一种基于AD 转换装置的肌电假手设计
2015-01-13易昌中
易昌中
(宜春学院 数学与计算机科学学院,江西 宜春 336000)
手是人类重要的工具,一旦失去讲给生活带来极大地不便,于是各种高功能的假手出现了。肌电假手就是其中的一种。利用残存肌肉的肌电信号控制假手动作称为肌电假手。[1]高功能肌电假手在动作方式、精确程度、稳定性等方面得到了极大地提高。[2]但是,肌电假手的这些发展和进步主要发生在欧美和日本这些科技发达的国家,我国假肢行业发展比较滞后,当前面临着假肢产品数量不足、质量价差、缺乏社会化生产方式等特点。因此国内很多因为事故而失去手的患者得不到性能优良价格合理的肌电假手产品,这也需要国内的科学界加大对肌电假手的研究力度,来满足国内那些对肌电假手强烈需求的患者。[3]
1 肌电假手的基本控制原理
人体的各个动作是靠大脑和神经来控制的,而神经的本质是电信号,患者虽然失去了双手,但是残存在肌肉里的肌电信号仍然存在,这是肌电假手设计的先决条件。利用传感器将残存肌肉里的肌电信号采集出来,通过模数转换器得到离散的肌电信号,再通过控制器对肌电信号进行处理,输出控制信号控制假手实现各种功能。[4]肌电假手控制原理如图1。
研究采有现成的肌电传感器,所做的工作重点是实现对采集的肌电信号进行AD 转换,为了提高假手的功能,需要对肌电信号的跟踪速度快、精度高,为此本文着力于实现以上两点,为控制器提供实时的、高精度的肌电信号。
2 A/D 转换的实现
由于传感器从残肢获取的肌电信号属于模拟信号,而控制器所能够处理的信号为数字信号,所以有必要对所得到的模拟信号进行处理。
2.1 A/D 转换基本原理
将模拟信号转换成数字信号的设备叫做模数转换器。AD 转换器的分辨率用输出二进制数的位数表示,位数越多,误差越小,转换精度越高。对于肌电假手所需的信号,必须确保一定的分辨率,才能有利于控制器对信号的识别。AD 转换器的相对精度是指实际的各个转换点偏离理想特性的误差。AD 转换器的转换速度是指完成一次转换所需的时间。转换时间是指从接到转换控制信号开始,到输出端得到稳定的数字输出信号所经过的这段时间。由于得到的信号是采样开关和保持器环节输出地,所以要保证转换时间和采样周期的一致性。AD 转换的流程如图2:
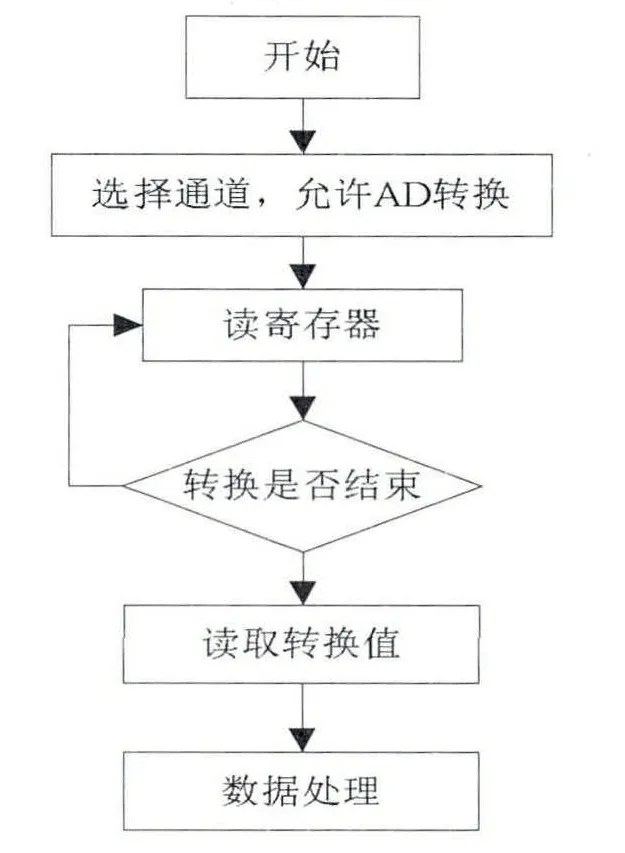
图2 AD 转换程序流程图
2.2 当前AD 转换器现状
当前市面上常见的AD 转换器主要有并联比较型、逐次逼近型、双积分型等类型的转换器。[5]其中双积分型的转换效率较低,转换一次至少需要2n+1Tc 时间,其中Tc 为一个时钟脉冲。无法达到高速转换这一要求。而并联比较型和逐次逼近型转换效率较高,下面重点讨论这两种AD 转换器。
3 位并联比较型的AD 转换器结构如图3:

图3 3 位并联比较型ADC
由图3 可知,3 位并联比较型ADC 转换器由电压比较器、寄存器、编码器等构成,各电压比较器由基本的电阻和集成运算放大器构成。对于n 位的并联比较型AD 转换器,其分压电阻为2n 个,放大器为2n-1 个。由于并联比较性AD 转换器采用各量级同时比较,各位输出码也是同时并行的,所以它的转换速度是非常快的,仅需要一个脉冲就可以输出二进制结果。当前市面上集成的TDC1007J 型8 位并联比较型AD 转换器最高转换速率可达30MHz。这一转换速度是其它类型的转换器比拟的。[6,7]
3 位逐次逼近型AD 转换器的的结构如图4:

