铁路箱梁预应力自动张拉技术研究
2015-01-03肖祥淋马林朱希同王乐然
肖祥淋,马林,朱希同,王乐然
(中国铁道科学研究院铁道建筑研究所,北京100081)
铁路箱梁预应力自动张拉技术研究
肖祥淋,马林,朱希同,王乐然
(中国铁道科学研究院铁道建筑研究所,北京100081)
为克服传统预应力施工方法的缺陷,研制了铁路桥梁预应力自动张拉系统。该系统可实现预应力自动化平衡张拉及精确施加,并用伸长量来实时校准和调控,具有张拉、持荷、锚固全过程智能控制,数据自动采集、存储,数据无线远程传输等功能。现场试验结果表明:张拉力偏差<0.5%、伸长值偏差<6%、两端不平衡力<5 kN。与传统张拉工艺相比,应用该系统可显著提高工作效率,降低劳动强度。
铁路桥梁 预应力 自动张拉 控制
混凝土桥梁的预应力施工质量决定了桥梁结构的耐久性和运营安全性。预应力张拉控制出现偏差会引起梁端锚固端局部开裂、梁体中部横向开裂、沿纵向扭曲不均匀起拱、预应力筋断裂等现象,进而造成预应力失效甚至结构破坏。
我国铁路预应力混凝土梁主要采用后张法施工,采用预应力钢绞线和夹片式锚固体系。传统施工工艺为预应力筋两端的张拉设备独立工作,通过人工测读液压表手动操控油泵进行张拉。通过读取压力表的油压换算出张拉力;使用钢板尺人工测量张拉伸长值。传统后张法基本为人工操作,施工过程复杂,由于受到张拉系统测力方式、系统摩阻、控制精度、作业人员操作差异等的影响,预应力控制精度低、施工数据离散度大、记录数据真实性差、张拉效率低,难以保证预制梁的施工质量。另外,千斤顶、油表校正周期短,需在监督部门频繁进行校正,即增加施工成本又影响生产进度。为了彻底克服传统后张法的诸多弊端,研制了高精度、智能化的预应力自动张拉系统。此外,施工信息化管理已成为铁路桥梁现代化建设的发展方向,自动张拉系统提供了施工数据自动采集、传输功能,能够实现与铁路工程管理平台的数据传输和实时监测。
1 组成及功能
1.1 系统组成
预应力自动张拉系统包括机械动力系统、传感器测量系统、智能张拉控制系统、数据管理系统及辅助系统5部分,具体组成如图1所示。

图1 自动张拉系统组成
所研制的预应力自动张拉系统采用穿心轮辐式压力传感器测量张拉力,拉线式位移传感器测量伸长值,配置高性能电磁阀的液压系统作为动力加载。该系统应用工业可编程控制器(PLC)自动采集数据并辅助于计算机进行过程控制和数据管理。此外,该系统还具有油温控制、油压保护、智能诊断及报警等功能。张拉系统的主机柜、副机柜分设于梁体两端,机柜之间以总线型数据线连接并通讯,通过计算机预设张拉工艺参数,实现全过程智能预应力张拉。其结构如图2所示。
1.2 系统功能
