精确灌溉控制系统的应用研究
2015-01-02王永涛张和喜周琴慧
王永涛,雷 薇,张和喜,周琴慧
(贵州省水利科学研究院,贵州 贵阳 550002)
精确灌溉控制系统的应用研究
王永涛,雷 薇,张和喜,周琴慧
(贵州省水利科学研究院,贵州 贵阳 550002)
针对贵州火龙果生产存在的问题,结合生长特性及对环境要素的需求特点,进行精确灌溉控制系统的应用研究。通过监测、传输、诊断、决策及火龙果水分动态管理,按照火龙果生长期等信息实现精确灌溉控制。精确灌溉控制系统裁剪性良好,可根据灌溉规模、成本及作物种类满足不同农户的个性化需求,充分挖掘火龙果生产的节能增效潜力,具有广阔的应用前景。
火龙果; 精准灌溉;控制系统;设备选型;通讯方式;应用研究
0 引言
火龙果是精品特色水果和喀斯特石漠化山区治理的良好经济作物,产业化前景相当广阔,然而,火龙果适应性、生物学特性、物候期等方面迥异于常规果树[1]。目前在火龙果生产上存在着管理粗放,对火龙果营养特性和需水规律针对性不强等问题,极大地影响了火龙果生产效益的充分发挥。为此运用计算机、网络通讯等技术,设计火龙果节能增效精细化管理技术方案,进行精确灌溉控制系统的应用研究,为提高火龙果产量和改善品质,充分挖掘火龙果生产的节能增效潜力提供一种新的途径[2]。
1 精确灌溉控制系统概述
1.1 试验选点
精确灌溉控制系统控制面积为 1 hm2,由 30 个电磁阀(平均 1 个电磁阀控制 0.03 hm2)、30 个传感器、4 000 个滴头、1 个控制柜(含控制器)、1 台 PC(具备上网条件)、太阳能供电及滴灌管网等组成,达到火龙果节能增效精细化管理的目的。
目标田块分布示意图如图 1 所示,围绕主管对称分布于 2 侧,共 30 块处理区域,30 个 12 V 电磁阀控制灌溉与否,30 个土壤湿度传感器实时采集当前土壤湿度。系统的工作模式为手动和自动 2 种控制模式。在自动控制模式下,管理者设定好火龙果所需土壤含水量,当系统检测到当前土壤湿度低于火龙果正常生长所需时,系统自动打开电磁阀,实施灌溉;当系统检测到当前土壤湿度大于或等于火龙果正常生长所需时,系统自动关闭电磁阀,停止灌溉。系统自动进入下一次循环扫描阶段。在自动控制模式下,管理者可通过手动方式打开或关闭电磁阀,进行灌溉与否。

图 1 系统总体概况图
1.2 目标区域灌溉制度设计
火龙果的株行距定为 1.5 m×2.0 m,田间取水采用与压力源水管直接相连接的方式,压力源压力应不低于 0.1 MPa。压力源水管与滴管管网连接处应安装手动控制开关阀,工作状态时,应处于长期的开启状态;当目标区域长期无需灌溉,可关闭开关阀使压力管网不再承压。
1.2.1 设计灌水定额
火龙果设计灌水最大定额按《滴灌工程技术》中的公式计算:

式中:mmax为设计最大净灌水定额;γ 为干容量,取1.51 g/cm3;z 为计划湿润层深度,取 45 cm;p 为设计土壤湿润比,取 18.5%;θmax为适宜土壤含水量质量百分比上限,取 39%;θmin为适宜土壤含水量质量百分比下限,取 28.6%。
式(1)中的基本资料数据为查 GB/T 50363—2006《节水灌溉技术规范》所得,经过计算,灌水最大定额为 16.1 mm/hm2。
1.2.2 设计最大灌水周期
最大灌水周期按下式计算:

式中:Tmax为设计灌水周期;Ea为设计耗水强度,取3 mm/d;η 为灌溉水利用系数,取 0.98。
经过计算,设计灌水周期为 5.2 d,取 5 d。
1.2.3 灌溉用水制度
结合项目区自然和水源条件、火龙果的生长特性和项目区实际管理经验,项目区火龙果的灌水时间主要依次分为发芽前后到开花期、新梢生长和幼果膨大期、果实迅速膨大期,第 1 时段灌水 3 次,第 2 时段灌水 6 次,第 3 时段灌水 4 次,年灌水次数 13 次。
1.3 滴灌管网部分
滴灌管网部分拟采用主管、支管、毛管 3 级结构,初步定为主管管径为 Ф50 mm,支管管径为Ф30 mm,毛管管径为 Ф10 mm。滴头采用压力补偿式滴头,滴头数量约为 4 000 个,滴头株行距与火龙果种植一致,亦为 1.5 m×2.0 m。
2 精确灌溉控制系统设备参数与选型
火龙果生产精确灌溉控制系统的特点如下:1)以土壤墒情数据作为精确灌溉控制指标。实时采集土壤墒情数据与系统数据库预设的该类数据分析对比并控制灌水,实现根据作物不同生长阶段的需水量要求精准灌溉。2)自动灌溉,节能节水。能按预设需水量数据库要求定时、定量地进行灌溉。3)测流、测压及自动输配水。灌溉系统重要管网分水处安装远传水表、压力表和电磁阀,实时监测压力,分别控制灌溉区域优化配置水资源。4)便捷的控制和管理方式。控制地点可为现场地控、管理房中控、远程网络遥控等,还可采用手机进行控制。针对精确灌溉控制系统的特点,需要对主要设备进行选型。
2.1 控制器部分
2.1.1 控制器的设计与配置
按照精确灌溉控制系统的实际要求,控制器必须同时满足以下条件:1)采用超低功耗、高性能的嵌入式处理器;2)配备多种接口资源,包括模拟信号采集、开关量输入和输出、脉冲信号输入等;3)板载工业级 GSM/GPRS/CDMA 通信模块,方便用户选择不同的通信组网方式;4)提供用户设置软件,开放式接口,方便与组态软件及其他软件连接;5)支持至少 1 路 RS-232/485 方式的用户数据接口,可接入 PLC 等各种设备。根据控制系统要求,本研究选择性价比较高的 XBS8051f310 作为精确灌溉控制系统的控制终端。
2.1.2 控终终端的性能
XBS8051f310 以 C8051f310 为核心控制器,集成了模拟、数字信号的采集,使继电器控制输出和无线数据通信于一体。可以直接接入标准变送器输出的模拟、各种电平、干触点、脉冲等信号。控制终端集成了先进的 GPRS 无线通信、嵌入式单片机和工程测量与控制等技术,稳定性强,可靠性高,实时性好,应用性广,功能强大。
2.2 土壤湿度传感器
2.2.1 土壤湿度传感器的选择
水分是决定土壤介电常数的主要因素,测量土壤的介电常数,能直接稳定地反映各种土壤的真实水分含量,与土壤本身的机理无关,是目前国际上最流行的土壤水分测量方法。PH-TS 土壤湿度传感器精度和灵敏度均较高,信号输出形式种类多,可满足不同采集设备的要求,是目前较为通用的土壤水分传感器,故采用 PH-TS 传感器采集土壤湿度。
2.2.2 土壤湿度传感器的标定
利用现有的 TDR(时域反射)进行标定。灌水,使待测容器中土壤达到饱和状态,用现有 TDR设备,如 MP-406 土壤水分测试仪测量土壤体积含水量,并利用 PH-TS 进行电压测定,记录测值,以后每 2~3 d,重复以上的步骤进行测定,直到土壤体积含水量达到 10% 左右。该方法快速、准确。
2.3 电磁阀
2.3.1 电磁阀的规格参数
电磁阀是系统的关键执行元件,其性能的优劣,直接影响到系统的稳定性,应根据实际使用要求、管网铺设线路的不同及成本等综合考虑。由于低压自保持式脉冲电磁阀功耗低,性能稳定,工作状态为正脉冲打开、负脉冲关闭,故本研究采用 12 V低压自保持式电磁阀。
2.3.2 驱动芯片的选择
TC4426 驱动芯片是 1.5 A 双高速功率 MOSFET驱动器,输入电流峰值高,工作在 4.5~18.0 V 的宽电源,具有容性负载能力强的特点,被广泛应用在开关式电源、线路驱动器、脉冲变压器驱动等场合。在编制采集驱动程序时应按照 TC4426 的时序图进行。当在时间 tD1,输入由 0 V 变为 5 V,应延时 tF,输出由高电平 VDD变为低电平 0 V;当在时间tD2,输入由 5 V 变为 0 V,应延时 tR,输出由低电平0 V 变为高电平 VDD。TC4426 时序图如图 2 所示。

图 2 TC4426 时序图
2.3.3 驱动电路的设计
电磁阀驱动电路以 TC4426 驱动芯片为核心进行设计,当 P1.6 为高电平,P1.7 为低电平时,输出端7 为低电平,5 为高电平,输出端电压 V31 为 12 V,V13 为 -12 V;反之,当 P1.6 为低电平,P1.7 为高电平时,输出端 7 为高电平,5 为低电平。输出端电压 V31 为 -12 V,V13 为 12 V;若 V31 为 12 V 时,电磁阀打开,则 V31 为 -12 V 时,电磁阀关闭。通过输出正负脉冲信号,实现电磁阀工作状态的自由转换。图 3 为电磁阀驱动电路图。
2.4 太阳能电池板

