基于Gist和PHOG特征的场景分类
2015-01-02贺遵亮
刘 静,郭 建,贺遵亮
(湘潭大学材料与光电物理学院,湖南湘潭411105)
1 概述
场景分类是计算机图片分类的重要分支。将场景图片区分为自然场景与人造场景可以为后续不同类别场景分类提供前期分类保证[1],划分成自然场景和人造场景后可以针对这2类场景再次提取不同的场景描述特征,进行第2次场景精细划分,因此,首先进行自然场景与人造场景的区分有着很重要的实际意义。
全局语义建模方法将场景视为一个整体进行描述,用全局特征来进行场景描述。当前使用的最好的全局语义建模方法是文献[2-3]提出的采用空间包络模型作为场景全局语义特征的描述算子Gist,将场景图像通过不同方向和不同尺度的Gabor滤波器组后划分成4×4的网格,取平均值级联形成图像的全局Gist特征。由于全局Gist特征是稀疏网格划分的,因此同一网格中可能包含不同的场景部分,为此,文献[4]提出采用局部Gist特征作为场景描述算子,但局部Gist特征在进行特征加权的时候只采用了一次加权,造成了特征维数过高。
梯度方向直方图(Histograms of Oriented Gradient,HOG)[5]不仅可以描述局部特征,同样可以用来描述整幅图像的特征。HOG特征首先统计细胞单元内的局部梯度方向信息,然后在若干个细胞单元组成的区域内进行归一化,而Gist特征是对整个图像滤波后在局部区域内取各方向、各尺度的均值。两者都不对图像进行预分割,利用的都是图像在空间域里像素值不连续形成的方向统计信息,将两者组合起来描述场景图像能够提供更丰富的信息,文献[6]将Gist特征与HOG特征进行组合实现图像的场景分类。
局部Gist方法提取的特征维数庞大,HOG特征没有考虑到图像不同空间尺度划分对分类性能产生的影响。为此,本文提出一种基于Gist特征和分层梯度方向直方图(Pyramid Histogram of Oriented Gradient,PHOG)[7]特征组合的场景分类方法。采用改进局部Gist方法替代全局Gist方法,用PHOG特征替代HOG特征,然后进行特征组合实现场景分类。
2 特征提取
2.1 局部Gist特征
图像的Gist特征提取,在实际的实现中采用的是将图像与不同方向和不同尺度的Gabor滤波器组进行滤波,将滤波后得到的图像划分为网格,在每个网格内部取平均值,最后将滤波后得到的所有图像的每个网格均值级联起来,得到图像的Gist特征。
一幅大小为h×w的灰度图像f(x,y)用nc个通道的滤波器对图像进行卷积滤波,其中,nc等于滤波器尺度和方向数的乘积,这样得到nc个滤波后的图像。将每幅滤波后的图像划分为4×4的网格,每个网格内取平均值得到一个特征。将每个网格块的特征级联起来,得到图像的Gist特征,即:

