车载摄像头障碍物检测中搜索策略研究
2015-01-02邝沛江庄衍竖
邝沛江 康 磊 庄衍竖
华南理工大学电子与信息学院
在基于视觉感知的汽车安全智能预警系统中,针对障碍物搜索的策略问题,提出了一种可以减少搜索量,增加实时性的方法,完成道路上障碍物的初步筛选的任务,进而指导车辆在道路上安全行驶。
引言
安全驾驶在如今高速发展的社会是一个逐渐被强调和关注的问题。随着各国车辆的数目迅猛增加,每天几乎都能听到关于交通事故的新闻。这现状引起了人们对汽车安全辅助驾驶技术给予了空前的重视。辅助驾驶是智能交通研究领域的一个举足轻重的组成部分,是一项融合了车辆工程、人工智能、计算机视觉等多学科领域理论的技术,是未来车辆的发展趋势。
本文针对基于视觉感知的车载摄像头安全智能驾驶系统中的障碍物搜索策略问题,提出一种减少搜索量,增加实时性的方法。通过先验知识,只对具有潜在危险的区域进行障碍物的搜索,能够大幅度的减少搜索量,提高实时性。
为了引出本文所研究的降低搜索量的问题,本文的第二节将对整个障碍物检测系统作一个简单的介绍,而在第三节将给出本文提出的降低障碍物搜索量的方法。
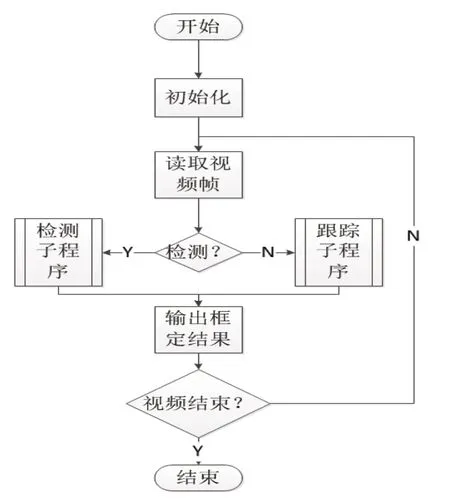
图1 处理流程图
障碍物检测的框架简介
本文使用前视摄像头,摄像头放置于汽车驾驶位置上方的后视镜处,实时拍摄道路前方的图像,将摄像头拍摄所得的图像进行分析,对路面上的障碍物进行框定。本文对图像的处理流程图如图1 所示,对路面上的障碍物进行框定的效果图如2 所示。
在图1 的检测子程序中,如果需要对一整幅图像进行障碍物的检测,搜索量将是整幅图像的大小。如今一般的摄像头的分辨率较高,大约为848×480 左右。因此,整幅图像进行搜索是一个很大的搜索量。鉴于此,本文提出降低搜索量的方法,在第三节给出。
危险区域的建立
本文着重对障碍物检测算法中的搜索量的降低进行研究。
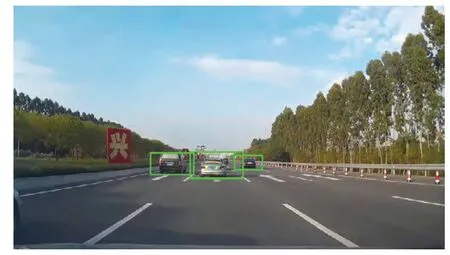
图2 障碍物框定效果图

图3 车载摄像头采集的路面状况

图4 直接构成危险的车辆出现的区域
如图3 所示,从车载摄像头采集得到的路面状况图像中可以发现,障碍物(主要是车辆)主要出现在图像的下半部分,而上半部分主要由天空,树木等背景构成。而在行驶过程中对宿主车辆构成直接危险的车辆则主要出现在图像的左下角,右下角,以及正前方这三个位置,如图4所示。
红色框表示离散的危险区域,绿色框表示综合的危险区域。
通过对车载摄像头采集到的路面状况图像的分析,获知车辆更有可能出现的区域,即对问题的先验知识。本文通过此先验知识,对每个视频帧动态刻画如图4 中的绿色框所示的区域,只针对绿色框内的图像内容进行搜索。从图2 中可以看出,绿色框内的图像大小占原图像大小的约为1/2~1/3。又因为如今流行的障碍物检测算法,如车底阴影,Haar特征法等,都与搜索区域的大小成线性关系,甚至更高阶的比例关系。因此,采用本文提出的障碍物搜索策略,利用先验知识,只对车辆可能出现的位置进行障碍物检测,将至少能减低1/2~1/3 的搜索量,大幅提高实时性。
结束语
本文研究利用智能信息处理理论处理道路路况障碍物检测的问题,目的在于降低检测方法中检测障碍物的搜索量,达到提高实时性的目标。从而为实现辅助驾驶员驾驶的智能行车系统提供可能。
