基于Simulink的水轮机调节系统频率扰动仿真研究
2015-01-11陈功贵杜阳维郭艳艳唐贤伦
陈功贵, 杜阳维, 郭艳艳, 唐贤伦
(1. 重庆邮电大学 复杂系统分析与控制研究中心, 重庆 400065;2. 武汉铁路职业技术学院 机车车辆工程系, 湖北 武汉 430205)
虚拟仿真技术探索与实践
基于Simulink的水轮机调节系统频率扰动仿真研究
陈功贵1, 杜阳维1, 郭艳艳2, 唐贤伦1
(1. 重庆邮电大学 复杂系统分析与控制研究中心, 重庆 400065;2. 武汉铁路职业技术学院 机车车辆工程系, 湖北 武汉 430205)
运用计算机仿真技术进行了水轮机调节系统频率扰动的实验研究。在机组空载频率扰动工况下,改变调速器参数及被控系统参数进行仿真实验。仿真结果表明:不同参数组合对系统频率扰动性能优劣程度影响极大,基于Simulink仿真可为调节系统频率扰动寻求到控制效果良好的参数组合。通过仿真实验,可加深学生对水轮发电机组频率扰动PID调节规律的认识和理解,提高学生运用仿真技术对水轮机组频率扰动问题评价的能力。
水轮机; 调节系统; Simulink; 空载频率扰动; 仿真实验
水轮机调节系统是一个结构复杂的非线性控制系统。为了保证用电安全及电能质量,需要不断地调节水轮发电机组有功功率的输出,以使系统的频率保持在规定范围内[1-4]。水轮机调节系统运行工况主要有负荷扰动和空载频率扰动,在此工况下对系统的控制要求是使水轮机组输出频率能很好地跟踪频率给定值。本文基于Simulink仿真软件研究水轮机调节系统在频率扰动下的动态过渡过程,在系统频率给定值发生变化(在仿真实验中用频率阶跃扰动信号表示)时对系统动态性能进行分析。
Simulink是Matlab中一个重要的、十分直观、快捷的动态仿真工具箱[5-9]。笔者首先建立水轮机调节系统数学模型,然后在机组空载频率扰动工况下,在Simulink平台下搭建频率扰动仿真模块,进行调速器PID参数及被控参数不同取值的频率扰动仿真实验。
1 水轮机调节系统数学模型
PID调节[10-12]因其规律简单、控制效果良好,在水轮机调节系统中被广泛采用,其传递函数为
(1)
式中,s为拉普拉斯算子,Kp为比例增益、Ki为积分增益、Kd为微分增益、Tn为加速度时间常数。
微机调速器电液随动系统部分的传递函数表示为[2]
(2)
式中,Ty为接力器响应时间常数(s),当系统处于小波动状态下,水体和管壁均呈刚性[2]。引水系统部分的特性可表示如下:
(3)
式中,q为水流流量,Tw为引水系统水流惯性时间常数(s)。
水轮机转矩Mt和流量Qt常用机组转速n、导叶开度y以及水头H来表示[2],则为:
Δmt=exΔx+eyΔy+ehΔh
Δqt=eqxΔx+eqyΔy+eqhΔh
(4)
式中,ex,ey,eh,eqx,eqy,eqh分别表示水轮机传递系数。
系统处于小波动工况下,水轮发电机机组运行时的动态特性可表示为[2]:
(5)
式中,Ta为机组惯性时间常数(s),en为被控系统自调节系数。
根据上述一系列公式,可得到典型水轮机调节系统数学模型框图如图1所示。

