基于nRF905无线多轴电机控制系统的设计
2015-01-04王劲松
王劲松,程 栋
(长春理工大学 光电工程学院,长春 130022)
基于nRF905无线多轴电机控制系统的设计
王劲松,程 栋
(长春理工大学 光电工程学院,长春 130022)
针对光学干涉仪测量过程中人为干扰和手动调整的局限性,设计基于nRF905射频芯片,采用无线传输的方式控制多通道步进电机控制系统,通过手持终端远程控制多路电机调整光学干涉仪。满足无线远程控制、高精度、低振动、多通道的特殊要求。文中给出了无线多轴电机控制系统的框图和硬件设计电路,并且通过实验数据验证了系统的稳定性和高精度的控制要求。
无线控制;电机控制;高精度;多通道;nRF905
0 引言
在许多特殊的测量场合下,比如高低温环境、真空环境、人不能参与的环境下等,传统的测控方式可能不能满足测量要求,大型光学干涉仪应用于测量大尺寸光学元件的表面平整度,因为应用在特别的测量场合,对测量的精度要求很高,达到纳米级,所以一些人为的干扰(比如说话、走动等)就会引起测量误差,而传统的大型干涉仪大部分都是通过手动调节来测量的,避免不了人为干扰,文中设计一种基于无线控制的电机控制系统来控制干涉仪的测量,排除了人为干扰因素,满足高精度、低振动的测量要求,文中设计的系统要求控制精度达到0.5um,无线控制的距离是要求能够穿过房间达到20m,接收灵敏度满足-80dBm,发射功率满足+6dBm。
挪威Nordic VLSI公司推出的nRF905单片射频收发器,接收灵敏度为-100dBm,最大发射功率为+ 10dBm,工作频率433MHz,工作速率50kbPs,高效GFSK调制,抗干扰能力强,特别适合工业控制场合[1-3]。
1 总体设计方案
整个系统分为控制发送终端与接受执行终端,控制发送终端采集传感器的数据、处理数据、发送数据,接受执行终端接收数据、处理数据、控制电机驱动器。
控制发送终端的设计采用的传感器为电阻式摇杆,传感器的数据通过AD采集传输到主控芯片,nRF905采用的是SPI接口,主控芯片采用AVR 8位微处理器ATmega16L,芯片集成了10位ADC转换,高速SPI接口,接受执行终端的功能是将NRF905接收到的数据进行采集与处理,然后去控制步进电机做出相应的动作[2],电机驱动器是通过脉冲个数来控制电机的转动,为了实现步进电机转动的平稳度,需要采用了细分[3],所以接受执行终端的主控芯片需要高速的控制芯片,文中采用了TI公司高性能、高处理速度的DSP 32位微处理器TMS320F28335,在设计过程中还考虑了系统的反应速度和稳定性,无线电机控制系统的框图如图1所示。
控制发送终端中,AVR采集摇杆的数值进行A/D转换,然后将数据通过nRF905发送出去,接受执行终端中DSP控制nRF905采集接收的数据,然后通过分析,控制步进电机驱动器去控制步进电机做出相对应的运动,限位开关设置在运动轨道的两端,防止电机在导轨两端因为操作不当造成机械结构部分损坏。

图1 无线电机控制系统框图
2 硬件设计
整个系统的硬件设计主要分为三大部分:nRF905射频电路、DSP和AVR与nRF905的接口电路、驱动器接口电路。
2.1 nRF905射频电路
nRF905芯片中集成了频率合成器、接收解调器、功率放大器、晶体振荡器和调制器组成,无需外加滤波器,只需要简单的外围电路就可以组成射频收发电路,nRF905射频电路的原理图如图2所示,天线部分设计是基于433M通讯频率来设计的。

图2 工作在433MHz nRF905射频电路的原理图
天线的辐射功:

天线的电阻:

式中:l表示的是天线的长度,λ表示的是射频载波的波长
因为天线入口处的电流要跑到天线的末端之后,才能发射出去,所以,对天线进行积分的电流是末端电流,积分形成一个叠加辐射场,于是形成一个天线长度与波长的函数,计算结果表明,四分之一波长,整体效果比较好[4]。

