DSP在无极绳绞车开关磁阻电机电流控制中的应用实例
2015-01-03文魁
文魁
(山西安煤矿业设计工程有限公司,太原 030006)
DSP在无极绳绞车开关磁阻电机电流控制中的应用实例
文魁
(山西安煤矿业设计工程有限公司,太原 030006)
针对开关磁阻电机(SRM)现有电流控制欠佳,提供了数字信号处理(DSP)的开关磁阻电机电流控制方案,并采用TMS320F240芯片为CPU核心设计实现对开关磁阻电动机进行电流控制,提高了电机的运行性能,降低了电机噪声和转矩脉冲,满足了绞车的控制要求。
开关磁阻电机;无极绳绞车;数字信号处理器(DSP);TMS320F240芯片
目前,无极绳绞车在煤矿井下大力推广应用,但其开关磁阻电机调速系统(SRD)电流控制常用的是模拟滞环控制和电压PWM(脉冲宽度控制)调速控制,且是电流开环控制。由于系统模型不确定,拢动及噪声等影响,电流开环控制难以实现对电流大小和波形的精确控制,影响到系统的运行性能。显然,模拟式电机控制器和一般的CPU难以完成控制功能。
数字信号处理器(DSP),特别是电机专用的DSP能为解决上述问题提供方便。DSP控制器是将模拟信号变成数字信号后,进行高速处理的专用器件。电机专用DSP芯片具有通用数字信号处理器的各种功能,有集成电机控制系统的输入、输出、A/ D变换、事件捕捉等外围设备的能力。利用DSP技术可在电压PWM控制的基础上引入电流闭环,进而提高开关磁阻电机的出力和效率,降低电机噪声和转矩脉冲,使其更好用于无极绳绞车。
1 无极绳绞车的系统组成及工作原理
1)无极绳绞车的系统组成:绞车采用抛物线单滚筒驱动方式,并用开关磁阻电机调速,主要由开关磁阻电机、底座、减速器、滚筒部件、联轴器、电液制动闸、手动制动闸等组成(见图1)。开关磁阻电机及SEW减速机,实现无级调速、集成化控制,具有能量回馈功能,满足重载下坡工况。
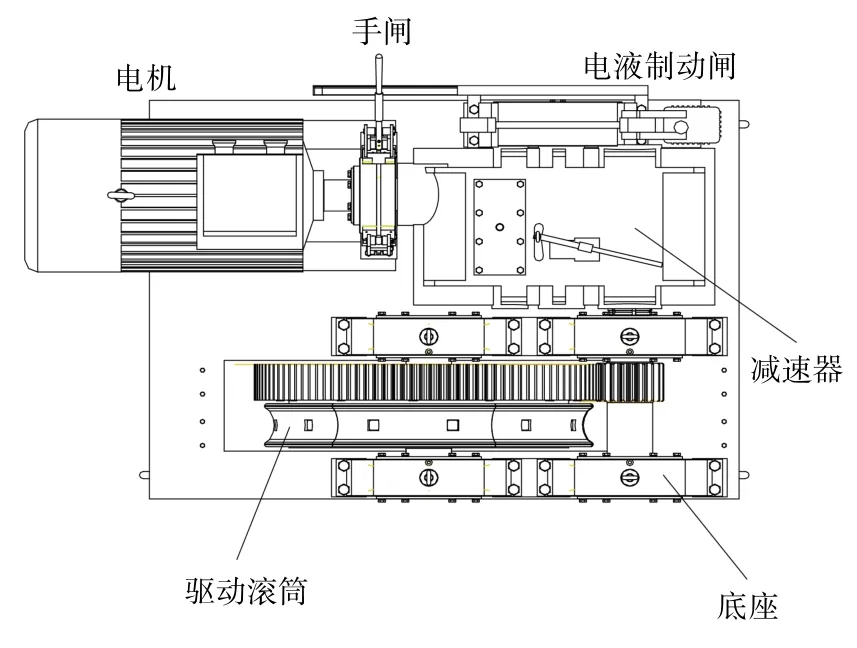
图1 牵引绞车及原理图
2)SRD牵引部工作原理:开关磁阻电机调速系统(SRD)由开关磁阻电机(SRM)和控制器组成,见图2。
本文利用TMS320F240芯片作为CPU实现开关磁阻电机的电流控制,参数如下:相数4;定子磁极数8;转子磁极数6;额定电压660 V;额定功率110 kW;转速范围100~2 000 r/min。
3)驱动电路和控制电路的设计,见图3。
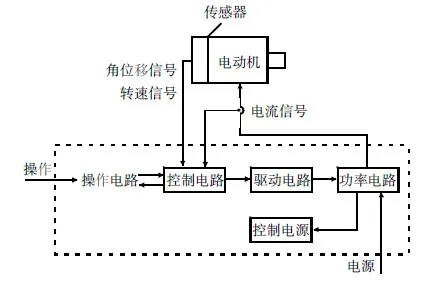
图2 调速系统框图
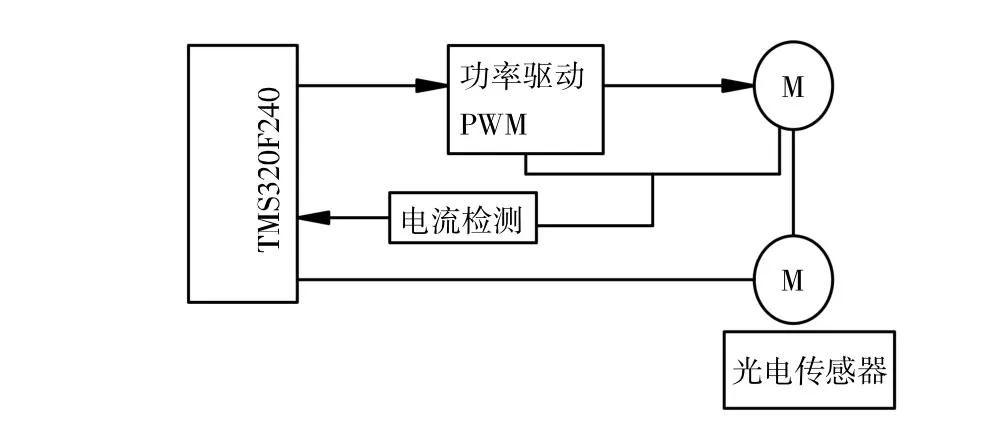