图1 典型水轮机调节系统数学模型
2 水轮机调节系统仿真模型
根据上述推导及建立的水轮机调节系统数学模型,在Matlab/Simulink平台下搭建了水轮机调节系统仿真模块(见图2(a))。图中,K1为给定频率的阶跃信号给定/切断开关;K2为机组反馈信号投入/切断开关;K3为负荷扰动信号加入/切断开关。当这些开关处于不同的位置和组合时,可以形成水轮机调节系统不同工况的仿真模型。
当系统处于负荷扰动工况时,K1接入0端,K2接入系统形成反馈,K3接到负荷阶跃信号端,此时的控制要求是:使系统能尽快消除负荷扰动等对机组频率带来的影响;而当系统在本文所研究的频率扰动工况下时,开关K1接到阶跃信号输入端,K2接入系统形成反馈,K3连接到0端,而此时的控制要求则为保证水轮机组频率能很好地跟踪频率给定值。
3 仿真实验
图2(a)所示是一个典型的水轮机调节系统[13]。为了验证在Matlab/Simulink下PID控制系统参数及被控系统参数对整个水轮机调节系统频率扰动性能的影响,在空载频率扰动工况下,对系统施加频率阶跃扰动进行仿真,观察当PID控制系统参数及被控系统参数数值改变时系统性能的变化情况。
在空载5%频率扰动工况下,设仿真时间为20 s,其中case 1和case 8中的PID参数分别来自文献[14]中的改进混沌粒子群算法(CIPSO)和典型粒子群算法(PSO)整定后的结果,而case 9的PID参数则来自于Ziegler-Nichols(ZN)整定方法(见表1)。表1中的所有案例,Ta=5.72 s,Tw=0.83 s,en=0.45,ey=1.40,eh=0.35,eqh=0.13,eqy=1.23,其中,fmax为调节过程中频率相对偏差最大值,tf为频率相对偏差稳定时间,ts为接力器开度稳定时间。表2中所列的所有案例,其PID参数均采用case 1中的数值。

图2 Matlab/Simulink仿真模块

表1 改变PID参数的系统仿真结果
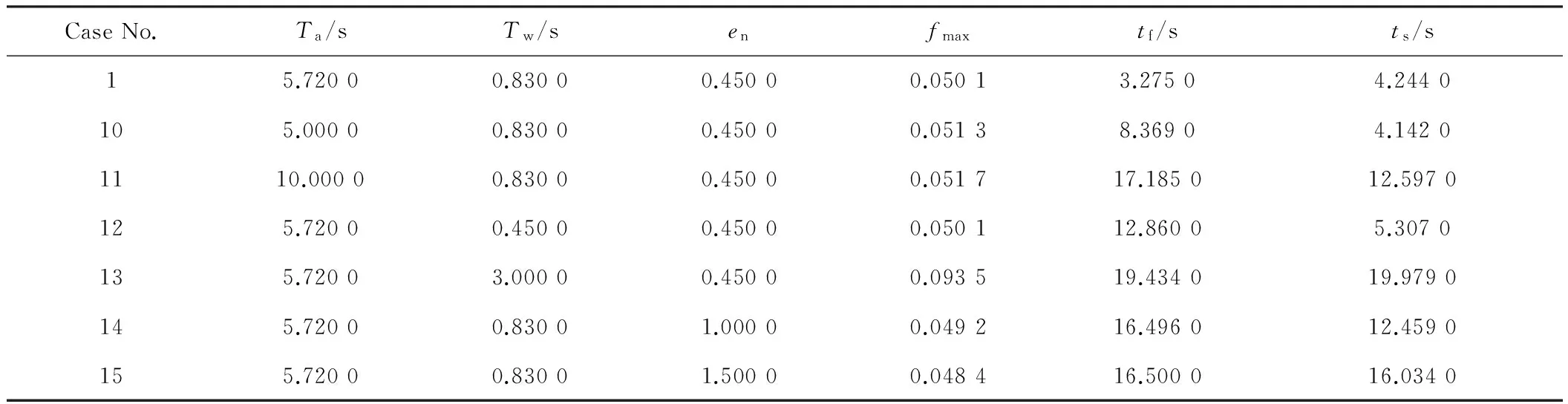
表2 改变被控系统参数的系统仿真结果
如图3所示,在case 1参数控制作用下,系统动态性能优良,其比例作用的强度比较适中,接力器开启后向稳定值过渡迅速;case 2中Kp值最小,在仿真过程中,频率上升比较缓慢,达到的最大频率相对偏差fmax为0.052 5,在扰动后向稳定值恢复的速度非常缓慢,接力器开启的幅度最小,调节的稳定时间较长;case 3中Kp值最大,频率的上升速度较快,但超调量较大,接力器开启的动作幅度最大,扰动后能迅速向稳定值恢复,但是出现了振荡现象。