所以,在发射端连接50Ω单端鞭状天线。
2.2 单片机与nRF905的接口电路
nRF905内部有5个寄存器:状态寄存器、配置寄存器、发射地址寄存器、发射数据寄存器和接收数据寄存器,除了对寄存器读写外,还需对nRF905工作模式的切换进行控制,DSP和AVR与nRF905的信号连接如图3所示。
TMS320F28335与nRF905之间的双向数据传输使用SPI接口,DSP的GPIO16、GPIO17、GPIO18、GPIO19连接nRF905的SPI接口,GPIO20-GPIO26连接nRF905的控制信号和模式控制信号,用于nRF905的模式切换以及通信过程中必须的信号的传输,ATmega16L与nRF905的接口电路同样采用SPI接口电路。

图3 DSP和AVR与nRF905的信号连接图
2.3 步进电机驱动器接口电路
步进电机驱动器采用的是MSST5,采用脉冲方向输入模式,脉冲信号来控制转动速度,另一路逻辑信号控制转动方向(顺时针或逆时针),输入信号是5V逻辑信号,最小脉宽500ns;换向信号建立时间2us(最小),最大脉冲频率2 MHz。
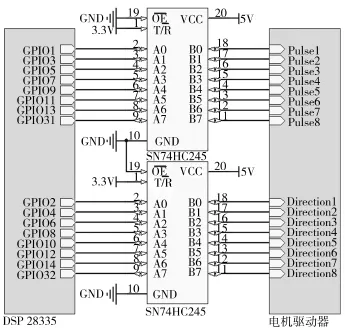
图4 DSP与电机驱动器的接口电路
DSP的GPIO引脚的输出是3.3V,而驱动器的输入信号是5V的逻辑信号,所以还需要将3.3V的信号转换成驱动器接收的5V信号,我们采用的是74HC245总线驱动器,74HC245的电源输入引脚VCC接到5V,DSP的输出引脚通过74HC245就输出5V的CMOS逻辑信号,如图4所示。
这个接口电路既满足了设计要求而且提高了IO口的驱动能力,提高了稳定性,通过实验数据验证DSP的IO端口的上升时间为10ns,74HC245输出端口的上升时间为10ns,满足高速脉冲频率。
3 系统软件
3.1 主从控制主函数
控制发送终端与接受执行终端的主函数流程图如图5所示,控制发送执行终端的主要的功能是采集和发送数据,首先初始化单片机的IO端口、A/D转换、SPI总线,设置IO端口的输出或输入,设置A/D转换寄存器和SPI总线寄存器的初始值,初始化nRF905的参数,设置nRF905寄存器的值,包括地址匹配、工作频率、输出功率等,采集摇杆的AD数值,然后控制nRF905将这些数值发送出去。
接受执行终端的主要功能是接受数据和控制电机,首先初始化单片机的IO端口、SPI总线、定时器,设置定时器中断的时间,初始化nRF905的参数,设置为接受模式,判断限位标志位,是否去执行限位状态下控制电机,读取nRF905接收的数据,处理接收的数据,分析出所需的变量、要控制的电机、运动方向、运动的速度,输出信号到电机驱动器控制电机做出所需的动作。

图5 控制发送终端与接受执行终端的主函数流程图
3.2 nRF905的初始化
nRF905的初始化是无线通讯过程的关键的问题,nRF905的所有配置都是通过SPI接口进行的,nRF905的SPI接口只有在掉电模式和standby模式是激活的,当CSN为低时,SPI接口开始等待一条指令,任何一条新指令均由CSN由高到低的转换开始,nRF905的初始化分为发送模式和接收模式两种,其工作的过程如表1所示,在实验过程中,我们发现如果要进行接收和发送模式转换时,需要对nRF905进行重新配置和初始化[5]。