图 3 电磁阀驱动电路图
2.4.1 典型功耗测量
精确灌溉控制系统的用电负载有 ARM 开发板、数据收发模块等,全部采用 5 V 供电。表 2 为下位机的功率消耗,以最大电流消耗值为标准,经过综合计算,1 个下位机的能量消耗约为电流 400 mA,功率消耗 2 W。
表 2 下位机各器件功耗
实验中用电流表测得上位机输入端的电流总消耗为 400 mA 左右,400 mA× 5 V = 2 W,标准的太阳能蓄电池的电压为 12 或 24 V,而控制器的工作电压为 5 V,需加 12 V 转 5 V 变压器,满足控制器的工作电压要求。
2.4.2 供电系统各参数计算
2.4.2.1 太阳能电池板的选择
1)太阳能日照时间的确定。根据本地气象条件,最长的阴雨天设定为 7 d,核查光照条件,7 个阴雨天后一般是 3 个晴天。太阳能年平均日照小时数,取 4.5 h。
2)太阳能电池板功率 Ps的确定。

式中:P 为用电负载,取 2 W;T 为负载每天工作小时数,取 8 h;T1为连续最长的阴雨天数,取 7 d,即在没有光照的情况下,系统能持续工作 7 d;ξ 为安全系数,包括充放电效率、灰尘遮挡系数等的综合系数、电池组件组合损失修正系数,取 0.9;T2为太阳能年平均日照小时数,取 4.5 h。
3)太阳能电池板参数。太阳能电池板分为单晶和多晶 2 种。单晶硅电池板能量转换效率高,稳定性好,相对成本也较高。从材料成本来看,多晶硅太阳电池板低于单晶硅太阳电池;从制造方面来看,多晶硅组件封装成本较低,且易于制备成方型,目前在生产的晶体硅太阳能电池板中,多晶硅太阳能电池板的规模也在不断扩大。
在本设计中,考虑到贵州光照条件和时间都不是很充裕,选用能源效率较为高效的单晶硅,经计算选择 30 W 太阳能电池板,将太阳辐射能源直接转换成直流电能,经由控制器存贮于蓄电池内储能备用,供负载使用。
2.4.2.2 蓄电池的选择
目前普遍采用计算太阳能蓄电池容量的公式,具体如下:

1)蓄电池容量 Bc的计算。计算公式为式中:A 为安全系数,取 1.1~1.5;Q 为负载平均耗电量,以工作电流乘以日工作小时数计算,即 Q = 400 mA × 8 h = 3.2 A•h;D 为修正系数,-10℃ 以下时取 1.2,-10℃ 以上时取 1.1,一般工作环境在 0℃以上时取 1.0;C 为蓄电池放电深度,碱性镍镉蓄电池取 0.85,全密闭免维护铅酸蓄电池取 0.80。
经过计算,Bc约为 33.6 A•h,考虑到系统长期使用,维护不便等特点,采用密闭免维护铅酸蓄电池,容量为 35 A•h,电压为 12 V。
2)实际电池耗电量 Bs(连续 7 个阴雨天)的计算。具体为