局部Gist特征是将上述特征提取过程中的网格划分改为由16×16的网格进行划分,对于每一个网格再次采用大小为4×4的网格进行划分,将每一个二级网格采取加权求和,权重矩阵W构建方法为对应像素到各子区域中心像素归一化距离的倒数,再将所有的二级子网格特征进行级联,得到局部Gist特征。该方法细化了场景特征的提取,有效地降低了同一网格中包含不同场景的概率,从而提高了场景分类的正确率,但其还存在一个问题,就是提取的特征维数过高。如一幅大小为256×256像素的图像,其提取后的特征维数为:16×16×4×4×32=131 072维。如果不采取降维处理等手段,特征维数过于庞大,包含很多冗余信息,同时,给数据处理带来很大的困难。
2.2 HOG特征提取
HOG特征是一种在计算机视觉中用于目标检测的常用特征描述符,最早是由法国研究机构在2005年提出来的,是对图像的局部区域内梯度方向信息的统计。HOG特征是在一个大小统一的网格密集的细胞单元上计算,且采用重叠部分对比度归一化的方法来提高特征描述的性能,而光照条件变化和局部几何变换这2种形变只会出现在更大的空间领域上,所以,HOG方法对它们可以保持一定程度的不变性。
HOG特征的提取过程如下:
(1)对图像进行伽马颜色校正,然后用2个一维的模板:
分别对图像的垂直方向和水平方向做卷积运算。在称为细胞的单元内,根据每一个像素的梯度方向,在事先定义的方向区间里,以梯度幅值为权重,统计梯度方向直方图。像素点的梯度方向定义为:
建设生态清洁型小流域 服务南京生态文明建设——访江苏省南京市水利局局长张孝科……………………………… 韦凤年,张瑜洪,吴卿凤等(20.58)

其中,m,n分别为像素的行号和列号;Gx,Gy分别为图像在x,y方向的梯度;G0为得到的梯度方向。
(2)在被称为块的区域内对上一步得到的方向直方图进行正规化。用式(3)对块内的直方图进行正规化:

其中,i=1,2,…,n,n 为直方图的区间数;ε 为小的正常数。
(3)使用截断阈值th对得到的直方图进行截断:

(4)用式(3)对截断后的直方图进行正规化,得到最终的梯度方向直方图。正规化后的各细胞直方图按一般的图像扫描方式,即从上到下、从左到右的方式连接起来,形成特征向量。
HOG特征考虑了图像空间位置的分布,是描述图像形状信息的一种有效方法,但是没有考虑到图像的不同空间尺度划分对分类性能可能产生的影响。
3 特征组合
针对全局Gist特征与局部Gist的缺点,本文提出改进的局部Gist特征。在局部Gist特征提取过程中,进行加权以后,每一个二级子块的特征为16维,显然特征维数过大。同时,为了突出中心区域在整个区域所在的比重,将上述16维的向量从左到右、从上到下重新排列为4×4的矩阵,并再次进行加权,其权重与局部Gist特征中所采用的权重相同。这样每一个二级子块就降为一个特征向量,较局部Gist特征的维数有了较大幅度的降低,同时,也突出了每一个二级子块的中心区域场景的特征值。具体提取过程如图1所示。
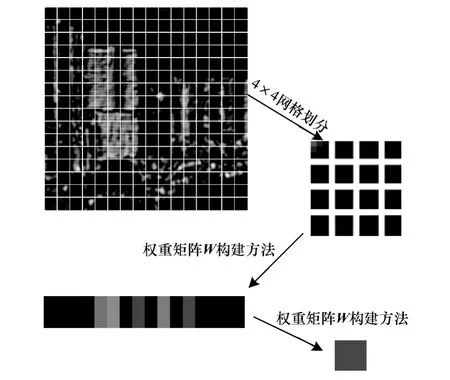