预应力自动张拉系统可实现桥梁预应力施工的张拉、静停、锚固全过程自动化;对预应力施工过程进行全程监测控制,精准控制张拉力和预应力筋的伸长值;对施工结果进行信息化管理,数据自动储存且不可更改,确保施工数据真实有效,保证预施应力准确和结构安全,提高施工管理水平和劳动效率。预应力自动张拉系统的主要功能包括:①梁体两端自动平衡、同步张拉,精确调控张拉力值;②张拉力与伸长值的实时监测调控,严格执行双控标准;③施工数据的自动采集、实时记录、图表分析,历史数据查看与追溯;④通过无线传输系统及互联网技术,远程传输施工数据;⑤与铁路工程管理平台进行数据传输和指令控制;⑥通过标准试验机,对张拉系统进行智能标定;⑦智能化人机交互功能,便于参数设置、数据分析;⑧辅助控制系统确保设备安全和施工安全。

图2 自动张拉系统结构
2 系统研发
2.1 机械动力系统
机械动力液压系统主要包括液压泵站和千斤顶两部分。液压站是独立的液压装置,通过驱动装置控制供油的方向、压力和流量;千斤顶为液压驱动的动力作用装置。液压系统核心部件包括高压截止阀、电磁阀和径向柱塞泵。液压系统的工作压力>35 MPa,采用超高压截止阀的模式解决液压系统的可靠性和耐久性问题。已有研究及应用情况表明,超高压截止阀液压系统具有控制精度高、持荷稳压性能好、耐久、稳定等优点。其关键技术特点如下:
1)截止式换向阀性能较稳定,不受液压系统中常见的微小杂质影响,满足张拉过程的加载、稳压、持荷、回顶等操作要求。截止阀的压力储备较大,零位时,静态过载压力可达最大工作压力的2倍。截止阀的油路通、断连续过渡,保证了压力输出的稳定性。
2)径向柱塞泵比轴向柱塞泵耐冲击,寿命长,控制精度高,控制压力高,最大压应力为70 MPa。
2.2 传感器测量系统
传感器测量系统的核心部件主要包括力传感器、位移传感器,辅助部件包括液压传感器、温度传感器。力传感器直接测量张拉力的大小,位移传感器测量预应力筋的伸长量。辅助测量系统的液压传感器作为张拉力的校核,温度传感器用来测量液压油温和环境温度。各传感器均通过PLC控制的智能模块相对独立地工作,工业电脑对各个传感器的数据进行综合分析,实现张拉系统的过程控制和安全辅助功能。
1)力传感器
通过比选、室内试验、现场应用测试,力传感器采用新研制的穿心轮辐式传感器,其安装在千斤顶顶部直接测量力值大小。
穿心轮辐式传感器主要由轮毂、轮箍、轮辐、应变片、胶封、传感器信号接头等组成。测力方式上,通过测量轮毂和轮箍间受到的纯剪切力并经换算得到外力大小。该测力方式不受径向力影响,对一定范围内位置变化的作用力不敏感,抗偏载能力强,测试准确。其具有结构合理、测试精准、重复性好、性能稳定、过载保护等优点。性能参数如表1所示。轮辐式测力传感器的结构特点为:①具有低高度外形结构,基本不增加钢绞线的下料长度,整体刚度大,弹性变形小。②穿心孔径较大,适用于不同根数的预应力筋穿束。
