充分发挥比例环节在控制系统中的作用,又可以降低因为输出饱和而产生Windup 现象,提高了系统的动态性能。

图3 改进Anti-reset Windup PI 控制原理
3 二阶积分滑模控制器设计
3.1 二阶滑模控制律设计
PMSM 在传统PID 控制过程中,鲁棒性和动态响应性较差,电机速度跟踪期望速度误差大,而且一阶滑模控制的过程中容易出现“抖振”现象。所以本文针对以上缺陷提出了二阶滑模控制策略,并针对二阶滑模控制器中出现的饱和现象,进行了二阶滑模抗饱和控制器设计,以提高控制器整体性能,控制器结构如图4 所示。
算法:设g:H→H是单值映射,Ni:H→H(i=1,2)是单值映射;A,B:H→C(H)是集值映射,设泛函 φ:H→是真凸下半连续,次可微的,且 g(u)∈∂φ其中∂φ表示φ的次微分。
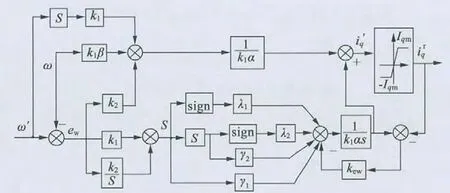
图4 二阶滑模抗饱和控制器结构
假设状态误差方程:

式中:ω'为电机的期望速度;ω 为电机的实际速度。由式(6)可以得到电机的速度误差:


速度微分误差方程式(12)是有速度误差方程式(10)一阶得到的,为了降低一阶滑模控制产生的“抖振”现象,提高动态性能和速度跟踪精度,滑模面选择积分形式,方程如下:

式中:k1,k2为比例增益和积分增益,k1,k2均为大于零的常数。
根据式(11)、式(13),滑模控制律设计形式:

式中:λ1,λ2,γ1,γ2为设计参数,γ1>0,λ2=λ21+λ22,λ21>k1‖‖,λ22>0,γ1>0,且γ2>0 ,则系统误差式(11)将会收敛于零。
假设李雅普诺夫函数[11]:

求导可得:


因此根据式(14)~式(16)可得:
根据上面提到的λ21>k1‖‖,λ22>0,γ2>0,可以得到:


由上式可以求得:

式中:ζ >0,ki=是大于零的常数。因此当k1,k2取适当值时,式(24)的根ew能够满足=0,而‖‖=0 时跟上述情况类似,在此不作论述,因此速度误差能够收敛于二阶滑模上,保证了系统的稳定性。
3.2 二阶积分滑模抗饱和控制器设计
由前面分析的PMSM 出现饱和现象分析可以看出,在设计的二阶积分滑模控制器中存在微积分环节,控制系统也会出现饱和现象从而影响控制系统整体稳定性。为了提高二阶积分滑模控制算法的稳定性。根据改进的抗饱和PI 控制原理,二阶积分滑模抗饱和控制器设计:
4 仿真实验
为验证上述算法的可行性,基于MATLAB 软件设计改进后的PMSM Anti-reset Windup PI 控制算法,以及二阶积分滑模抗饱和控制算法,并对该算法进行了仿真实验,同时将仿真结果与PI 控制器仿真结果(仿真条件相同)进行对比。电机和控制器的主要参数如表1、表2 所示。
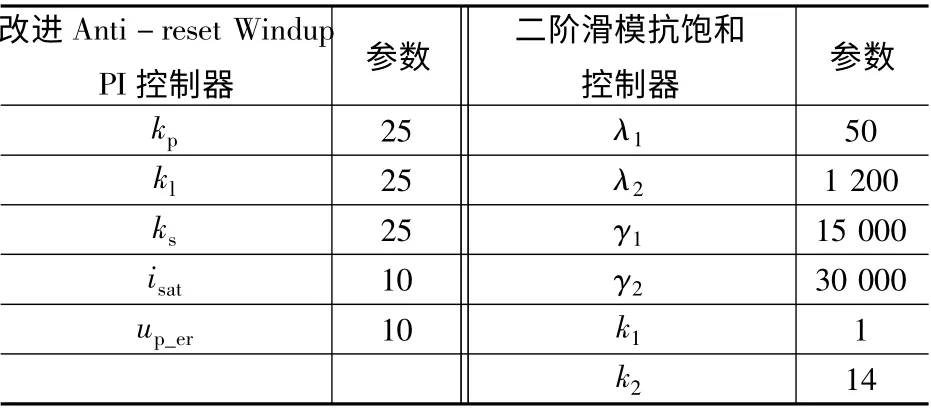
表1 控制器主要参数
(1)传统抗饱和控制器和改进抗饱和控制器仿真实验。实验中输入信号为脉冲阶跃信号,仿真实验结果如图5、图6 所示,图5 是PMSM 速度响应曲线,图6 是PMSM 速度误差曲线。通过仿真实验结果可以看出,改进后的Anti-reset Windup PI 控制能够提高电机动态响应和补偿精度,提高了电机的控制精度。
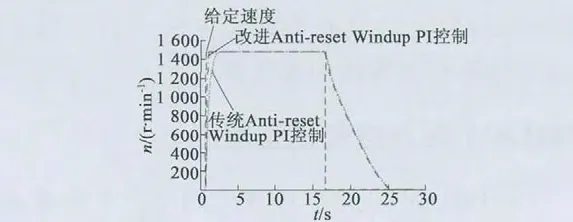
图5 改进Anti-reset Windup PMSM 速度曲线
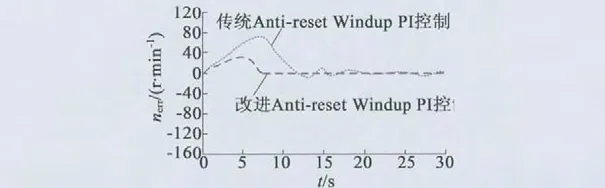
图6 改进Anti-reset Windup PMSM 速度误差曲线
(2)为验证二阶积分滑模抗饱和控制器在存在外部扰动情况下控制系统的鲁棒性,如图7 所示,控制系统分别采用PI、一阶滑模、二阶滑模抗饱和控制方法时,控制系统在阶跃信号作用下速度阶跃相应曲线,图8 为速度误差曲线。通过图7、图8 可以看出,二阶滑模抗饱和控制方法相比于普通PI、一阶滑模控制,控制系统响应速度更快,速度跟踪精度更高,因此二阶滑模抗饱和控制能够有效抑制电机“抖振”现象,提高了系统的稳定性。
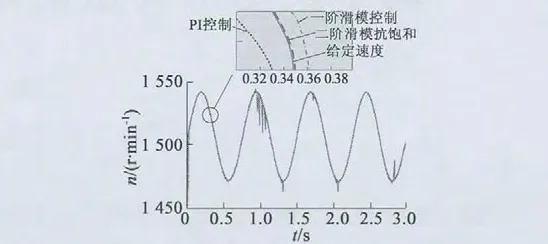
图7 二阶积分滑模抗饱和控制速度曲线
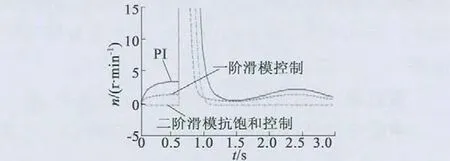
图8 二阶滑模抗饱和控制系统速度误差
5 结 语
本文提出了一种基于二阶积分滑模控制器的PMSM 速度控制方法,通过对传统的抗饱和PI 控制策略的改进,有效提高系统控制精度。为了进一步提高PMSM 系统的稳定性,提出了一种基于二阶积分滑模的控制方法以实现对电机速度的跟踪控制,并针对二阶积分滑模存在的饱和问题,对二阶积分滑模进行了抗饱和设计。仿真实验证明,本文所提出的二阶积分滑模控制系统具有更快的速度响应性,较高的鲁棒性,以及较好的速度误差补偿性。
[1] 王鑫,李伟力,程树康.永磁同步电动机发展展望[J].微电机,2007,40(5):69-72.
[2] ANDON V T,GIUSEPPE L C,VINCENZO G et al. Sliding mode neuro-adaptive control of electronic drives[J].IEEE Transactions on Industrial Electronics,2007,54(1):671-679.
[3] RACHID E,MOHAND O. Nonlinear predictive controller for a permanent synchronous motor drive[J].Mathematics and Computer in Simulatin,2010,81(2):394-406.
[4] MOHAMED Y A R I,EI-SAADANY E F.A current control scheme with an adaptive internal model for torque ripple minimization and robust current regulation in pmsm drive systems[J].IEEE Transactions on Energy Conversion,2008,23(1):92-100.
[5] CHANG S H,CHEN P Y,TING Y H,et al.Robust current controlbased sliding mode control with simple uncertainties estimation in permanent magnet synchronous motor drive systems [J]. Electric Power Application,IET,2010,4(6):441-450.
[6] 张月玲,党选举.基于死区迟滞函数的永磁同步直线电机滑模控制[J].中国电机工程学报,2011,31(3):67-74.
[7] 曲永印,白晶,周振雄,等.自适应逆控制的异步电机变频调速系统[J].控制与决策,2007,22(7):821-824.
[8] TTKIN V I.Variable structure systems with sliding modes[J].IEEE Transactions on AutomaticControl,1997,22(2):212-222.
[9] 张家明,卢京潮.积分滑模控制在飞控中的应用[J].系统仿真学报,2009,21(13):4069-4071.
[10] BAI K I C,KIM K H,YOUN M J.Robust nolinear speed control of PM synchronousmotor using boundary layer integral slidingmode control technique[J]. IEEE Transactions on Control Systems Technology,2000,8(1):47-54.
[11] 杨南方,骆光照,刘卫国. 误差补偿的永磁同步电机电流环解耦控制[J].电机与控制学报,2011,15(10):50-54.