图4 3 位逐次逼近型ADC
由图4 可知,3 位逐次逼近型AD 转换器同并联比较型AD 转换器一样,也是通过比较来实现AD 转换的,不同的是此转换器是通过逐次比较来实现的,对于一个n 位的逐次逼近型AD 转换器,仅用n 个JK 触发器和一个n 位DA 转换器就可以实现其AD 转换功能。通过对n 位并联比较型ADC和n 位主次逼近型ADC 的比较可得:
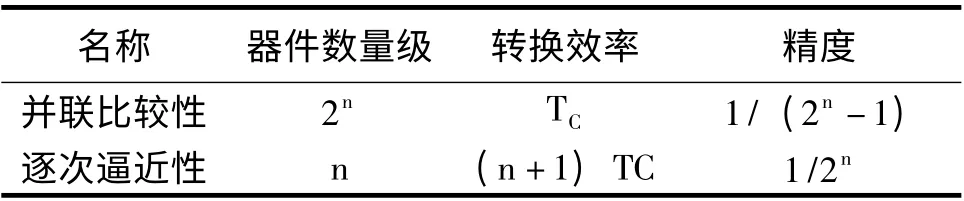
表1 两种ADC 的性能比较
由表1 可知,并联比较型用了较多的器件实现了高效率的转换,而逐次逼近型用了较少的器件却付出了转换周期长的代价。
2.3 高功能AD 转换器的设计
为了对采集的肌电信号实时处理,所设计的ADC 必须保持高效的转换效率;由于转换器要作为肌电假手的一部分,质量不宜过大,所以必须减少所用的元器件的个数。总之速度、质量、精度是重点考虑的三个方面。
用单一的并联比较型ADC 来实现16 位的AD转换,需要216 个电阻和216 个放大器,虽然可以保证高效的转换效率(即:一个时钟脉冲内完成转换),但是器件的个数却十分巨大。用单一的逐次逼近型ADC 来实现AD 转换,虽然仅仅需要16个DAC 和16 个JK 触发器,但是完成一次转换却需要16 个时钟脉冲,这样的速率是无法保证实时跟踪肌电信号的,所以我们要对以上两种ADC 进行综合,进而设计出高效率、高精度、轻质量的ADC。
利用两个四位的并联型ADC,通过两次逼近进而实现8 位精度的AD 转变换,其原理如图5。

图5 高功能ADC 原理图
图5 中的ADC_ 1 和ADC_ 2 均为四位并联比较型AD 转换器,DAC_ 1 为四位的DA 转换器,其工作原理为:首先通过ADC_ 1 对模拟信号A1进行AD 转换,得到数字信号值D 1,其误差为1/24,然后将D 1 转换成模拟信号A2,再通过对A1-A2 求差,得到四位转换时的误差,然后对再次进行AD 转换,此时的精度为(1/24)2 也就是1/28,然后用设计好的8 位AD 转换器再次通过相同的原理进行组合,进而设计出16 位的AD 转换器。
一个8 位的ADC,所用电阻器件为4 位ADC的两倍,即:24* 2 个,而完成一次转换时间为4位的两倍,即2* TC。同理,16 位时所用器件和时间分别为24* 2* 2 和2* 2* TC,下面将传统的16 位并联比较型ADC、逐次逼近型ADC 和本文所设计的16 位ADC 进行比较,如表2。

表2 三种16 位ADC 性能比较
通过表2 可知,三种16 位的AD 转换器的精度基本相同,都约为1/216,而从器件和转换效率的角度考虑,本文所设计的ADC 比并联比较型的器件少用1024 倍,而转换效率仅仅满了4 倍,比同等精度的逐次逼近型ADC 的转换速度要快4 倍,可以满足对肌电信号的实时处理。
3 结束语
本文在研究肌电假手的课题中,参与AD 转换这一环节,基本满足了控制器所需要的肌电信号的处理。利用现有的器件进行重新的组合,进而实现更高质量的器件的功能,对于开发其它系统,也有一定的借鉴意义。
[1]章华涛. 带触觉的肌电假手握力模糊控制方法[J]. 仪器仪表学报,2013,34(7):1559-1565.
[2]张冰珂. 基于肌电信号的多模式抓握力估计[J]. 计算机应用,2015,35(7):2109-2112.
[3]杨大鹏. 基于预抓取模式识别的假手肌电控制方法[J]. 机械工程学报,2012,48(15):1-8.
[4]李晶. 基于抓握可靠性的肌电控制假手优化和动态性能研究[J]. 机械科学与技术,2014,33(7):965-970.
[5]官龙. 握速可调式肌电假手的系统研究[J]. 中国生物医学工程学报,2013,32(4):471-476.
[6]吴常铖. 一种肌电假手的自适应模糊控制方法[J]. 仪器仪表学报,2013,34(6):1339-1345.
[7]张恒毅. 有源柔性表面肌电电极阵列设计[J]. 电子测量与仪器学报,2014,28(8):901-908.