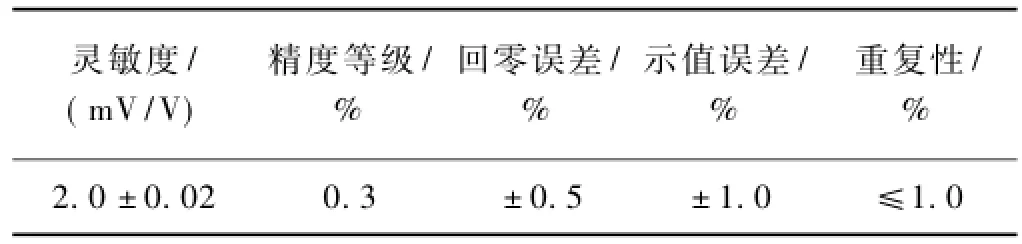
表1 穿心轮辐式测力传感器性能参数
2)位移传感器
位移传感器采用拉线式传感器,安装在千斤顶外侧直接测量钢绞线伸长量。其具有测量精度高、测量行程长、结构紧凑、适应高温高压环境等特点。
位移传感器主要由拉绳、拉绳缠绕器、信号控制器、复位装置等组成。拉线位移传感器在位移发生时拉绳伸长或缩短,螺纹状的轮毂带动精密旋转感应器旋转,输出与拉绳移动距离成比例的电信号,以此计算位移的大小、方向及速度。位移传感器可将机械运动转换成可以计量、记录或传送的电信号。预应力张拉时,由于千斤顶的活塞会有一定的转动,在测量位移时通过研制专门的配套工装可以消除该转动对位移测量精度的影响。拉线式位移传感器性能参数见表2。
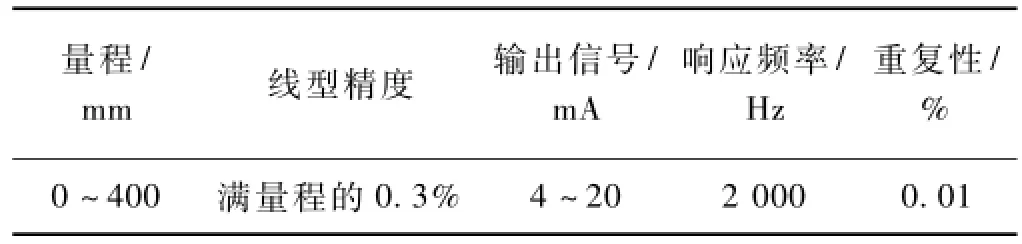
表2 拉线式位移传感器性能参数
2.3 控制系统
智能控制系统包括主控系统和辅控系统,主辅系统通过总线型串联实现智能控制和协同工作。控制系统中的硬件由工业电脑、可编程逻辑控制器(PLC)、外围低压控制开关元件、变压器、开关电源、A/D转换模块、测力仪表等组成,工作关系如图3所示。软件为VB和C++两种编程语言编写的多功能张拉控制程序。智能控制系统具有功能完善、适应性强、稳定可靠、人机交互、动态智能判断等特点。
以简支箱梁为例,预应力张拉施工需要4个泵站和千斤顶,由1套主控系统和3套辅控系统组成,如图4所示。

图3 控制系统工作关系示意
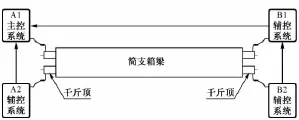
图4 简支箱梁智能控制系统示意
2.4 数据管理系统
1)过程控制
张拉过程中由PLC控制的采集模块对张拉力、伸长值等参数进行自动采集,基于桥梁技术条件编写的分析软件对张拉过程数据进行智能计算分析,对A1,A2,B1,B2端分别生成张拉力与时间、伸长值与时间、张拉力与伸长值关系曲线以控制张拉过程,如图5所示。

图5 张拉过程张拉力、时间、伸长量关系曲线
2)数据存储
张拉施工数据存储在数据库中。数据库具有便捷的数据查询和筛选功能,考虑到铁路工程管理平台对施工数据信息的高效管理需求,选用SQL Server数据库。该数据库性能可靠具有可扩充性,适用于大型联机事务处理、数据仓库等方面。
3)数据传输