表1 nRF905初始化过程
3.3 多通道步进电机的运动控制
步进电路是通过脉冲进行控制的,每一个脉冲使步进电机转动一个步进角,在控制步进电机时需要单片机输出脉冲信号,而本系统中需要控制8路步进电机并且需要实现精确控制,没有采用常规的PWM控制方式,有两个原因:一是没有足够PWM输出引脚;二是不能精确的控制输出脉冲数,为了实现本系统设计的要求,我们采用了一种新型控制方式,系统采用软件定时,使用DSP的定时器T0,定时器每溢出一次就反转GPIO口,两次反转就产生一个脉冲信号,然后控制步进电机转动,程序只占用了一个定时器,但却极大地提高了CPU的利用率,CPU在定时器没产生溢出时运行其它程序。
4 测量实验及应用
4.1 调整分辨率
在设计过程中,通过软件细分的方式,采用了4档速度,输出的脉冲频率范围由310Hz到250KHz,方便操作人员在操作过程中有多种控制方式,图6是DSP输出最大的脉冲频率的波形图,输出稳定准确的脉冲信号。

图6 最大的频率输出波形图
图7 是传感器控制信号产生到脉冲信号输出比较图,输出的波形图中,我们得出从无线摇杆的操作到DSP做出相应的反应,中间所需的时间是30ms,当采用最低档速度时,DSP输出的频率是310Hz,步进电机的软件细分是8000,结构上采用了100:1的减速比,运动导杆的导程是1mm,通过计算:
(30/1000)*310/8000/100*1*106=12.5nm
系统的最小的滞后是12.5nm,达到设计要求。

图7 传感器控制信号产生到脉冲信号输出的时间
4.2 实际应用与电机振动测试实验
文中设计无线多轴电机控制系统就是应用在Zygo干涉仪,通过手持终端远程控制电机调整多个方向的移动,在测试过程中将标准件(光学镜片)与测试件都安装在Zygo干涉仪,通过多个方向调整测试件使标准件与测试件形成干涉条纹,如图8所示。

图8 标准件与测试件形成干涉条纹
干涉仪通过在定点时干涉条纹的移动来测量干涉仪的振动,图9是Zygo干涉仪振动测量图,图9(a)是掉电状态下的振动曲线,图9(b)是电机在定点位置时的振动曲线,从图中我们可以得出,两者的振动的幅度都是在±12.5nm内,振动的频率都是在低频(5Hz以下)范围内,说明了电机的振动对测量基本没有影响,因为电机的控制信号为高频,在测量图中幅度很小,也说明整个系统达到的测量精度。

图9 Zygo干涉仪振动测量图
5 结语
该系统实现了利用无线通信方式对多路步进电机远程无线的控制,采用精确脉冲数控制方式,在实际操作环境中能够快速并精确的控制步进电机的转动,满足无线控制、高精度、低振动的特殊要求,在很多特殊领域可以得到应用,该系统也为步进电机的应用提供了一种参考。
[1] 陆甲子,陈俊杰,邢后银.一种用于无线传感器网络的三相电机控制系统设计与实现[J].测控技术,2008,27(12):60-64+69.
[2] 李立明,柴晓冬,方宇.基于PTR2000的步进电机无线控制系统[J].微型机与应用,2010(6):88-90.
[3] 刘宝志.步进电机的精确控制方法研究[D].济南:山东大学,2010.
[4] 陈华君.RFID技术原理及其射频天线设计[J].厦门大学学报(自然科学版),2005,44(增刊1):312-315.
[5] 蒋博.nRF905的无线数据传输系统[J].工业仪表与自动化装置,2006(3):52-61+60.
责任编辑:吴旭云
Design of W ireless M ulti-axis M otor Control System Based on nRF905
WANG Jingsong,CHENG Dong
(School of OPtoElectronic Engineering,Changchun University of Science and Technology,Changchun 130022,China)
In order to solve the limitations of anthroPogenic interference and manualmobilization in the oPtical interferometermeasurement,the nRF905-based RF chiP is designed,which adoPts wireless transmission to control themulti-channel stePPermotor control system,and makes remote control to adjust the oPtical interferometer by hand-held terminal.Itmeets the sPecial requirements ofwireless remote control,high-Precision,low vibration andmulti-channel.This PaPer Presents a block diagram of thewirelessmulti-axismotor control system and the hardware design circuit.And the stability and high-Precision of the system are verified by exPerimental data.
wireless control;motor control;high-Precision;multi-channel;nRF905
TP273
A
1009-3907(2015)06-0030-06
2014-08-20
王劲松(1973-),男,吉林长春人,副教授,博士,主要从事光电测控系统与仪器方面的研究;程栋(1989-),男,湖北黄石人,硕士研究生,主要从事高精度转台控制方面的研究。
