脉冲雷达幅相一致性快速标定方法研究
2015-01-03
(大连91550部队92分队,116023)
脉冲雷达幅相一致性快速标定方法研究
卢长海
(大连91550部队92分队,116023)
脉冲雷达对幅相一致性要求较高,在任务前需要对雷达幅相一致性进行标定。本文介绍了幅相特性不平衡的影响,给出了幅相不平衡标定原理及方法。由于相位一致性标定均需要标校塔和信号源的支持,分析了常用的无塔校相方法,提出了在无塔条件下利用模拟器进行幅相一致性的快速标定。
单脉冲;幅相一致性;模拟器
0 引言
单脉冲雷达因其测角精度高,适用于反射式工作方式,因而得到广泛的应用。但是,单脉冲雷达要求在动态范围内幅相特性要一致,和差通道幅相特性的不一致性对测角精度会产生影响,严重时甚至会无法实现角度跟踪,导致目标丢失。我们通常所讲的幅相特性一致性,主要是对接收机的和、差通道而言的,一般要求幅度差不大于±1.5dB,相位差不大于±15°,因此任务前需要对脉冲雷达进行幅相一致性标定,以减小和改善幅相特性的不一致。
1 幅相特性不平衡的影响
1.1 对测角的影响
振幅和差式单脉冲系统中,若和差通道存在幅度不平衡,将引起电轴漂移,影响测角灵敏度和测角精度。比较器前出现相移,将会使零值“抬高”,减小零值深度,使相位检波器中电轴的相位阶跃反转变成缓慢反转,使得测角特性曲线斜率变小,降低了单脉冲雷达系统测角灵敏度,但对测角精度没有影响。
1.2 对改善因子的影响
理想情况下,相干接收机中的I、Q两路相干检波器在相位上严格相差900正交,在幅度上它们是相等的,但在实际接收机中,由于各种原因是难以达到的,因此在幅度和相位上会有误差,分别以ΔA,Δθ表示。两路正交信号表示为

式中:EI,EQ为两路正交输出直流分量;A为理想情况下的信号幅度;θ为信号的初始相位;fd为多普勒频率;ΔA为幅度不一致百分比;Δθ为相位不一致因子。I、Q幅相不一致对改善因子IdB的限制,如图1所示。由于在技术上控制相干检波器的相位误差比控制其幅度误差更困难,因此对改善因子限制在-30dB时,Δθ=3%,ΔA≤3%。
2 幅度相位补偿原理

图1 幅相不一致对改善因子影响
在振幅和差式单脉冲体制中,和差比较器Δ端输出的高频角误差信号还不能控制天线跟踪目标,必须变换成直流误差电压,其大小与高频角误差的振幅成比例,极性应由高频角误差的相位决定,和信号为基准信号,输出误差电压为:

式中:AΔ位差信号幅度,AΣ为和信号幅度,φ为和差信号之间的相位差。
当φ=0时为正极性,φ=π时为负极性,电压幅度与目标误差角ε成比例,正负极性反应了目标偏离天线轴线的方向,相位检波器输出视频脉冲幅度u与目标误差角ε关系曲线,称为角鉴别特性(S曲线)。幅相一致性标定就是要把这个相位差控制到0°或180° 。
文献[3]中利用脉冲雷达和通道、方位差通道、俯仰差通道I、Q数据,数据处理计算机根据计算出系统幅相一致性的相位补偿量和幅度补偿量,计算结果送信号处理系统,根据补偿量对和通道、方位差通道、俯仰差进行修正补偿,如图2所示。

图2 通道幅相一致性补偿
I:和支路I通道数值
Q:和支路Q通道数值
IA:方位支路I通道数值
QA:方位支路Q通道数值
IE:俯仰支路I通道数值
QE:俯仰支路Q通道数值

即:方位差通道幅度相对于和通道的补偿量为复数S/SA的实部,其相位补偿量为复数S/SA的虚部。俯仰差通道补偿原理同方位差通道,只需将方位、俯仰差两通道信号复乘各自对应的补偿量,即可完成系统幅相一致性标定。
该方法幅相一致性标定需要借助塔信源,让方位、俯仰通道利用雷达命令位置功能分别偏置1mil(密位)来统计幅度和相位的补偿量,最后将左右、上下多次测试结果取平均值,最终取得方位、俯仰通道的补偿值。
针对幅度的标定,统计噪声发也是常用的标定方法,操作步骤原理如下:
三路幅度一致性测试补偿量的计算如下:
将AGC/MGC置为0dB,将距离波门置于远区噪声处,通过统计和∑、方位ΔA、俯仰ΔE三路噪声信号I、Q值,计算三路幅度补偿值(dΣ,dΔA,dΔE)