3)太阳能控制器的参数。在使用太阳能板对蓄电池进行充放电管理过程中,需要使用太阳能控制器控制整个过程的工作状态。控制器应具备对蓄电池的过充和过放过程的保护,以及光控、时控、温度保护等功能。目前,常用的太阳能充电控制器主要由一些模拟电路构成,因此存在以下缺点:a.主要为一些简单逻辑控制,无法全方位保证整套系统安全;b. 电路一旦设计完后,更改较难;c. 电路实现闭环控制较难,因此对温度的补偿功能很难达到,使得整个电路不一定达到最佳状态;d. 由于使用场合及条件限制,不适合进行批量生产。
目前的太阳能控制器中加入了微处理器以实现对充放电过程的智能化控制,通过微处理器强大的可编程功能,充分提高对太阳能充电控制的功能,具有以下优点:a. 由于微处理器提供多种类型 I/O接口,所以对系统的各种保护均比较完整;b. 微处理器通常具备可编程功能,通过软件程序,可实现在不同的工作状态下对控制器参数的修改,大大简化了模拟电路,并能实现所需要的各个功能;c. 目前,8 或 16 位的单片机均能满足对充电过程的控制,且芯片价格便宜,功能齐全,对外围电路的要求也比较简单,整体性能均比模拟电路稳定很多。
目前太阳能控制器的原理图如图 4 所示,可以看出整套太阳能系统由微电脑控制器、温度传感器、电流传感器、PWM 功率驱动、输出保护及功率驱动和一些场效应晶体管组成。
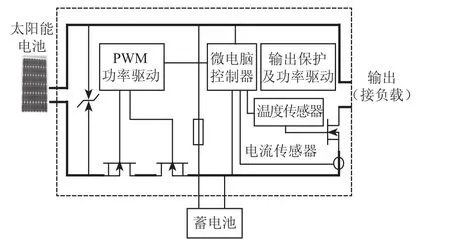
图 4 太阳能充电控制器原理简图
3 精确灌溉控制系统通讯部分设计
精确灌溉控制系统不仅要求较高的数据传输速率、较宽的信道带宽和较强的保密性,还要求数据的实时监测和精确控制。基于 GPRS 的无线通讯方式具有安装使用方便、性价比高、覆盖范围广和扩展性好等优点,在水利自动化方面得到广泛应用,故选用 GPRS 通讯方式进行系统组网[4]。
3.1 GPRS 入网方案
中心服务器端利用 ADSL 等动态公网 IP,再加上动态域名解析软件,客户端采用 DNS 方式解析中心服务器 IP 地址完成双向通讯,这种方式的优点是减少了公网固定 IP 的费用。DTU 模块只能与公网 IP的数据中心服务器相互通信,而用户所在的数据中心服务器,一般通过路由器与公网 IP 相连接,处于局域网内,是无法与处于公网的 DTU 模块直接通信的,须利用端口映射技术来实现。
本应用研究主要是通过路由器实现端口映射的。在路由器的转发规则下,使用虚拟服务器进行端口映射,当在路由器上做好端口映射后,也就定义了广域网服务器端口与局域网网络服务器之间的映射关系,所有对广域网服务端口的访问将会被重新定位给通过 IP 地址指定的局域网网络服务器。则GPRS 网络所有发向 10000 端口的数据,都将转发到数据监控中心服务器上。同理,数据监控中心服务器也可以将数据发送到公网的计算机上。
3.2 ModBus 协议
GPRS RTU 通过 GPRS 无线网络将数据包发往远程电脑上配套的测控中心软件。测控中心软件将数据包整理成 ModBus RTU 协议的格式,通过电脑上的串口(或虚拟串口)发给组态软件(或其他应用软件)使用。
组态软件作为客户机(主站)发送读/写命令帧,测控中心软件作为服务器(从站)发送应答帧。测控中心与 GPRS RTU 终端是一对多的关系,GPRS RTU 终端与外接设备也是一对多的关系。通过对地址码(1-247)分段确定操作的是 GPRS RTU终端还是终端外接的设备,本协议将(1-200)的地址码作为终端的地址码,将(201-247)的地址码作为终端 RS-485 口外接设备的地址码。在对外接设备进行读写指令时,须先指定是要操作哪台 GPRS RTU 终端的外接设备,可以通过先发送 GPRS RTU终端操作指令(地址码 1-200)确定当前操作的是哪台终端,然后再发送外接设备的操作指令(地址码201-247)。
基本的通讯字节数据格式是:1 个起始位,8 位数据,低位在前,无奇偶校验位,1 个停止位;默认串口设置为:波特率 9 600 bit/s,无奇偶校验,8 个数据位,1 个停止位。
4 精确灌溉控制系统软件设计
组态软件是指在工业自动化领域中利用系统资源配置软件化的组态理念,提供快速构建工业自动控制系统监控功能、通用层次的应用。它通过计算机信号对农业生产现场自动化设备或过程进行监视、控制和管理,处于控制系统的监控层,可以对工业现场环境进行可视化动画模拟,对多源异构数据进行高效管理 ,开放的数据接口与 I/O 设备的广泛支持为通讯与联网提供了保证[5]。
将工业组态软件 6.55 应用于农业精确灌溉控制系统中,具有适应性强、开放型好、易于扩展、经济性好等优点,可以有效地提高农业示范田的自动化水平,组态软件功能模块如图 5 所示。

