超声波取样钻机电耦合特性研究
2015-01-01梁彩红韦旌坤史立京卜长根
梁彩红,韦旌坤,史立京,卜长根
(1.中国地质大学〈北京〉工程技术学院,北京100083;2.湖北地矿建设工程承包集团有限公司,湖北武汉430072)
1 概述
2013年12月,“嫦娥三号”发射,“玉兔”到达月球表面,主要实现表面月壤的取样。对月壤进行采样时,通常采用采样铲或螺旋钻头。而钻取岩石时,传统钻探技术受到诸多限制:地面钻探设备主要依靠重力来保证轴向力,实现足够钻压,但月球上重力仅为地球的1/6;相同钻机在月球上很难保证钻压;传统钻机功率小至几千瓦,大到几十千瓦,而地外探测车动力主要来自于太阳能电池,目前能提供的最大功率是几百瓦,很难达到常规钻机所需功率等。
超声波取样钻是基于声波/超声波能量耦合原理,运用压电陶瓷作为驱动元件,因而具有独特的特点:结构简单、体积小、质量轻、无旋转运动、无需润滑,能够适应外太空复杂的采样任务,满足地外钻探的需求。
目前,美国、德国对超声波取样钻的研究取得了一些成就。美国国家航空航天局(NASA)下属的喷气推进实验室(JPL)研发了超声取样钻机(USDC)(如图1所示),并且在此基础上,改造设计,研发了不同性能的取样钻,有超声波土壤贯入器、高温超声取样钻等。对USDC进行了计算机模拟分析与实验。德国C.Potthast等人对超声取样钻的研究沿用了美国的模型,进行了测量、动力学和理论分析,得出自由质量具有无规则运动的特性。

图1 JPL设计的USDC样机
中国地质大学(北京)机械动力学课题组设计了超声波取样钻专利样机(ZL201210006711.0),如图2所示。主要由超声致动器(压电陶瓷、预应力螺栓、后盖板、变幅杆)、自由质量、钻杆3部分构成,超声致动器是能量转换器,将电能转换为机械能,工作原理:超声波取样钻在钻进过程中,利用超声致动器将电能转换为机械能,产生超声波频率的振动,变幅杆端部将振动放大,自由质量碰撞冲击钻杆,使钻杆获得更多能量。在此过程中,能量以弹性能的形式保存。这种方式利用取样钻本身的弹性、惯性来传递应力波,取样钻在这些应力波下做拉伸、收缩运动。当冲击能量大于岩石破碎所需的能量时,岩石就破碎了。
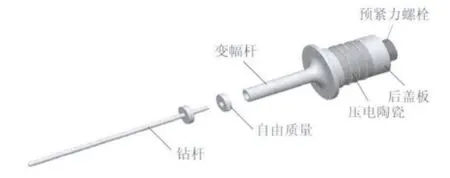
图2 中国地质大学(北京)超声取样钻结构简图
2 超声波取样钻机电特性研究
用ANSYS对超声致动器进行模态分析时,边界条件为电路开路(Q=0),机械自由(F=0),以求证超声致动器是否具有很强的机电耦合特性;仅考虑机械结构场情况下对超声致动器做模态分析。通过以上2种求解,来分析超声取样钻的机电耦合特性。
2.1 超声致动器耦合场模态分析
ANSYS解决压电驱动的机电耦合问题采取广义矩阵和广义向量表示的控制方程如下:
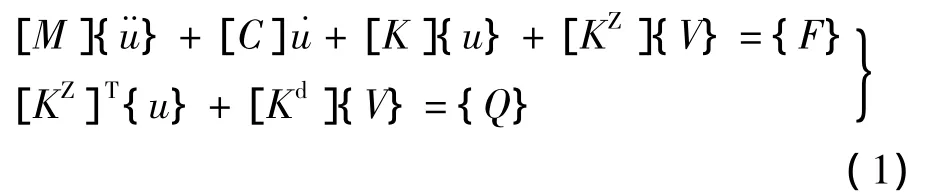
式中:[M]——质量矩 阵;[C]——阻尼矩阵;{u}——位移向量;[K]——刚度矩阵;[KZ]——机电耦合系数矩阵;{V}——电压向量;{F}——所受外力;[Kd]——介电常数矩阵;{Q}——自由电荷量。
因此,对超声致动器进行机械结构分析时,需要利用压电陶瓷的特性来构造矩阵[Kd]、[KZ],然后就可以根据公式(1)对超声致动器进行分析。
超声致动器在ANSYS中进行建模(如图3所示),致动器各个组件(后盖板、预应力螺栓、压电陶瓷、变幅杆)采用节点耦合,压电陶瓷节点间通过VOLT电压耦合。