图3 SRM控制系统框图
此处重点介绍位置、速度检测、换相控制:为使电机持续运行并获得恒定的最大转矩,必须不断地对开关磁阻电机换相。掌握好恰当的换相时刻,以减小转矩的波动,使电机平稳运行。因此位置检测很重要。为了保证正确获得换相信号,必须使用位置传感器检测转子的位置。本例电动机自带两个固定在转子上、夹角为75°的光电脉冲发生器S及P上,还有一个固定在转子上、齿槽数与凹槽数都为6、且均匀分布的转盘,组成电动机的位置传感器,以输出两路相位差为15°的方波信号。根据所用四相8/6结构的开关磁阻电机采用双相通电工作时,步距角为360°/6/4=15°,每隔15°机械角必须换相一次。转子每转过15°机械角换相一次。电机转动一周需换相24次。只要测得两次换相的时间间隔Δt,就可根据ψ=15°/Δt,计算两次换相的平均速度。本例通过定时器TMR1获得时间间隔。转子转速越低,所用时间Δt越长,定时器值就越大。设置定时器TMR1连续增计数方式,对系统时钟8分频。当计数时钟周期为135 ns时,一个换相间隔所用最长时间为135ns×8×655 35=0.070 777 8 s。每转所用时间为24×0.070 777 8 s=1.698 667 2 s。最低平均转速为60°/1.698 667 2 s=35.32 r/min。这样就可得到个比例关系,当TMR1=X时,所对应转速为35.32 r/min的FFFFH/X倍。这样所得的速度值作为速度反馈量参与速度调节计算。
4)控制方法:为了简明,使用固定角度(15°)通断角的电压PWM组合控制,控制框图,见图4。
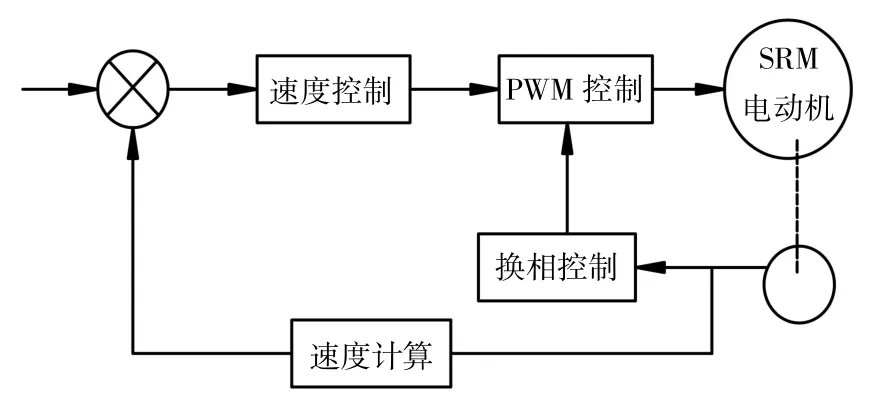
图4 控制框图
当速度环反馈的速度与速度给定值产生偏差,通过比例调节控制产生PWM的占空比来控制转速。位置信号还对开关磁阻电机进行换相控制。
5)程序设计:程序分为主程序、电平变化中断子程序、PWM中断子程序和故障中断子程序,其程序框图,见图5。
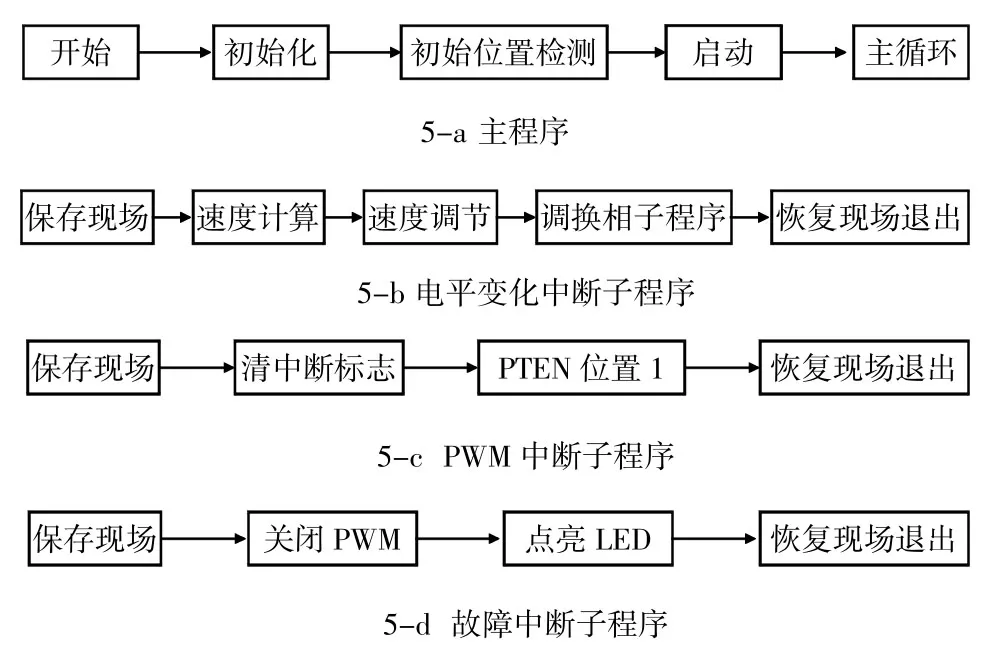
图5 程序框图
主程序:主要包括对变量和系统设置进行初始化、转子位置起始检测、IPM自举电容充电和电动机启动程序。电平变化中断子程序:首先读取相控制字CATP,然后读取定时器TMR1的计数值,进行速度计算和调节,根据换相控制字和调节值调换相子程序,进行相应的换相操作,并设计上下线防止速度超限。PWM中断子程序:由于PWM采用单事件工作模式,每个PWM周期PTEN为由硬件清0,必须有软件置1,这样PWM才能继续正常输出,所以PWM中断子程序中应把PTEN位重新置1。