图3 Kp对机组空载频率扰动特性的影响
由图4可得,当Ki值较小时(case 4),在扰动后频率的上升速度较为缓慢,向稳定值恢复的速度也较慢,接力器开启的幅度较小;当Ki值比较大时(case 5),在受到扰动后,机组频率迅速上升,但是出现了较大的超调,接力器开启的幅度最大,且出现了振荡现象,调节的稳定时间较长。

图4 Ki对机组空载频率扰动特性的影响
由图5看出,当Kd取较小值时(case 6),机组频率变化速率较小,频率相对偏差的最大值fmax为0.057 6,向稳定值恢复的速度较快,此时接力器开度较小,向稳定值恢复的速度较慢;当Kd取较大值时(case 7),在扰动后,机组频率的上升速度较快,但超调量较大,此时接力器开度较大,但振荡现象严重,且调节的稳定时间长,ts=10.381 0 s。

图5 Kd对机组空载频率扰动特性的影响
在图6中,case 1、case 8和case 9中的PID参数是分别经改进混沌粒子群算法(CIPSO)、典型粒子群算法(PSO)[14]和ZN算法整定后所得。图6中3种算法相比较,在CIPSO整定后的PID参数调节下,系统性能最好;而控制效果最差的是经ZN算法整定后的结果。仿真结果表明,PID参数作为一个统一整体,其合理配合相当重要。要想得到效果优良的系统动态性能,参数的寻优十分有必要。

图6 PID参数对机组空载频率扰动特性的影响
图7所示为改变Ta取值时机组动态特性变化情况。在Ta较小的情况下(case 10)的过渡过程中,频率上升较快,接力器开度达到最大值后向稳定值恢复的速度很快,ts=4.142 0 s。在Ta较大的情况下(case 11),受到扰动后,频率上升缓慢,过渡过程中出现了小量超调的动态过程。扰动后,接力器开度恢复速度极为缓慢,ts=12.597 0 s。在3组数据下,接力器开启幅度几乎相同,说明机组惯性时间常数Ta的取值对频率扰动特性的影响较小。
由图8可以看出Tw的取值对系统动态性能影响较大。随着Tw的增大,系统动态性能逐渐变差,当Tw过大时,振荡现象严重,频率相对偏差超调量较大。
由图9可得,对于不同的en取值,接力器行程静态稳定值不同。当en=0.450 0(case 1)时,扰动后接力器开度的稳定值为0.016 1;当en=1.000 0(case 14)时,扰动后接力器开度的稳定值为0.035 4;当en=1.500 0(case 14)时,接力器行程的稳定值为0.052 4。