图3 超声致动器模型
在ANSYS对超声取样钻模态分析,分以下几步。
(1)单元类型与材料参数建立。后盖板、预应力螺栓、变幅杆的单元类型与材料参数见表1。SOLID185用于构建三维固体结构,通过8个节点定义,每个节点有沿着x、y、z方向平移的3个自由度。

表1 致动器主要组件参数
压电陶瓷采用SOLID5单元,SOLID5具有三维磁场、热场、电场、压电场和结构场分析的能力,并且可以在各场间实现有机耦合,具有8个节点,每个节点最多有6个自由度。单元选项为(UX、UY、UZ、VOLT)。
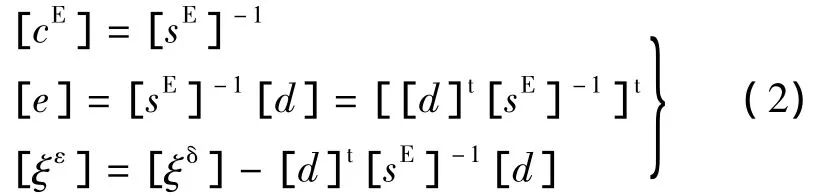
压电陶瓷生产厂家的PZT-8压电陶瓷材料参数见表2,与ANSYS仿真需要的材料参数存在差异性,所以要对压电陶瓷材料特性依公式(2)进行必要转换,得到基于ANSYS环境下压电陶瓷的材料参数。

表2 压电陶瓷的性能参数
压电陶瓷在ANSYS中,其中压电常数矩阵:
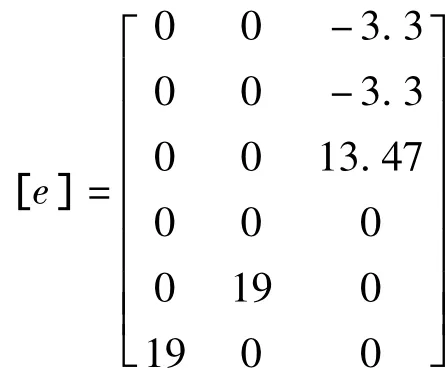
弹性刚度常数矩阵:
相对介电常数矩阵:
根据公式(3)、(4),将压电陶瓷的材料参数代入,得到了机电耦合系数矩阵[KZ]、介电常数矩阵[Kd],因此,只需对致动器再施加边界条件和载荷,公式(1)便可求解。
(2)建模及网格划分。在ANSYS中建立超声致动器的模型,采用节点耦合法对压电陶瓷、预应力螺栓、后盖板、变幅杆进行结构连接。采用自由网格划分后盖板、预应力螺栓、变幅杆,映射网格划分压电陶瓷。
(3)施加边界条件。致动器陶瓷原件表面所有节点通过 VOLT自由度耦合,命令为:cp,1,volt,all;*get,n1,node,0,num,min;cp,2,volt,all,*get,n2,node,0,num,min;cp,3,volt,all;*get,n3,node,0,num,min;cp,4,volt,all,*get,n4,node,0,num,min;cp,5,volt,all;*get,n5,node,0,num,min。不施加结构边界条件。
(4)求解超声致动器耦合条件下一阶纵振频率为24226 Hz,二阶纵振频率为43100 Hz。
2.2 超声致动器机械结构场模态分析
不考虑机电耦合,致动器的机械结构的动力学线性控制方程如下:

式(5)中{F}=0时,基于ANSYS,在结构场中对超声致动器进行模态分析时,压电陶瓷采用SOLID185单元。不施加任何边界条件,求解后,得到超声致动器单一机械结构下一阶纵振频率为23982 Hz,二阶纵振频率为42925 Hz。
2.3 分析与讨论
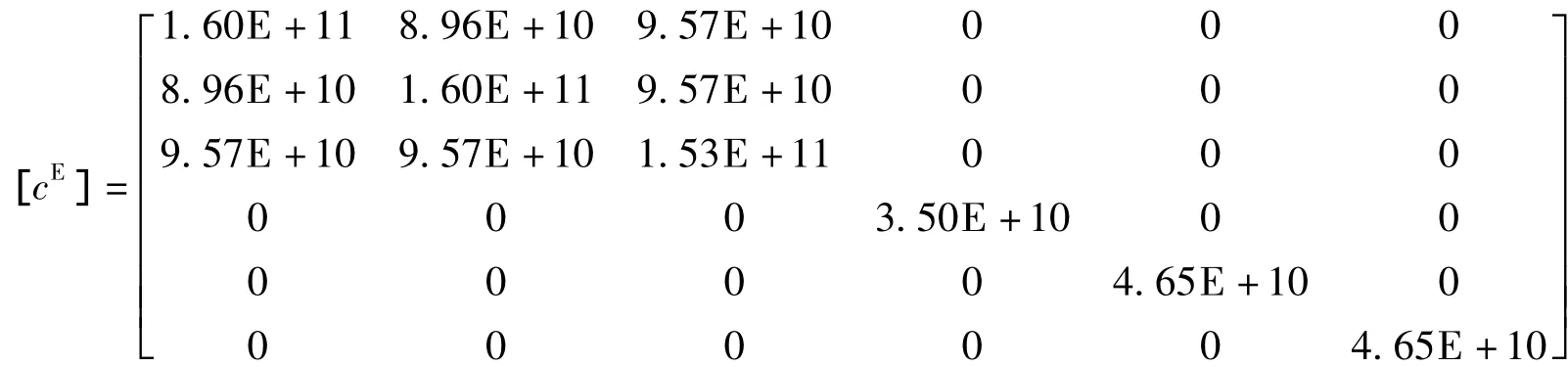
当在压电陶瓷上施加V=496sin(ωnt+φn)的电压时,得到超声致动器机电耦合场下一阶模态频率共振的响应(如图4所示)。分别提取压电耦合场中致动器变幅杆端部在一阶、二阶模态频率下响应的机械参数(位移、速度、加速度)(见表3)。
图4 压电耦合场下致动器一阶模态频率下的共振响应
在单一机械结构场中,Potthast等为了求解致动器的响应,采用PZT-8陶瓷片,施加496 V脉冲电压,等效于在压电陶瓷正极面上施加幅值0.73 N的力载荷[4],所以在结构场施加的力函数F=0.73sin(ωnt+φn),可分析超声致动器在结构场中一阶模态频率共振的响应(如图5所示)。分别提取压电耦合场中致动器变幅杆端部在一阶、二阶模态频率下响应的机械参数(位移、速度、加速度)(见表3)。
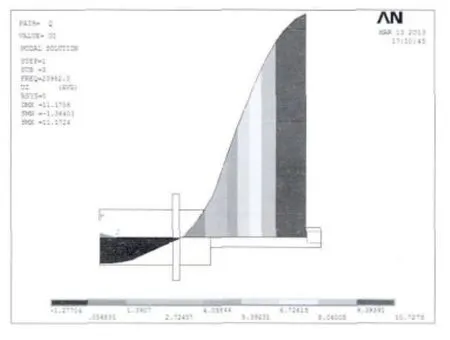
图5 机械结构场下致动器一阶模态频率下的共振响应

表3 超声致动器端部模态频率和位移、速度、加速度幅值
3 结论
(1)超声致动器在工作过程中机电耦合作用很弱,因此可以采用解耦的方法对超声致动器进行设计。
(2)采用解耦的方法可以将超声波钻致动器的动力学分析转化为集中力对连续柱激励共振响应的求解。
[1] Xiaoqi Bao,Yoseph Bar-Cohen,Zensheu Chang,et al.Modeling and Computer Simulation of Ultrasonic/Sonic Driller/Corer(USDC)[J].IEEE transactions of Ultrasonic,Sonic and frequency control,2003,50:1147 -1160.
[2] 卜长根,王龙,韦旌坤.超声激励冲击太空取样钻,中国:ZL 201210006711.0[P].2012 -07 -18.
[3] 林玉书.超声换能器的原理及设计[M].北京:科学出版社,2004.
[4] C.Potthast,J.Twiefel,J.Wallaschek .Modeling approaches for an ultrasonic percussion drill[J].Journal of Sound and Vibration,2007.405-417.
[5] Stewart Sherrit,Yoseph Bar-Cohen,Benjamin P.Dolgin,et al.Sample Acquisition and In-Situ Analysis Using the Ultrasonic/Sonic Driller/Corer(USDC)and Robotic Platforms[J].Proceeding of the 6th International Symposium on Artificial Intelligence and Robotics& Automation in Space,2001.
[6] S.Imaoka.Conversion of Piezoelectric Material Data An ANSYS Support Distributor from Engineering Consultant[K].Collaborative Solutions Inc,1999.
[7] ANSYS耦合场分析指南[K].安世亚太,2008.
[8] 党沙沙,张红松.ANSYS 12.0多物理耦合场有限元分析从入门到精通[M].北京:机械工业出版社,2010.
[9] 姜德义,郑拯宇,李林,等.压电陶瓷片耦合振动模态的ANSYS模拟分析[J].传感技术学报,2003,(4):452 -456.
[10] 许龙.基于有限元法的耦合振动夹心换能器的特性和设计研究[D].陕西西安:陕西师范大学,2008.
[11] 王龙.太空超声取样钻机的设计研究[D].北京:中国地质大学(北京),2011.
[12] 韦旌坤.超声激励冲击太空超声取样钻动力学仿真[D].北京:中国地质大学(北京),2013.