图1 改进的局部Gist方法特征提取过程
图1左上角为经过滤波后的图片,将图片采用16×16的网格进行划分,经过稠密网格划分后可以发现每一个网格中基本上只包含了一类场景;右上角为每一个一级子网格经过4×4的子网格划分后的情况;左下角为第一次采用权重处理后,每一个一级子网格计算出来的特征值;右下角为将一级子网格特征值进行重新排列后再次进行权重处理后得到的特征值。经过这样处理,每一个一级网格提取出一个特征值,大大降低了特征维数,同时,经过权重处理以后,每一子网格的中心部分得以突出。
本文采用将2种特征进行首尾相连的方式来进行特征组合[9],形成一维特征向量,以此来描述场景图片。
4 实验结果及分析
根据上述方法提取图像改进的局部Gist特征和PHOG特征,并将两者进行组合,得到图像的描述特征。采用支持向量机(Support Vector Machine,SVM)[10-11]对特征向量进行学习,使用 LibSVM[12]工具箱,核函数为径向基函数,采用交叉验证得到最优参数,对场景进行自然场景与人造场景进行2类分类。每组实验进行10次训练与测试,取10次的平均值作为测试结果。
本文测试实验的硬件及软件环境:计算机运行内存4 GB,64 Byte Windows7 操作系统,Matlab2013b。
考虑到WS图像库样本数量有限,本文测试只对OT库进行训练样本数量与分类正确率的统计,以及特征提取、分类耗时和内存占用率的统计。
4.1 WS图像库分类测试
WS图像库是华盛顿大学的场景图像库,本文进行实验测试时选取该库中的12个类别,从其中选取合适的图片组合成自然场景与人造场景图像库,其中,自然场景193幅,人造场景153幅。由于场景数据库中图片数量不多,为充分进行训练,从每类中随机选取一半数量图片进行训练,余下部分作为测试样本。
将本文方法与文献[2]的全局 Gist方法、文献[4]的局部Gist方法、文献[6]的Gist+HOG 方法进行对比。在实际测试中,文献[6]采用全局Gist特征。WS场景库测试比较结果如表1所示。
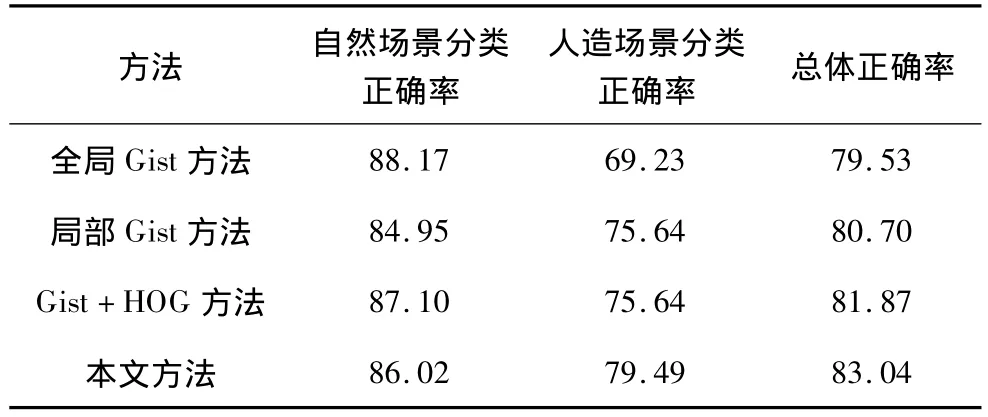
表1 WS场景库下不同方法的分类正确率对比 %
从表1可以看出,在WS场景库中,虽然全局Gist方法,和Gist+HOG方法的自然场景区分正确率比本文方法高,但是总体正确率均低于本文方法,其中,全局 Gist方法的人造场景正确率不足70%。
4.2 OT图像库分类测试
MIT的Oliva&Torralba(OT)场景库共包含了如图2所示的8类场景,分别为海滩360幅、森林328幅、山脉374幅、乡村410幅、高速公路260幅、城区308幅、街道292幅和高楼356幅,将其中前4类划归为自然场景,后4类划归为人造场景,每幅图像大小均为256×256像素,共计2 688幅。