图7 Ta对机组空载频率扰动特性的影响

图8 Tw对机组空载频率扰动特性的影响

图9 en对机组空载频率扰动特性的影响
4 结束语
在机组空载频率扰动工况下进行多次仿真实验,实验结果表明,在Simulink下建立的频率扰动仿真系统能直观地显示参数变化对系统性能带来的影响,以此得到使系统在频率扰动工况下拥有良好动态性能的参数组合。在系统诸多参数中,调速器PID参数对系统频率扰动动态性能影响很大,参数数值决定了系统频率扰动动态过程的调节时间、静态误差、超调量等性能指标。
笔者将水轮机调节系统的Simulink频率扰动仿真实验引入教学,既加深了学生对典型水轮机组频率扰动和PID调节的认识与理解,强化学生对调速器PID参数和被控系统参数对调节系统频率扰动性能影响的分析与理解,还可以增强学生运用Simulink仿真工具进行水轮机调节系统频率扰动仿真实验的能力。
(
)
[1] 郑源,于洋,陈创新,等.水轮机教学试验台的研制[J].实验技术与管理,2005,22(2):52-56.
[2] Chen Gonggui, Liu Lilan, Song Peizhu, et al. Chaotic improved PSO-based multi-objective optimization for minimization of power losses and L index in power systems[J].Energy Conversion and Management,2014,86:548-560.
[3] 魏守平.水轮机调节系统仿真[M].武汉:华中科技大学出版社,2011:1-142.
[4] 殷桂梁,张圣明.微型水力发电机组系统建模与仿真[J].电网技术,2012,36(2):147-152.
[5] 王钊,陈真.基于Simulink的PID控制器设计[J].实验技术与管理,2007,24(5):70-72.
[6] 谢华博,张俊民.基于Matlab/Simulink的电力变换电力仿真[J].电气电子教学学报,2007,29(4):72-74.
[7] 高仕红.基于MATLAB的异步电动机工作特性的研究[J].电气电子教学学报,2010,32(4):40-42.
[8] 陈梅莲,于建均,刘琦.基于Matlab实时控制的磁浮球系统的实验研究[J].实验技术与管理,2012,29(5):118-123.
[9] 董圣英.MATLAB在二阶电路动态分析中的应用[J].电气电子教学学报,2010,32(5):116-118.
[10] 俞海珍,史旭华,徐建瑜.模糊自适应PID控制在过程控制实验系统上的应用[J].实验技术与管理,2010,27(1):69-72.
[11] 孙大卫,张国良,陈励华.基于根轨迹的直流伺服电动机PID控制器参数确定法[J].实验技术与管理,2009,26(4):38-41,109.
[12] 余朝刚,刘启中,齐东平,等.基于SIMIT SEC的水位PID控制实验[J].实验室研究与探索,2008,27(8):216-218.
[13] 魏星,张青松,黄辉.基于改进粒子群算法的水轮机调速器参数优化[J].电力科学与工程,2005(3):48-51.
[14] Chen Gonggui, Du Yangwei, Song Peizhu. Parameter optimization of hydro turbine governor PID controller by chaotic improved PSO algorithm[J].Energy Education and Technology Part A: Energy Science and Research, 2014, 32(5):3949-3962.
Research on frequency disturbance simulation for turbine governing system based on Simulink
Chen Gonggui1, Du Yangwei1, Guo Yanyan2, Tang Xianlun1
(1. Research Center on Complex Power System Analysis and Control, Chongqing University of Posts and Telecommunications, Chongqing 400065, China;2.Department of Locomotive and Vehicle Engineering, Wuhan Railway Vocational College of Technology, Wuhan 430205, China)
The computer simulation technology is used to study the frequency disturbance of water turbine governing system (WTRS). Under no-load frequency disturbance condition, the parameters of governor and the controlled system are changed to do the simulation experiments. The simulation results show that the different parameters combinations have great influences on the system’s performances under frequency disturbance condition. In addition, the simulation experiments in Simulink environment can seek to find the parameter combination which can make the governing system achieve good control effect under frequency disturbance condition. The simulation experiments can not only strengthen students’ understanding of the PID adjusting rule for frequency disturbance of hydroelectric generating set, but also improve the students’ ability of using the computer technology to provide theoretical basis and evaluation for the practical engineering problem of WTRS under frequency disturbance condition.
water turbine; governing system; Simulink; no-load frequency disturbance; simulation experiment
2015- 04- 08
重庆邮电大学教育教学改革项目(XJG1416);重庆市高等教育教学改革研究重点项目(132016)
陈功贵(1964—),男,湖北恩施,博士,教授,主要从事电气工程专业的教学和科研工作.
E-mail:chenggpower@126.com
TM612; G434
A
1002-4956(2015)11- 0113- 05