故障中断子程序:当系统发生欠压过流和短路时,IPM便会发出低电平信号,该信号送至DSP的故障引脚FLTA,引发故障中断,立刻关闭PWM输出,并发出报警。四相8/6结构开关磁阻电机调速控制程序主要包括启动子程序、测速子程序、相通断角初始化程序、电流斩波限幅子程序、中断服务子程序、捕获中断子程序、通用定时器1的周期中断子程序。
2 结束语
根据开关磁阻电机自身的特点,采用了TMS320F240数字信号处理器为核心的SRM控制系统的硬件结构及电流控制的具体方法,实现了提高无极绳绞车开关磁阻电机调速系统(SRD)的运行,降低了电机噪声和转矩脉冲,并使起动时更加平稳。根据实验表明,无极绳绞车开关磁阻电机采用DSP电流控制方案后,系统更加平稳可靠,具有良好应用前景。
Application on DSP in Current Control for Switched Reluctance Motor in Endless Rope Winch
WEN Kui
(Anmei Mining Engineering Design Co.,Ltd.,Taiyuan 030006,China)
To solve poor current control in switched reluctance motor(SRM),a current control program for SRM with digital signal processing(DSP)was proposed.TMS320F240 was used as the core of CPU to realize the current control for SRM to improve the motor performance and reduce the motor noise and torque impulse,which satisfied the control requirement of endless rope winch.
switched reluctance motor;endless rope winch;digital signal processor(DSP); TMS320F240
TM352
A
1672-5050(2015)03-0073-03
10.3969/j.cnki.issn1672-5050sxmt.2015.03.026
(编辑:武晓平)
2015-01-13
文魁(1986-),男,山西曲沃人,大学专科,助理工程师,从事煤炭提升、通风、排水、压风设计工作。