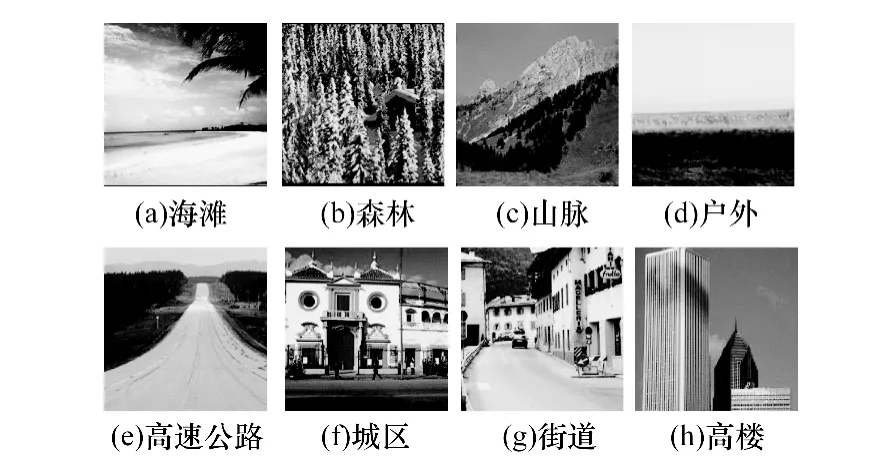
图2 OT场景图像数据库
在OT场景库下,本文首先比较了不同训练样本数量下4种方法分类正确率的变化情况,如图3所示。从图中可以看出,随着训练样本数的增加,分类正确率逐步提升,在训练样本数达到150左右时,分类正确率基本上趋于稳定,可以看出,本文方法在不同训练样本数量时分类正确率均高于其他3种方法。
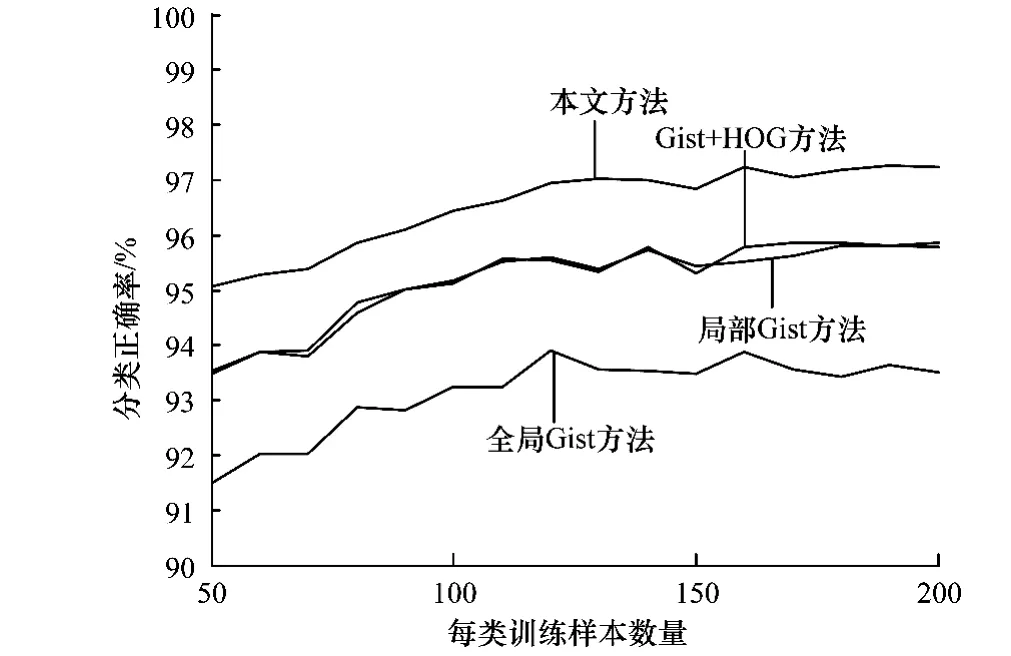
图3 训练样本数量与分类正确率的关系
综合训练样本数量和测试样本数量考虑,采用训练样本数为150时来进行4种方法分类正确率的比较。具体比较结果如表2所示。
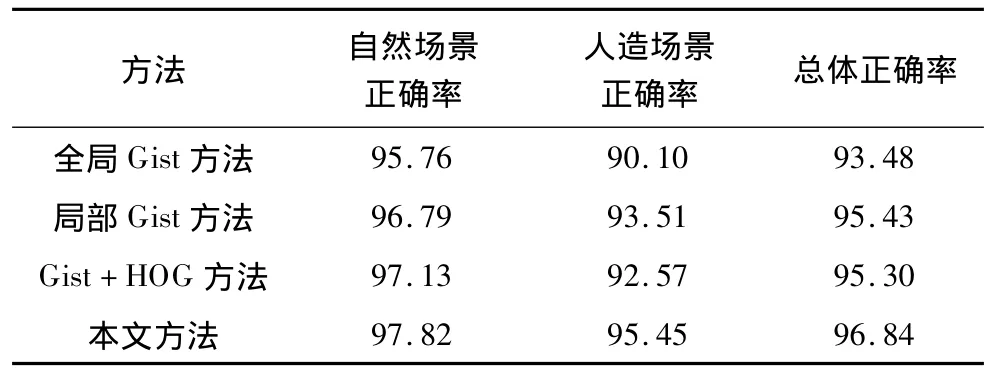
表2 OT场景库下不同方法的分类正确率对比 %
从表2可以看出,在OT场景库中,本文方法能有效提高自然场景与人造场景的区分正确率,正确率达到96.84%,对于自然场景和人造场景每一类的分类正确率相较与其他方法均有提升。
针对本文实验数据库,还统计了特征提取及分类所占用的时间,以及内存占用情况,具体为:特征提取是将整个库中的图片提取特征后统计每一幅图像特征提取所占用的平均时间;分类时间为统计一定数量图片分类耗时取平均值得到单幅图像分类耗时;内存占用率是计算机在只运行该程序时统计的物理内存占用率。具体比较结果如表3所示。
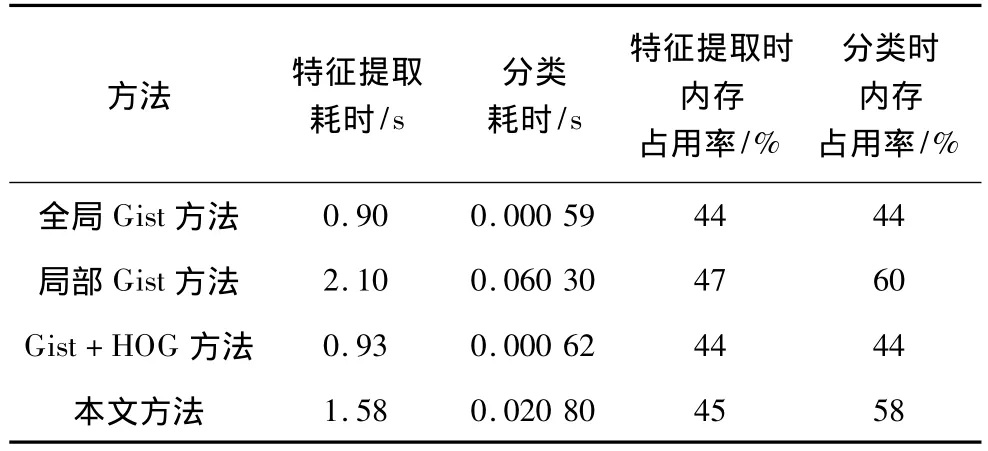
表3 OT场景库下不同方法的性能指标
从表3可以看出,对于每一张图片从特征提取到分类结束本文方法用时为1.6 s,虽然较全局Gist及Gist+HOG 2种方法用时稍长,较速度最快的全局Gist方法延时了0.6 s左右,考虑到场景分类的应用情况,该时间消耗在可接受范围内。还可以看出,虽然内存占用率在分类时达到了58%,但在计算机快速发展的今天,相比于本文方法所带来的分类正确率的提升,该限制因素可以忽略不计。因此,从上述分类测试及耗时和内存占用率情况的比较可以看出,在忽略其他因素影响下,本文方法可以达到提升场景分类正确率的目的。
5 结束语
场景分类中局部Gist特征维数过高,单一特征不能很好地描述场景。为解决该问题,提出一种基于改进的局部Gist特征和PHOG特征进行组合的特征向量,以描述图像场景,结合支持向量机进行自然场景与人造场景分类。实验结果表明,该方法的分类正确率高于全局Gist方法、局部Gist方法和Gist+HOG方法。然而,本文只讨论了自然场景与人造场景分类,如何实现2类场景中每一类场景的精确区分是今后的研究重点。
[1] 刘 静.基于场景 Gist的快速场景分类研究[D].吉林:吉林大学,2013.
[2] Oliva A,Torralba A.Modeling the Shape of the Scene:A Holistic Representation of the Spatial Envelope[J].International Journal of Computer Vision,2001,42(3):145-175.