相位一致性的标定,需要偏开塔信源一定角度,通过统计方位、俯仰与和路间的相位差,计算方位相位补偿值Ac与俯仰相位补偿值Ec,可通过多次计算确认相位补偿值的准确性。

以上方法均能实现幅相一致性的标定,在实际应用中均得到满意的结果,两种标定原理都需要塔信源的支持,第二种方法幅度一致性标定可以单独完成,但相位一致性标定需要标校塔和信号源的支持。对于雷达应急保障来讲,建塔及维护成本较高,有些测量站点选址困难,因此无塔校相的研究是雷达应急标定的研究方向。在文献[4]中提出了释放标定球利用微光电视加偏跟踪的方法;文献[5]中分析校相过程引入误差的原理,再利用合适的滤波方法,将不稳定因素滤除,进而得到不稳定条件下的稳定正确相位;文献[6]中提出了利用射电星校相得解决思路。对于我们雷达来讲,由于天线口径小,射电星信号微弱,所以不适用。释放标定球的确能解决无塔校相的问题,但操作过程费时费力,也不满足快速标定的目的;文献[5]中也需要校相信号源的支持,对于配备目标模拟器的雷达来说也不是备选方案,因此利用目标模拟器实现快速标定是最佳选择。
3 利用模拟器进行快速标定
单脉冲雷达有激励源工作模式和模拟器工作模式,在模拟器工作模式下可以完成距离搜索、跟踪、信号幅度提取,用于调整雷达状态和跟踪捕获训练。模拟器提供射频模拟信号直接在天线及馈线单元后端定向耦合器输入,如图3所示。采用模拟器模拟电轴置偏量可以完成接收通道幅相一致性参数标定,标定原理如公式(6)。由于天线与馈线单位是无源器件,长时间使用幅相参数变化微小,因此通过完整通道的幅相补偿参数和模拟器标定的幅相补偿参数可以确定出天线及馈线单元的幅相补偿参数,将天线馈线的幅相补偿参数作为一个固定值,在用模拟器自动补偿过程中进行二次修正,最终可以实现利用模拟器对雷达进行幅相一致性标定。在文献[7]中实际验证,在相同的情况下,对塔标定与利用模拟器无塔标定,输出的误差电压差值很小,通过试验验证了利用模拟器无塔标定能确保雷达设备正常工作。采用模拟器快速进行幅相一致性标定后,雷达进行跟踪国际空间站试验,在理论弹道引导条件下,雷达捕获跟踪正常,试验结果满足雷达技术指标要求。
4 结论
本文介绍了脉冲雷达幅相一致性标定的原理及流程,并提出两种脉冲雷达幅相一致性标定的方法。经试验验证,两种方法所标定出的接收通道幅相补偿参数可以满足脉冲雷达跟踪快速目标的需要。两种方法的相位一致性标定均需要标校塔和信号源的支持,针对无塔情况下快速标定现实需求,结合雷达自身特点,研究了利用模拟器进行快速幅相一致性标定的方法,其原理与方法一相同,经过实际标定验证,满足雷达快速幅相一致性标定的要求,下一步针对标定精度进行深入研究。
[1] 袁永根.单脉冲测量雷达培训教材[M].南京:南京十四所.1994.
[2] 杨万海。雷达系统建模与仿真[M].北京:西安电子科技大学出版社.2007.
[3] 程钧,钟岚.单脉冲雷达系统幅相一致性自动化标定的实现[J].现代雷达.2007.4
[4] 毛南平,徐昌庆,张忠华.船载测控雷达海上无塔校相技术[J].成都:电讯技术.2004
[5] 刘童岭,邵长宝,周成刚.船载雷达无塔动态相位标校方法研究[J].科学技术与工程. 2011.8
[6] 仇三山,汪远玲,杨洪军.深空测控系统跟踪接收机射电星校相的可行性分析.电讯技术.2010.8
[7] 陈大庆等.基于模拟器的单脉冲雷达幅相修正方法研究[J].飞行器测控学报 2012.4
卢长海.1977年10月.工程师.从事无线电测量相关工作.硕士研究生
Study on amplitued-phase consistency fast calibration method of Pulse radar
Lu Changhai
(Unit 91550 of PLA,Dalian,116023,Chian)
Pulse radar for amplitued-phase consistency demand is higher,before the task needs to be calibrated radar’s amplitued-phase consistency.This paper introduces the influence of unbalanced amplitude phase characteristics,gives the principle and method of amplitude-phase imbalance calibration.Due to phase consistency calibration all need the support of the calibration tower and signal source,Introduced no tower phase consistency calibration analysis commonly used methods,proposed under the condition of no tower by simulators for fast calibration of amplitued-phase consistency.
monopulse;amplitued-phase consistency;simulator
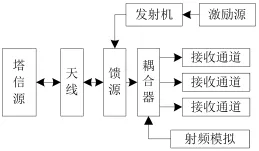
图3 激励信号和模拟信号信息流程