图 5 组态软件功能模块图
4.1 数据库设计
系统数据库采用 SQL Server 2005,作物对象表为作物区域表的父表,作物名称、区域编号、浇灌时间分别为各表的主键,图 6 为数据库框架图,具体构成如下:
1)作物对象表。包括作物名称,最小、最大湿度,最低、最高温度。
2)作物区域表。包括作物区域编号、大小,以及作物对象、灌溉方式。
3)作物灌溉计划表。包括灌溉区域编号、时间,灌溉量,是否已经灌溉。
4)作物状态表。包括灌溉区域编号,设备通信状态,土壤、空气温湿度传感器状态,雨量温度计状态,风速、流量传感器状态,土壤、空气温湿度值,雨量值,风速值,流量值。
5)作物历史表。包括作物区域编号、灌溉时间、灌溉量,灌溉前、后湿度,以及土壤、空气温湿度值,雨量值,风速值,流量值。

图 6 数据库框架图
4.2 程序设计
接通电源启动系统后,进入初始化状态。当系统数据接收正常后,系统可以同时完成以下任务:获取土壤湿度,设定温湿度限值和灌溉计划时间,自动控制灌溉,手动控制灌溉。
当管理者设定控制模式为自动控制时,系统具有定时、自适应灌溉等功能,当选择定时灌溉时,若当前时间与计划灌溉时间相等,实行灌溉,否则停止灌溉;当选择自适应灌溉时,若当前环境土壤湿度小于设定作物所需土壤湿度时,实行灌溉,否则停止灌溉。程序设计流程图如图 7 所示[6]。
4.3 系统运行效果
精确灌溉控制系统于 2014 年 3 月在罗甸县火龙果示范基地运行,一段时间的运行结果表明:系统通信稳定,温、湿度数据准确,处理方便快捷,并能准确控制执行元件;自动和手动 2 种控制方式均有较高的灵敏度;管理者可通过登录口令,修改相关参数的限值,趋势图等图形显示效果好,运行界面美观;能满足生产实际的要求。系统运行界面如图 8 所示。
5 结语
研究的精确灌溉控制技术以火龙果灌溉制度为例开展应用,完成了系统的设备(包括太阳能供电部分)选型和配置、GPRS 无线通讯部分、SQL Server 2005 灌溉系统数据库、系统控制软件的设计和开发,并于 2014年 3 月在罗甸县火龙果示范基地运行,还方便用于烤烟、玉米和葡萄等作物的精确灌溉控制。精确灌溉控制系统优势明显,能够节约水资源,满足作物不同生育期的适宜需水量要求,提高作物品质;无需通电布线,节约劳动力,节能增效,具有很好的应用和推广价值。

图 7 程序设计流程图

图 8 系统运行界面
参考文献:
[1] 戚艳艳. 基于 Labview 的水肥耦合灌溉控制系统的研究[D]. 华中农业大学,2011: 9-13.
[2] 张兵,袁寿其,成立. 节水灌溉自动化技术的发展及趋势[J]. 排灌机械,2003, 2 (21): 37-38.
[3] 中华人民共和国建设部,国家质量监督检验检疫总局. GB/T 50363—2006 节水灌溉工程技术规范[S]. 北京:中国计划出版社,2006: 121-122.
[4] 王玺联.“花生壳”与端口映射在 GPRS 流量监控系统中的应用实现[J]. 中国科技信息,2009 (24): 99-104.
[5] 姜训宇,段生梅,母利. 节水灌溉自动化技术的发展及前景分析[J]. 安徽农学通报,2011, 17 (15): 207-208.
[6] 王巧丽,楚俊菊. 国内农业节水灌溉现状与发展趋势[J].山西水利,2003 (6): 33-34.
Application Research of Precision Irrigation Control System
WANG Yongtao, LEI Wei, ZHANG Hexi, ZHOU Qinhui
(Water Resources Research Institute of Guizhou Province, Guiyang 550002, China)
For the problems of dragon fruit production in Guizhou province, combining with the growth characteristics and demand characteristics of the environmental factors, the article introduces application research of precision irrigation control system. By monitoring, transfering, diagnosing, decision-making and managing of moisture dynamic of dragon fruit, it realizes the precise irrigation control according to growing and other information of dragon fruit. The system meets the individual needs of different farmers under irrigation size, cost, and crop species, to fully exploit the potential of energy efficiency in dragon fruit production. It has broad application prospects.
dragon fruit; precise irrigation; control system; equipment selection; communication mode; application research
S275
A
1674-9405(2015)03-0030-07
2015-01-12
水利部公益性行业科研专项经费项目资助(201201025);贵州省水资源高效利用创新服务能力团队建设(黔科合院所创能[2010]4003);贵州省水利厅科研项目“贵州省大型灌区续建配套与节水改造效益评价研究”(KT201306)
王永涛(1986-),男,贵州贵阳人,工程师,主要从事灌区物联网及信息化应用等研究工作。