[3] Oliva A,Torralba A.Building the Gist of a Scene:The Role of Global Image Features in Recognition[J].Progress in Brain Research:Visual Perception,2006,155:23-36.
[4] 杨 昭,高 隽,谢 昭,等.局部Gist特征匹配核的场景分类[J].中国图象图形学报,2013,18(3):264-270.
[5] Dalal N,Triggs B.Histograms of Oriented Gradients for Human Detection[C]//Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Washington D.C.,USA:IEEE Press,2005:886-893.
[6] 刘 宏,普杰信.一种改进的自然场景特征提取方法[J].计算机工程,2011,37(21):182-184.
[7] Bosch A,Zisserman A,Munoz X.Representing Shape with a Spatial Pyramid Kernel[C]//Proceedings of the 6th ACM International Conference on Image and Video.New York,USA:ACM Press,2007:401-408.
[8] 赵碧茹.场景特征可分性与协同求解方法[D].合肥:合肥工业大学,2012.
[9] 黄荣娟,姜佳欣,唐银凤,等.基于多特征组合的图像纹理分类[J].计算机应用与软件,2011,28(8):12-16.
[10] Burges C J C.A Tutorial on Support Vector Machines for Pattern Recognition[J].Data Mining and Knowledge Discovery,1998,2(2):121-167.
[11] Vapnik V.The Nature of Statistical Learning Theory[M].2nd ed.Berlin,Germany:Springer-Verlag,2000.
[12] Chang Chih-Chung,Lin Chih-Jen.LIBSVM:A Library for Support Vector Machines[J].ACM Transactions on Intelligent Systems and Technology,2011,2(3):1-27.