通过数据无线传输模式实现张拉数据从施工现场到工程建设管理平台的实时远程传输。张拉过程或结果数据通过设备的数据无线发射模块和施工现场的互联网无线数据交换机将数据上传至Internet公网。工程建设管理平台通过公网接收数据,实现施工数据的传输和访问。
3 现场试验
在一新建铁路预制梁场,对跨度32 m预制T梁进行了自动张拉系统现场试验。共进行了6片梁的张拉。根据试验结果(表3),实际张拉力与设计值的偏差值<0.5%;钢绞线实测伸长值与设计值的偏差<6.0%;实测预应力筋两端不平衡力<5 kN。
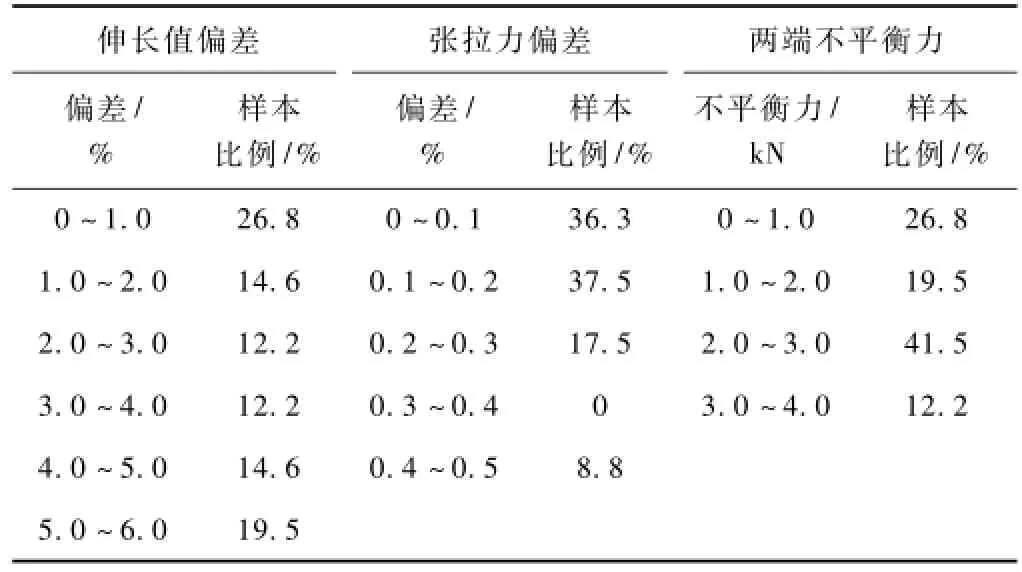
表3 现场试验结果
4 结语
本文所介绍的预应力自动张拉系统具有以下主要特点:①预应力自动化平衡张拉,梁端不平衡力<5 kN;②预施应力控制精确,张拉力偏差<0.5%;③张拉过程中以伸长量进行实时校准和调控,预应力筋伸长值偏差<6%;④辅助控制系统确保设备的安全运行。
自动张拉控制系统能够实现张拉、持荷、锚固过程智能控制,张拉数据自动采集和存储,结果图表自动生成并无线远程传输。研制的预应力自动张拉系统适用于铁路桥梁的预应力施工,与传统张拉工艺相比,可显著提高工作效率,降低劳动强度。
[1]中华人民共和国铁道部.TB 10203—2002铁路桥涵施工规范[S].北京:中国铁道出版社,2002.
[2]中华人民共和国铁道部.TB 10002.3—2005铁路桥涵钢筋混凝土和预应力混凝土结构设计规范[S].北京:中国铁道出版社,2005.
[3]中华人民共和国住房和城乡建设部.JG/T 321—2011预应力用液压千斤顶[S].北京:中国标准出版社,2011.
[4]中华人民共和国住房和城乡建设部.JG/T 319—2011预应力用电动油泵[S].北京:中国标准出版社,2011.
[5]中华人民共和国国家质量监督检验检疫总局.JJF 1305—2011线位移传感器校准规范[S].北京:国家质检出版社,2011.
[6]魏争伟.高铁连续梁预应力损失控制技术探讨[J].铁道建筑,2014(11):16-19.
[7]吴冲,肖祥淋.铁路预制梁预应力自动张拉系统技术研究[J].铁道建筑,2014(11):11-13.
[8]钱厚亮,贾艳敏,林锦国,等.新型智能预应力张拉设备的研制[J].自动化仪表,2009,30(12):49-51.
[9]朱新实,刘效尧.预应力技术及材料设备[M].北京:人民交通出版社,2012.
(责任审编李付军)
U448.21+3;U448.35
A
10.3969/j.issn.1003-1995.2015.05.05
1003-1995(2015)05-0015-04
2015-01-13;
2015-03-10
肖祥淋(1981—),男,福建三明人,助理研究员。
